

Шаг 4.Рисунок 13.6
13.2.2. Метод Топкиса-Вейнотта
Рассмотренные
в начале параграфа 13.2 основной алгоритм
метода возможных направлений и пример
13.1 в последовательно получаемых
подзадачах выбора направления на каждой
итерации используют множества активных
ограничений
![]() .
С вычислительной точки зрения для
постановки задачи (шаг 4 основного этапа)
удобнее использовать только часть
ограничений, так как ЗЛП выбора направления
оказывается меньшей размерности. А
учитывая только активные ограничения
для данной доступной точки, получим
зигзагообразный процесс, ухудшающий
сходимость. Рассмотрим пример такого
ухудшения, решая задачу с использованием
основного алгоритма.
.
С вычислительной точки зрения для
постановки задачи (шаг 4 основного этапа)
удобнее использовать только часть
ограничений, так как ЗЛП выбора направления
оказывается меньшей размерности. А
учитывая только активные ограничения
для данной доступной точки, получим
зигзагообразный процесс, ухудшающий
сходимость. Рассмотрим пример такого
ухудшения, решая задачу с использованием
основного алгоритма.
Пример 13.3
![]()
при условиях
![]() ,
,
![]() .
.
Определим функции:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
Начальный
этап.
![]() .
.
Основной этап.
Итерация 1
![]() .
.
![]() ,
следовательно, для нахождения возможного
направления подъёма
функции
в точке
решаем ЗЛП
при условиях:
,
следовательно, для нахождения возможного
направления подъёма
функции
в точке
решаем ЗЛП
при условиях:
![]()
![]()
.
Иначе:
![]()
![]() .
.
Решение
этой задачи:
![]() ,
,
![]() ,
,
![]() .
.
Решаем одномерную задачу:
![]() .
.
Очевидно,
что
![]() .
Отсюда
.
Отсюда
![]() .
.
Итерация 2
![]() .
.
, следовательно, переходим к решению задачи
![]()
решение
этой задачи:
,
![]() ,
,
![]() и т. д. Ход решения задачи представлен
на рис. 13.7.
и т. д. Ход решения задачи представлен
на рис. 13.7.
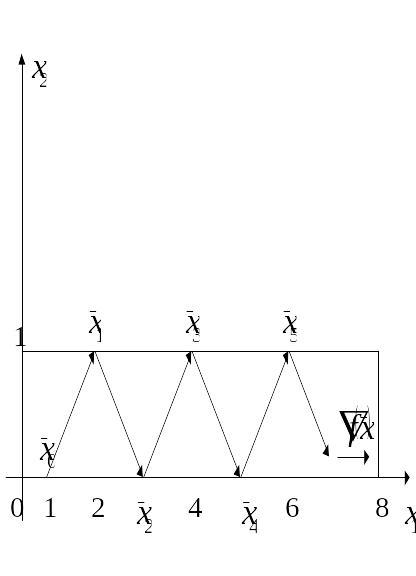
Шаг 5.Рисунок 13.7
Движение от к происходит внутри допустимой области, но не будет достигнута верхняя граница для .
Таким образом, учёт лишь множества активных ограничений может не только замедлить процесс поиска решения, но и привести к сходимости к различным точкам. Такая ложная сходимость называется явлением заедания в методе возможных направлений. Это явление обусловлено тем, что получаемый на каждой итерации шаг становится всё короче и короче, а вектор направления колеблется между близлежащими границами. Шаги становятся короче не потому, что в результате одномерного поиска находится оптимальное решение, а потому, что пересекается близлежащее ограничений, которое не учитывалось в подзадаче выбора направления.
Как один из способов устранения явления заедания применяется подход, в котором активные ограничения вовсе не участвуют. Такой подход используется в методе Топкиса-Вейнотта.
Алгоритм метода Топкиса-Вейнотта
Начальный этап. Выбрать начальную точку . положить .
Основной этап.
Шаг 1. Решить ЗЛП:
(13.18)
при условиях
,
![]() ,
,
![]() ,
(13.19)
,
(13.19)
![]() ,
,
,
,
![]() -
решение этой задачи.
-
решение этой задачи.
Шаг
2. Если
![]() ,
то
-
решение задачи.
,
то
-
решение задачи.
Шаг 3. Определить , решая задачу одномерной оптимизации:
,
где
![]() .
.
Шаг 4. Положить , и перейти к шагу 1.
Очевидно, что отличие от основного алгоритма возможных направлений состоит в подзадаче выбора направления.
Рассмотрим решение примера 3.3 с помощью метода Топкиса-Вейнотта.
Пример 13.4.
![]()
![]()
![]()
![]() .
.
Начальный
этап.
![]() ,
.
,
.
Основной этап.
Шаг
1. ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Решаем задачу:
при условиях
![]()
![]()
![]()
![]()
![]()
.
Решение этой задачи:
![]() ,
,
![]() ,
,
![]() .
.
Шаг
2. Так как
![]() ,
то переходим к шагу 3.
,
то переходим к шагу 3.
Шаг 3. Решаем задачу:
![]() .
.
Определим :
![]()
![]() .
.
Решение
задачи:
![]() ,
,
![]() .
.
Шаг
4. Положить
![]() .
и перейти к шагу 1 на итерацию 2.
.
и перейти к шагу 1 на итерацию 2.
Продолжая итерационный процесс, на третьей итерации получаем оптимальное решение. Ход решения этой задачи изображён на рис. 13.8.

Рисунок 13.8
Очевидно, что скорость сходимости в этом случае значительно лучше, чем скорость сходимости в примере 13.3, где использовался основной алгоритм метода возможных направлений.