


Розділ 2
Підставивши у формулу (2.25) значення і = па /п; vм = πdn/60, ω = πпа /30 і виразивши витрати насіння в кубічних метрах (м3), дістанемо
Qзаг = 24πQvмb , 10 ω(1 − η)
звідки
ωmin = |
2πQvмb |
, |
(2.26) |
||
104 Qзаг(1 |
− η) |
||||
|
|
|
|||
де ωmin — мінімальна кутова швидкість котушки, с–1; vм — швид-
кість руху посівного агрегату, м/с.
Найбільша кутова швидкість котушки ωmax визначає можливість
випадання зерна із жолобків. Розглянемо положення, коли зерно знаходиться на краю жолобка. На нього діє виштовхувальна сила —
сила котушки mω2rк, якій протидіє сила тертя fmg, що утворюється
між зерном і котушкою.
Падіння зерна можливе тільки за умови рівності сил
fmg = mω2r , |
(2.27) |
к |
|
де f — коефіцієнт тертя зерна по металу; m — маса зерна; rк — ра-
діус котушки.
Із рівняння (2.27) отримаємо найбільш можливу кутову швид- кість котушки висівного апарата
ωmax = fg/rк.
Отже, кутова швидкість котушки перебуває у таких межах:
|
2πQvмb |
|
fg |
(2.28) |
|
|
|
|
< ω < |
rк . |
|
104 Qзаг(1 − η) |
|||||
2.2.2. Основи теорії та розрахунку дискових висівних апаратів
Особливістю сівалок точного висіву є секційне розміщення робочих агрегатів з індивідуальним приводом до кожного висівного апарата, що забезпечує копіювання рельєфу поля і рівномірне загортання на- сіння по глибині в ґрунт. Змінюючи передаточне відношення від осі привідних коліс до висівного апарата, можна змінювати відстань між насінинами (гніздами) і кількість насінин у гнізді.
132

Основи теорії та розрахунку машин для сівби і садіння
Вихідними даними для технологічного розрахунку висівних апа- ратів пунктирних і гніздових сівалок є кількість зерен на один гек- тар і схема розміщення насіння (гнізд) відповідно до агротехнічних вимог.
Загальну кількість насінин Qн на 1 га визначаємо за формулою
Q = 104 Zн , |
(2.29) |
н blн
де b — ширина міжрядь; lн — відстань між насінинами (гніздами); Zн — кількість насінин у гнізді.
Отже, для того щоб засіяти 1 га ріллі з поступовою швидкістю аг- регату vм, висівний апарат повинен подавати Qн′ насінин, од/с,
Qн′ = vмbQн |
= |
vмZн |
, |
(2.30) |
|
||||
104 |
|
lн |
|
|
з частотою утворення гнізд Zг, од/с: |
|
|
|
|
Zг = vм /lс. |
(2.31) |
|||
Ураховуючи, що висівний диск для однонасіннєвого (пунктирно- го) висіву має Zк комірок із укладанням у комірку тільки одного зе-
рна, визначаємо секундну подачу насіння диском
Qн′ = |
Zкn |
, |
(2.32) |
60 |
де n — частота обертання диска, хв-1.
Виходячи з умови Zг = Qн′ , отримаємо потрібну відстань між на- сінинами за пунктирної сівби
l = 60vм . |
(2.33) |
н Zкn
Оскільки висівні апарати приводяться в рух від прикочувальних коліс, відстань між насінинами можна виразити залежністю
|
πd |
|
lн = |
|
. |
Zкi(1 − η) |
||
Прирівнявши рівняння (2.33) і (2.34) та врахувавши, що u = πnd60д ; dд = lкπZк ,
(2.34)
(2.35)
133

Розділ 2
отримаємо максимальну швидкість |
vмmax |
висівного агрегату за |
|||
пунктирного висіву, м/с, |
|
|
|
|
|
vмmax = |
umax πd |
, |
(2.36) |
||
ilкZк(1 − η) |
|||||
|
|
|
|||
де umax — максимальна колова швидкість диска по центру комірок, м/с; d — діаметр прикочувального колеса, м; i — передаточне від- ношення від колеса до висівного диска; lк — крок комірок, м; η = 0,03…0,05 — коефіцієнт ковзання прикочувального колеса.
Значення vмmax , як правило, не перевищує 0,25…0,35 м/с.
Робота дискових висівних апаратів точного висіву складається з трьох чергувальних фаз: западання насінин у комірки диска, відби- вання зайвих насінин, виштовхування насінин із комірки.
Западання насінин у комірки диска. Згідно з виразами (2.30)
і (2.36) посів 1 га ріллі певною кількістю насінин із максимально допустимою швидкістю руху агрегату може відбуватися тільки тоді, коли підібраний висівний диск виноситиме насіння кожний своєю коміркою.
Розраховуючи лінійні розміри комірки, слід виходити з того, що в комірку має вміщуватись одна найбільша насінина, але не повинно бути двох найменших насінин. Наприклад, при заповненні круглої комірки насіниною в стоячому положенні цю умову можна записати у такому вигляді:
2δmin > l1 = bmax + k1 , |
(2.37) |
де δmin — мінімальна товщина насінини; l1 |
— довжина комірки; |
bmax — максимальна ширина насінини; k1 — відстань між стінкою
комірки та насіниною.
При визначенні товщини диска (глибини комірки) δ1 для гори- зонтального положення насінини потрібно виконувати умову
2δmin > δ1 = δmax + k2 , |
(2.38) |
де k2 — зазор між верхньою площиною диска та зерном.
У найпоширенішому випадку, без урахування положення насі- нини в комірках, слід виходити з об’ємів насінини
2Vнmin > V > Vнmax , |
(2.39) |
або з їхніх середніх розмірів
23 lminbminδmin > 3 l1b1δ1 > 3 lmaxbmaxδmax ,
134

Основи теорії та розрахунку машин для сівби і садіння
де Vн — об’єм насінини; V, b1 і δ1 — відповідно об’єм, ширина і гли-
бина комірки.
Другим чинником, який зумовлює западання насінин у комірки, є переміщення їх по поверхні висівного диска. Залежно від форми насіння можна прогнозувати або ковзання їх по робочій поверхні, або кочення-ковзання. Захоплюючи насіння, диск, що обертається, надає нижньому шару насіння швидкості, що відрізняється від своєї (але не перевищує її). Нижній шар насіння захоплює верхній і т.д. Унаслідок цього відбувається передача руху від висівного диска до маси насіння в апараті. Для вивчення западання насіння в комірки диска велике значення має його відносна vн, а не абсолютна ин
швидкість, оскільки без відносного переміщення цей процес немож- ливий.
Розглянемозападанняна- сінини еліпсоподібної фор- ми в подовжену комірку. При поодинокому або неве- ликому шарі насіння в на- сіннєвій банці воно западає в той момент, коли центр ваги насінини лежить на краю комірки (рис. 2.2, а). Якщо висота шару насіння в банці значно більша, ніж у
попередньому випадку, що характерно для дискових висівних апара- тів, то на насінину крім сили ваги mg діють сили вертикального Fв і
горизонтального Fг тиску, а також сила тертя fFг (рис. 2.2, б). При
такій дії сил момент западання насінини починається тільки після зміщення його центра ваги відносно краю комірки на певну відстань ∆l . Для різних насінин це значення різне. Так, для насіння буряка
∆l = (0,35…0,45)l. Коли центр ваги насінини буде нижче (або на рів-
ні) від поверхні диска, вона западає в комірку.
Для западання насіння колова швидкість u центра комірок дис- ка має бути тим меншою, чим більші розміри насіння l і δ, коротша довжина комірок l1 і менша абсолютна швидкість насіння ин. За
швидкості посівних агрегатів понад 9 км/год швидкість центрів ко- мірок для насіння буряка становить 0,43 м/с.
Відбиття насіння. Відбивачі відокремлюють насіння в комірках від іншої маси. Найпоширенішими є відбивачі двох типів: важільні (в кукурудзяних і бавовняних сівалках) і роликові (в бурякових сі- валках).
При ковзанні по диску і заповненим коміркам похила кромка зу- ба важільного відбивача має переміщувати масу насіння відносно
135
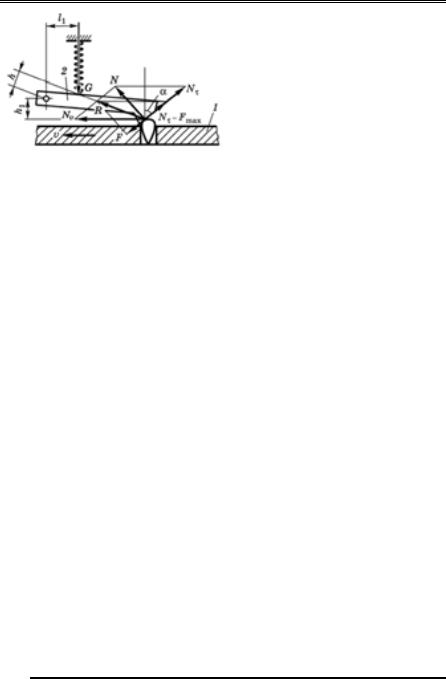
Розділ 2
|
диска у бік, протилежний його |
||||
|
обертанню. При цьому ковзан- |
||||
|
ня насіння по диску зумовлю- |
||||
|
ється |
умовами |
защемлення, |
||
|
тобто |
кутом між передньою |
|||
|
межею зуба відбивача і пло- |
||||
|
щиною диска. Його беруть та- |
||||
|
ким, що дорівнює α ≥ 2ϕ. |
||||
|
Для випадку, показаному на |
||||
|
рис. 2.3, насінини не подрібню- |
||||
Рис. 2.3. Схема роботи важільного |
ватимуть, |
якщо |
двогранний |
||
кут α, утворений площиною |
|||||
відбивача: |
|||||
1 — висівний диск; 2 — важільний |
кромки зуба відбивача 2 і вер- |
||||
підпружинений відбивач |
тикальною |
площиною, буде |
|||
більший, ніж кут тертя ϕ. От- же, α < ϕ. Насіння діє на похилу кромку зуба із силою нормального тиску N. Розкладемо її на дві складові: Nv — за напрямком руху дис-
ка 1 і Nτ — за напрямком кромки зуба відбивача 2.
Силі |
|
Nτ = Ntgα |
(2.40) |
протидіє сила тертя |
|
Fmax = Ntgϕ. |
(2.41) |
Якщо α ≤ ϕ, то Nτ = Fmax .
У цьому разі насінина буде зім’ята, оскільки момент сили G сти- скання пружини, що становить Gl1 , і момент сили Nv, який дорів-
нює Nvh1 , напрямлені в один бік і притискують зуб відбивача до
диска.
Якщо α > ϕ, то сили Nτ − Fmax або N і Fmax утворюють резуль- туючу R1 , момент якої дорівнює Rh. Для того щоб насіння залиша-
лося цілим, момент Rh має бути більшим від моменту Gl1. |
Отже, |
для нормальної роботи відбивача слід зберігати умови |
|
α > ϕ; Rh > Gl. |
(2.42) |
Ураховуючи ці умови, вибирають місце розміщення осі відбива- ча, тиск пружини і кут кромки.
Виштовхування насіння. Насіння видаляється із комірок уна- слідок вільного випадання і примусового виштовхування. На куку- рудзяних і бавовникових сівалках точного висіву найпоширені- шими є важільні, а на бурякових — пластинчасті клинові виштов- хувачі.
136