

- •Передмова
- •1.1.1. Завдання та наукові основи механічного обробітку ґрунту
- •1.1.2. Операції, способи, машини і знаряддя для обробітку ґрунту
- •1.1.3. Ґрунт як об’єкт обробітку
- •1.2.1. Теоретичні основи технологічного процесу оранки
- •1.2.2. Ножі та теорія різання ґрунту лезом
- •1.2.3. Плужні корпуси та взаємодія клину з ґрунтом
- •1.2.5. Визначення параметрів польової дошки
- •1.2.7. Особливості швидкісних робочих поверхонь плужних корпусів
- •1.2.8. Сили, що діють на плужний корпус
- •1.2.9. Тяговий опір плуга
- •1.2.10. Обґрунтування схеми розміщення робочих органів на рамі плуга
- •1.2.11. Умови рівноваги плуга
- •1.3. Теорія та розрахунок дискових ґрунтообробних машин і знарядь
- •1.3.1. Основні геометричні параметри дисків
- •1.3.2. Регульовані технологічні параметри та процес роботи дисків
- •1.3.3. Силова характеристика і тяговий опір дискових робочих органів
- •1.4. Теорія та розрахунок зубових борін
- •1.4.1. Робочі органи і процес роботи зубових борін
- •1.4.2. Розміщення зубів на рамі борони
- •1.4.3. Рівновага і тяговий опір зубової борони
- •1.5. Теорія та розрахунок культиваторів
- •1.5.1. Робочі органи культиваторів та їхні параметри
- •1.5.2. Дія полільних і універсальних лап на коріння бур’янів
- •1.5.3. Взаємне розміщення полільних і універсальних лап
- •1.5.4. Дія розпушувальних лап на ґрунт і їх взаємне розміщення
- •1.5.5. Система кріплення лап до рами та стійкість ходу по глибині
- •1.5.6. Визначення основних параметрів культиваторів
- •1.6.1. Робочі органи фрез, проріджувачів і штангових культиваторів
- •1.6.2. Процес роботи і траєкторія руху робочих органів фрези та проріджувача
- •1.6.3. Основні параметри роботи фрези
- •1.6.4. Витрати потужності для роботи фрези
- •1.6.5. Визначення основних параметрів фрези
- •1.7. Теорія та розрахунок котків
- •1.7.1. Процес дії котка на ґрунт
- •1.7.2. Визначення параметрів котка
- •1.7.3. Опір перекочуванню котка
- •Основи теорії та розрахунку машин для сівби і садіння
- •2.1. Основні властивості насіння
- •2.1.1. Технологічні властивості насіння
- •2.1.2. Закономірності руху насіння
- •2.2. Типи робочих органів сівалок
- •2.2.1. Основи розрахунку котушкових висівних апаратів
- •2.2.2. Основи теорії та розрахунку дискових висівних апаратів
- •2.2.3. Основи теорії та розрахунку пневматичних висівних апаратів
- •2.2.4. Основи теорії сошників
- •2.3. Типи робочих органів машин для садіння
- •2.3.1. Основи теорії картоплесадильних машин
- •2.3.2. Основи теорії машин для садіння розсади
- •Основи теорії та розрахунку машин для внесення добрив
- •3.1. Способи внесення добрив, види добрив та їхні технологічні властивості
- •3.2. Типи робочих органів машин для внесення мінеральних добрив
- •3.2.1. Основи теорії дискових дозувальних апаратів
- •3.2.2. Основи теорії відцентрових розсіювальних дисків
- •3.3. Типи робочих органів машин для внесення органічних добрив
- •3.3.1. Вибір і обґрунтування параметрів конвеєрного дозувального апарата
- •3.3.2. Вибір і обґрунтування параметрів розкидального апарата органічних добрив
- •Основи теорії та розрахунку машин для захисту рослин
- •4.1. Основи теорії розпилення рідин і порошків
- •4.1.1. Механічне розпилення рідин
- •4.1.2. Утворення електрично заряджених аерозолів
- •4.1.3. Розпилення порошків
- •4.1.4. Конденсаційне утворення аерозолів
- •4.1.5. Вплив розмірів краплин на ефективність обприскування і обґрунтування оптимальної дисперсності
- •4.2. Технологічний розрахунок робочих органів обприскувачів
- •4.2.1. Розрахунок параметрів баків і мішалок
- •4.2.2. Розрахунок параметрів насосів
- •4.2.3. Розрахунок параметрів розпилювальних пристроїв
- •4.3. Технологічний розрахунок робочих органів протруювачів
- •4.4. Технологічний розрахунок робочих органів обпилювачів
- •5.1. Подільники і стеблепідіймачі
- •5.1.1. Основи теорії, призначення, типи і застосування подільників
- •5.1.2. Основи теорії, призначення, типи і застосування стеблепідіймачів та гичкопідіймачів
- •5.2. Мотовила
- •5.2.1. Призначення, типи і застосування мотовил
- •5.2.2. Основи теорії та розрахунку мотовил
- •5.3. Різальні апарати
- •5.3.1. Призначення, типи і застосування різальних апаратів
- •5.3.2. Параметри, що впливають на різальну здатність ножа
- •5.3.4. Ротаційні різальні апарати з вертикальною віссю обертання. Типи. Основи теорії та розрахунку
- •5.3.6. Ротаційні різальні апарати з горизонтальною віссю обертання. Основи теорії та розрахунку
- •5.4. Вальцьові апарати
- •5.4.1. Типи і призначення вальцьових апаратів
- •5.4.2. Основи теорії та розрахунку вальцьових апаратів
- •5.5. Подрібнювальні апарати
- •5.5.1. Призначення, типи і застосування подрібнювальних апаратів
- •5.5.2. Основи теорії та розрахунку подрібнювачів кормозбиральних комбайнів
- •5.6. Транспортувальні пристрої жаток
- •5.6.1. Призначення, типи і застосування транспортувальних пристроїв жаток
- •5.6.2. Основи теорії та розрахунку транспортувальних пристроїв жаток
- •5.7. Обчісувальні пристрої
- •5.7.1. Призначення, типи і застосування обчісувальних пристроїв
- •5.7.2. Основи теорії та розрахунку обчісувальних пристроїв
- •5.8. Підбирачі
- •5.8.1. Призначення, типи і застосування підбирачів
- •5.8.2. Основи теорії та розрахунку підбирачів
- •Основи теорії та розрахунку робочих органів молотарок зернозбиральних комбайнів
- •6.1. Молотильно-сепарувальні пристрої
- •6.2. Соломовідокремлювачі
- •6.2.1. Призначення і типи соломовідокремлювачів
- •6.2.2. Основи теорії та розрахунку соломовідокремлювачів
- •6.3. Очисники зерна
- •6.3.1. Призначення, типи, параметри і режим роботи очисників зерна
- •6.4. Домолочувальні пристрої
- •6.4.1. Призначення, типи, параметри і режим роботи домолочувальних пристроїв
- •6.5. Бункери для зерна
- •6.5.1. Елементи конструкції і параметри бункерів для зерна
- •6.5.2. Тривалість заповнення і розвантаження бункера
- •6.6. Продуктивність і пропускна здатність комбайна
- •Основи теорії та розрахунку робочих органів для згрібання і пресування сіна
- •7.1. Типи робочих органів і процес згрібання сіна
- •7.2. Обґрунтування параметрів і режимів роботи поперечних граблів
- •7.4.1. Типи робочих органів пресів
- •7.4.2. Обґрунтування параметрів пресувальної камери
- •Основи теорії робочих процесів машин для збирання кукурудзи на зерно
- •8.2. Основні робочі органи кукурудзозбиральних машин
- •8.4. Пропускна здатність і швидкість обертання відокремлювальних вальців
- •8.5.1. Вибір розмірів і частоти обертання очисних вальців
- •Основи теорії та розрахунку машин для післязбиральної обробки зерна
- •9.1. Принципи очищення і сортування зерна
- •9.2. Способи очищення і сортування зерна
- •9.3. Фізико-механічні властивості зернових сумішей
- •9.3.1. Геометричні розміри насіння
- •9.3.2. Аеродинамічні властивості зернових сумішей
- •9.3.3. Інші властивості зернових сумішей
- •9.4. Робота плоских решіт
- •9.4.1. Умови переміщення матеріалу на решеті, що коливається
- •9.4.2. Умови проходження зерна крізь отвори решета
- •9.4.3. Повнота розділення зерна і режим роботи решіт
- •9.4.4. Кінематичний режим роботи решіт
- •9.4.5. Навантаження на решета та їх продуктивність
- •9.5. Робота циліндричного трієра
- •9.5.1. Теоретичні основи роботи трієра
- •9.5.2. Випадання зерна з комірки трієра і установлення приймального лотока
- •9.5.3. Режим роботи циліндричного трієра
- •9.5.4. Продуктивність трієра
- •9.6. Фрикційне очищення
- •9.7. Повітряні системи
- •9.7.1. Робочий процес у вертикальному каналі з нагнітанням повітря
- •9.7.2. Робочий процес похилого повітряного потоку
- •9.8. Теорія та розрахунок вентиляторів
- •9.8.1. Типи вентиляторів
- •9.8.2. Основне рівняння вентилятора
- •9.8.3. Вибір вентилятора
- •9.9. Основи теорії сушіння зерна
- •9.9.1. Властивості зерна як об’єкта сушіння
- •9.9.2. Загальна схема процесу сушіння
- •9.9.3. Режим роботи і продуктивність сушарок
- •Основи теорії та розрахунку бурякозбиральних машин
- •10.2. Основи розрахунку параметрів апаратів для зрізування гички та очищення головок коренеплодів
- •10.2.1. Апарати для зрізування гички
- •10.2.2. Очисники головок коренеплодів цукрових буряків на корені
- •10.3. Типи та основні параметри викопувальних робочих органів
- •10.3.1. Лемішні викопувальні робочі органи
- •10.3.2. Дискові викопувальні робочі органи
- •10.3.3. Роторні викопувальні робочі органи
- •10.4. Вибір, обґрунтування і розрахунок основних параметрів очищувальних робочих органів
- •Основи теорії та розрахунку машин для збирання картоплі
- •11.1. Машини і способи збирання картоплі
- •11.3. Типи та основні параметри підкопувальних робочих органів
- •11.4. Вибір та обґрунтування основних параметрів пруткового елеватора і грохота
- •11.5. Типи сортувальних робочих органів
- •11.6. Визначення основних параметрів сортувальної роликової поверхні
- •Основи теорії та розрахунку машин для збирання льону
- •12.1. Характеристика льону як об’єкта збирання
- •12.2. Машини і способи збирання льону
- •12.3.1. Типи бральних апаратів
- •12.3.2. Основи теорії бральних апаратів
- •12.4. Льонозбиральні комбайни
- •12.4.1. Типи і робочий процес льонозбиральних комбайнів
- •12.4.2. Вибір та обґрунтування основних параметрів обчісувальних апаратів
- •Список використаної літератури
Основи теорії та розрахунку косарок, косарок-плющилок …
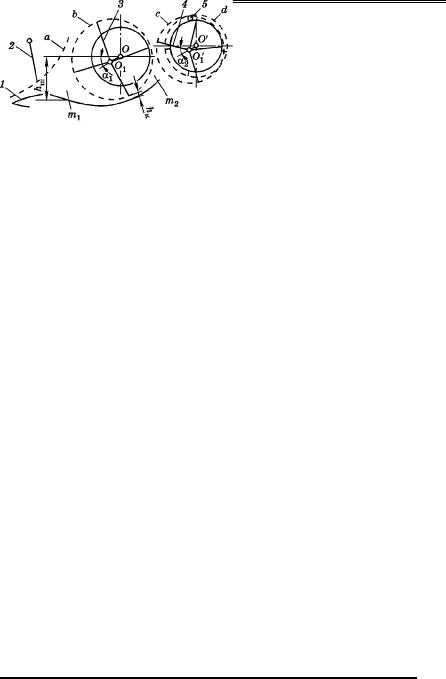
Зі збільшенням висоти hш розміщення шнека від-
носно днища жатки «мерт- ва» зона m1 дещо збільшу-
ється, проте збільшується також відстань hк, що бажа-
но при збиранні довгостеб- лових і високоврожайних культур. У разі зменшення
кута α1 нахилу осі O1 обер-
тання пальців 3 (поворотом колінчастої осі ОО1) від-
стань hк також збільшуєть-
Рис. 5.51. Траєкторії кінців пальців мото- вила (а), шнека (b), бітера проставки (с), планок плаваючого конвеєра (d):
1 — різальний апарат; 2, 3 і 4 — пальці відпо- відно мотовила, шнека, бітера; 5 — планка плаваючого конвеєра
ся. Положення шнека по висоті й виліт пальців із
циліндричного корпусу шнека вибирають таким, щоб hк = 5…15 мм. За наявності пальцьового бітера проставки «мертва» зона m2
дещо зменшується. Лінійну швидкість спіралей вибирають, як пра- вило, 4,8…5,8 м/с, при цьому осьова швидкість становить 1,1…1,7 м/с. Лінійні швидкості планок плаваючого конвеєра більші від лінійних швидкостей пальців бітера або шнека. Це забезпечує розтягування шару хлібної маси, що призводить до рівномірнішої подачі її в молотарку.
Потужність, яка потрібна для приведення в дію бітера простав- ки, становить 3,6 кВт, а конвеєра похилої камери — 2,2 кВт (для комбайна КЗС-9-1).
5.7. Обчісувальні пристрої
5.7.1.Призначення, типи і застосування обчісувальних пристроїв
Ідею хліборобів Давньої Галлії (77 р. н.е.) збирання хлібів мето- дом обчісування колосків чи волоті не відкидали шукачі нового на кожному етапі розвитку зернозбиральних машин.
Так, у 1843 р. в Австралії запропонували комбайн (стрипер), в якому суцвіття хлібів обчісувалися гребінчастим пристроєм. У 1868 р. в Росії А.Р. Власенко виготовив і випробував комбайн такого самого типу. Це один із напрямів зниження витрат енергії на обмо- лот, зменшення травмування зерна та збільшення продуктивності комбайна.
Нині обчісувальні пристрої розміщують на жатці або комбайні. Вони бувають двох типів: з обчісуванням у потоці зрізаного хлібо-
263

Розділ 5
|
стою та на корені. Перші з |
|
|
них працюють за принципом |
|
|
обчісування коробочок льону |
|
|
на льонозбиральних |
ком- |
|
байнах. |
|
|
Жатки для збирання зер- |
|
|
нових культур методом обчі- |
|
|
сування суцвіття на |
корені |
|
мають ширину захвату 4,2; |
|
|
4,8 і 6,0 м. Основним робо- |
|
|
чим органом такої жатки є |
|
|
барабан 2 (рис. 5.52, а) діа- |
|
|
метром 540 мм з частотою |
|
|
обертання 400…600 об/хв, на |
|
|
якому розміщено вісім рядів |
|
|
планок з пластмасових зубів |
|
|
3 спеціального профілю. Під |
|
|
час руху комбайна кожух 1 |
|
|
(регульований по висоті) на- |
|
|
хиляє стебла, барабан, обер- |
|
|
таючись за ходом годинни- |
|
|
кової стрілки, обчісує своїми |
|
|
зубами колоски чи волоть і |
|
Рис. 5.52. Схеми обчісувальних пристро- |
спрямовує їх на прогумова- |
|
їв на корені: |
ний конвеєр 4, а той шне- |
|
а — з доробкою вороху в молотарці комбайна; |
||
б — з доробкою вороху в пневмоінерційній |
ком 5 — у молотарку ком- |
|
системі; 1 — кожух; 2 — барабан; 3 — зуб |
байна. |
|
планки; 4 — конвеєр; 5 — шнек; А — комірка |
Порівнянні випробування |
|
такої і класичної жаток за- свідчують, що втрати зерна при збиранні пшениці становлять від- повідно 127 і 280 кг/га, ячменю — 80 і 300 кг/га. При збиранні поле- глих і зволожених хлібів різниця у втратах зменшується. Продукти- вність комбайна збільшується з 9 до 16 т/год.
В інших конструкціях жаток з обчісуванням суцвіть на корені (рис. 5.52, б) ворох підхоплюється повітряним потоком і спрямову- ється в молотильну камеру, а потім — у бункер чи візок, що приче- плений до машини.
Випробування обчісувальних пристроїв з обчісування колосків чи волоті на корені підтвердили можливість їх практичного застосуван- ня як у комбайновій, так і в індустріально-потоковій технологіях. Розробки, направлені на зменшення втрат урожаю при обчісуванні, пошуки ефективних засобів обмолоту і сепарацію обчісаного вороху та збирання обчісаних стебел є нині першочерговим завданням.
264

Основи теорії та розрахунку косарок, косарок-плющилок …
5.7.2. Основи теорії та розрахунку обчісувальних пристроїв
Траєкторія руху точок зуба обчісувального барабана аналогіч- на траєкторії точок руху ножів подрібнювального апарата косарки- подрібнювача (див. рис. 5.40 і рівняння (5.83)). Тобто зуб обчісуваль- ного барабана здійснює складний рух (рис. 5.53): переносний зі швид- кістю vм машини і відносний з
кутовою швидкістю ω. Кожна точка зуба описує циклоїду.
Оптимальна висота установлення вала обчісу-
вального барабана над рівнем поля. Розглянемо взаємодію зубів із стеблами в зоні обчісу- вання.
Під час руху машини обчі- сувальні зуби відокремлюють певну смугу рослин, що дорів- нює відстані між ними. Пере- міщуючись між гранями зубів, стебла входять у комірку А (див. рис. 5.52). Коло радіусом r (див. рис. 5.53), по якому руха- ється центр комірки планки
барабана 2, торкається прямостоячого стебла АС у точці B (поло- ження І). Завдяки руху машини барабан відхиляє стебла по її ходу. При цьому точка стикання стебла з колом віддаляється від вершини колоса. Максимальне її віддалення відповідає точці B1 (положення
ІІ). Потім точка дотику наближається до вершини колоса. Обчісу- вання продовжується до положення ІІІ.
Довжину l0 зони обчісування, яка дорівнює довжині відрізка B1C1 , можна визначити з геометричних передумов:
l0 = B1C1 = (lp – h)/(sinγ + rctgγ),
де h — висота установлення вала обчісувального барабана над рів- нем поля.
Максимальна довжина l0max зони обчісування залежить від ку-
та γ, який визначають із залежності cosγ = r/h. Ураховуючи наведені залежності, маємо
l |
= l −(h2 |
− r2 )/ h2 − r2 . |
(5.124) |
0 max |
p |
|
|
Довжина l0max зменшується зі збільшенням h. Із зменшенням h прочісується не тільки колос завдовжки lк, а й значна довжина стеб-
265

Розділ 5
ла. Ось чому в обчісаному воросі міститься багато незернової части- ни врожаю.
Обчісувальний барабан має так взаємодіяти зі стеблами,
щоб l0 max = lк, тобто ε = l0 max/lк= 1.
Тоді оптимальна висота установлення вала барабана над рівнем
поля, тобто яка відповідає ε =1, дорівнюватиме |
|
|||
h = |
(l |
−l )2 |
+ r2 . |
(5.125) |
0 |
p |
к |
|
|
Число зубів обчісувального барабана, що діють на колос у межах його довжини, істотно впливає на якісні показники обчісува- льного пристрою. Зі збільшенням їх кількості знижуються втрати зерна від недообчісування. Так, при втратах δ ≤ 0,5 % число зубів
становить 8 – 15. Більші значення відповідають обчісуванню коло- сових культур, менші — рису.
Число зубів m залежить від шляху L, який проходить машина
від початку дії на колос (положення І) до кінця обчісування (поло- ження ІІІ), при якому
cos γ |
= (hr + l |
l2 − h2 |
+ r2 )/(l2 |
+ r2 ). |
1 |
p |
p |
p |
|
Із рис. 5.53 маємо |
|
|
|
|
|
L = lp cosγ1 + r(1 – sinγ1). |
(5.126) |
||
Тоді m визначаємо за залежністю |
|
|
||
|
m = Lnz/vм, |
(5.127) |
||
де n — частота обертання барабана; z — кількість планок на бара- бані; vм — швидкість машини.
Кінематичний режим роботи λ обчісувального барабана — це відношення колової швидкості и центра комірки барабана до швидкості машини, тобто λ = и/vм. Оскільки и = 2πnr, vм визначимо
із залежності (5.127), то отримаємо
λ = 2πmr/(Lz). |
(5.128) |
Експериментальні дослідження показують, що зі збільшенням кінематичного режиму роботи поліпшується чистота обчісування, проте збільшуються втрати зерна внаслідок розкидання його обчі- сувальним барабаном, а також засміченість вороху незерновою час- тиною врожаю. При нерівномірному за довжиною і полеглому стеб- лостої слід зменшувати висоту h і збільшувати λ.
Мінімальні втрати зерна через недообчісування δ ≤ 0,5 % і частка соломистих частин в обчісаному воросі ψ = 0,25…0,35 відповідають кінематичному режиму роботи λ = 5…10.
266