


Основи теорії та розрахунку косарок, косарок-плющилок …
Розділ 5
ОСНОВИ ТЕОРІЇ ТА РОЗРАХУНКУ КОСАРОК, КОСАРОК-ПЛЮЩИЛОК, ОБЧІСУВАЛЬНИХ ПРИСТРОЇВ, ПОДРІБНЮВАЛЬНИХ АПАРАТІВ, ЖАТОК І ПІДБИРАЧІВ
5.1. Подільники і стеблепідіймачі
5.1.1.Основи теорії, призначення, типи і застосування подільників
Подільниками оснащують косарки, валкові жатки, жатки зерно- збиральних і кормозбиральних комбайнів, льонобралки та інші збиральні машини.
Подільник, наприклад жатки зернозбирального комбайна, вста- новлений з боку нескошеного поля, називають польовим, а з боку скошеного — внутрішнім. Внутрішній подільник є орієнтиром під час руху жатки відносно попереднього проходу. Якщо жатку вико- ристовують як прокосчик, то з обох боків на жатку встановлюють польовий подільник.
Польові подільники призначені для відокремлення смуги стебел (по ширині захвату жатки) від загального хлібостою і часткового підведення стебел до різального апарата.
Подільники, встановлені на льонобралках, розділяють стеблостій на смуги і підводять стебла до брального апарата.
Подільники поділяють на пасивні, напівактивні й активні. Від правильного вибору типу подільника і його налагодження залежать не тільки надійність технологічного процесу машини, а й втрати врожаю.
Пасивні подільники жаток і льонобралок схематично показано на рис. 5.1.
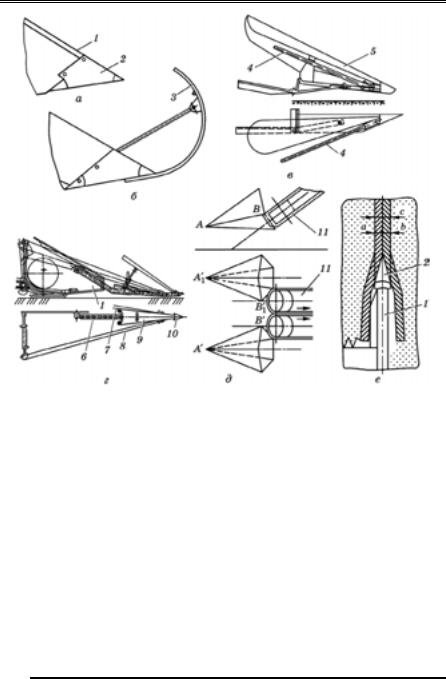
Клиновий подільник (рис. 5.1, а) має вигляд носка 2, подібного до конуса обтічної форми, і закріплюється на боковинах 1 жатки. Його застосовують на прямостоячому стеблостої завдовжки 60…80 см. За таких самих умов роботи застосовують також клиновий подільник із зовнішнім стеблевідводом (рис. 5.1, в).
Прутковий подільник (рис. 5.1, б) установлюють при збиранні довгостеблових культур.
195
Розділ 5
Рис. 5.1. Схеми пасивних подільників:
а — клиновий; б — прутковий; в — клиновий із зовнішнім стеблевідводом; г — тор- педний; д — льонобралка; е — схема роботи клинового подільника; 1 — боковина жатки; 2 — носок; 3 — пруток; 4 — зовнішній стеблевідвід; 5 — корпус (центральне перо); 6 — основна труба; 7 — внутрішній стеблевідвід; 8 — зовнішній стеблевідвід; 9 — центральне перо; 10 — башмак; 11 — бральний апарат
При збиранні довгостеблових і полеглих культур застосовують торпедні подільники (рис. 5.1, г) з регульованими внутрішнім та зовнішнім стеблевідводами й центральним пером (корпусом).
Подільники льонобралок — пруткові, виготовлені у вигляді п’ятигранного клина. Вони носками A′ і A1′ (рис. 5.1, д) входять у
стеблостій і робочими кромками A′B′ і A1′B1′ відхиляють стебла і
спрямовують їх до брального апарата 11.
Процес роботи клинового подільника відбувається так. Під час руху, наприклад, жатки носок 2 подільника (рис. 5.1, е) діє на стеб- ла, розміщені в смузі, ширина с якої дорівнює ширині подільника. При цьому похилені стебла піднімаються і смуга розділяється на дві
196

Основи теорії та розрахунку косарок, косарок-плющилок …
частини: а і b. Стебла, що знаходяться в частині а, спрямовуються до різального апарата, а в частині b відхиляються від боковини 1 жатки.
Прутковий і клиновий із зовнішнім стеблевідводом та торпедний подільники (рис. 5.1, б – г) працюють аналогічно. Вони лише роз- ширюють зону дії на стебла в бік різального апарата і поля.
Взаємне розміщення пасивного подільника і вала конвеє-
ра валкової жатки. Осі симетрії подільника і вала конвеєра мають розміщуватися на одній лінії (рис. 5.2), тобто зміщення ε = 0. Змі-
щення подільника в бік поля (ε > 0) знижує захоплювальну здат- ність конвеєра, зрізані стебла зависають на брусі й не потрапляють у валок, що призводить до втрат урожаю. Зміщення подільника в бік середини конвеєра (ε < 0) може спричинити захоплення планка- ми конвеєра ще не зрізаних стебел, вибивання зерна із колосків або обривання бобів.
Рис. 5.2. Взаємне розміщення подільника і вала конвеєра
Взаємодія пасивного подільника зі стеблами. Як зазначало-
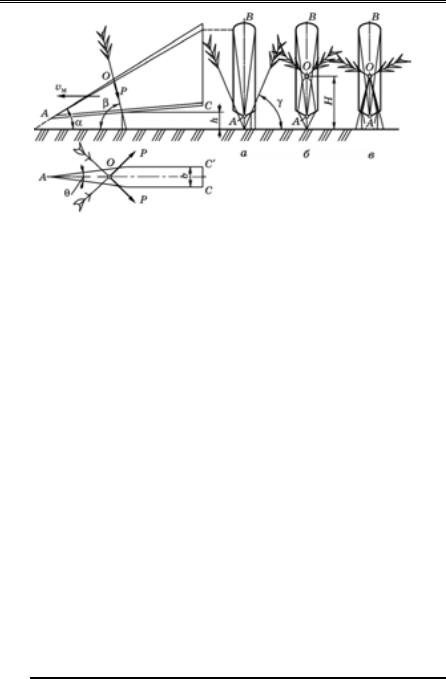
ся, на збиральних машинах застосовують пасивні подільники, які мають форму три- або п’ятигранного клина. Під час руху машини в напрямку vм (рис. 5.3, а) носок клина проникає між стеблами і роз-
совує їх. Найгіршою умовою слід вважати збіг площини стояння сте- бел з осьовою лінією подільника. При цьому стебла під дією клина носка зміщуються на кут γ убік і у міру руху вперед нахиляються на кут β. Таке розділення стеблостою може відбуватися, якщо немає переплутаних стебел і кут β > 15°. При β ≥ 15° одиноке стебло може зламатися, що призведе до втрати врожаю.
197
Розділ 5
Рис. 5.3. Взаємодія пасивного подільника зі стеблами:
а — непереплутаними, що розміщуються в площині, яка збігається з осьовою лінією подільника; б — переплутаними, що розміщуються в площині, яка збігається з осьо- вою лінією подільника; в — переплутаними, що не розміщуються в площинах, які не збігаються з осьовою лінією подільника
Інший процес відбувається під час розділення переплутаних сте- бел чи стеблової маси (рис. 5.3, б, в). Характерно, що стебла пере- плутуються не у кореневій частині, а на певній висоті H. У цьому разі подільник своїм носком А спочатку легко проникає в стеблостій і, діючи кромками AC і AC′ підошви, розсовує його. Проте стебла не відхиляються, а охоплюють корпус подільника. У міру руху поділь- ника вперед вузол О переплутаних стебел, спираючись на кромку АВ, намагається зміститися по ньому вгору, дедалі більше затягую- чись під дією сил P, що напрямлені вниз уздовж стебла.
Сили Р, намагаючись витягнути стебла із вузла О, сприяють їх розділенню. Одночасно вони розтягують стебла, намагаючись розі- рвати їх або висмикнути з ґрунту.
Максимальне значення кута θ залежить від допустимої шири- ни b підошви подільника. При широкій підошві подільник підминає стебла, що призводить до втрат не зрізаним колосом, трав’яною ма- сою або невибраними стеблами льону. При цьому, якщо подільник установлюють на великій відстані h від поверхні поля, а стебла, що збираються, допускають значне відхилення до втрати ними пруж- них властивостей, то підошва може бути ширшою. В умовах серед- ньо- і важкороздільної стеблової маси слід застосовувати подільник з вузькою підошвою. Проте створити міцну конструкцію такого по- дільника досить важко.
Для нормальної роботи подільника вузол О стебел має проковзу- вати вгору по кромці АВ, зберігаючи сталим кут β. Тому кут α нахи- лу цієї кромки до горизонту беруть 30…35°.
198

Основи теорії та розрахунку косарок, косарок-плющилок …
Винос подільника відносно різального апарата вибирають міні- мальним, щоб не знижувалась маневреність збирального апарата, але достатнім, щоб процес розділення стебел закінчувався до почат- ку їх зрізування. Винос залежить від довжини рослин, ступеня їх переплутаності, кутів α і θ подільника, напрямку руху машини від- носно полеглості стебел тощо. Як правило, цей параметр вибирають експериментально залежно від призначення збиральної машини.
Стан робочих поверхонь пасивного подільника також істотно впливає на якість його роботи. Тому такі поверхні виконують гладе- нькими, що запобігає накопиченню стеблової маси на подільнику.
Напівактивні й активні подільники застосовують тоді, коли пасивні подільники нероботоздатні, що характерно для важких умов збирання кормових культур, хлібів тощо. Схеми таких поділь- ників показано на рис. 5.4.
Напівактивний подільник застосовують для розділення переплу- таних стебел у кормозбиральних комбайнах. Корпус 2 (рис. 5.4, а) такого подільника, діючи на смугу стебел, що дорівнює ширині кор- пусу, розділяє їх так само, як і пасивний клиновий подільник. Диск 1, жорстко закріплений на валу мотовила, обертаючись, розрі- зує переплутані стебла.
Активні подільники бувають двох типів: різальні, фронтальна кромка яких обладнана різальним апаратом; активно-роздільні, фронтальна кромка яких обладнана органом, що переміщує пере- плутаний вузол вгору по кромці, розтягуючи і розриваючи його.
Активний подільник із двоножовим різальним апаратом (з од- ним рухомим ножем) (рис. 5.4, б) застосовують на валкових жатках і силосозбиральних комбайнах. Застосування таких подільників дає можливість нахиляти його кромку під великим кутом (до 65°), що значно зменшує його винос. Ніж приводиться в рух кривошипно- шатунним механізмом з лінійною швидкістю 1,5…2,5 м/с.
Маятниковий подільник (рис. 5.4, в) розділяє стебла, розриваючи або перерізаючи їх. При обертанні мотовила ніж здійснює колива- льний рух. Довжину подільника можна регулювати перестановкою ножа вздовж робочого органа.
Шнекові подільники виконують у вигляді циліндра (діаметром 160…200 мм) або зрізаного конуса (діаметрами 70…90 і 180…220 мм) з невисоким (35…40 мм) одноходовим витком (рис. 5.4, г). Крок витка 450…500 мм. Лінійна швидкість циліндричного подільника по зов- нішній кромці витка 2,2…2,6 м/с, а конусного в нижній частині 1,6…2,2 м/с, у верхній — 3,2…4,5 м/с. Кут нахилу подільника до го- ризонту 45…70°.
У нижній частині шнекового подільника встановлюють пасивний подільник у вигляді гострого тригранного клина 8.
Ланцюговий, або пасовий, подільник виконаний у вигляді не- скінченного ланцюга (рис. 5.4, д) або паса з ланками чи кулачками.
199
Розділ 5
Рис. 5.4. Схеми напівактивних і активних подільників:
а — напівактивний; б — активний ножовий; в — маятниковий; г — шнековий; д — лан- цюговий; е — комбінований; 1 — диск; 2 — корпус; 3 — різальний апарат; 4 — мотовило; 5 — ніж; 6 — кривошип; 7 — шнек; 8 — клин; 9 — ланцюг; 10 — різальний апарат; 11 — перший каскад; 12 — другий каскад; 13 — кривошипно-шатунний механізм
Вони переміщують переплутаний вузол стебел вгору по кромці, роз- тягуючи і розриваючи його так само, як і шнекові подільники.
Режим роботи активного подільника має бути таким, щоб його фронтальна кромка не накопичувала стебла, а активний орган (шнек, ланцюг, пас) діяв на них з малим імпульсом.
Для виконання цієї умови потрібно, щоб горизонтальна складова швидкості ист переміщення переплутаних стебел дорівнювала
200