

- •Передмова
- •1.1.1. Завдання та наукові основи механічного обробітку ґрунту
- •1.1.2. Операції, способи, машини і знаряддя для обробітку ґрунту
- •1.1.3. Ґрунт як об’єкт обробітку
- •1.2.1. Теоретичні основи технологічного процесу оранки
- •1.2.2. Ножі та теорія різання ґрунту лезом
- •1.2.3. Плужні корпуси та взаємодія клину з ґрунтом
- •1.2.5. Визначення параметрів польової дошки
- •1.2.7. Особливості швидкісних робочих поверхонь плужних корпусів
- •1.2.8. Сили, що діють на плужний корпус
- •1.2.9. Тяговий опір плуга
- •1.2.10. Обґрунтування схеми розміщення робочих органів на рамі плуга
- •1.2.11. Умови рівноваги плуга
- •1.3. Теорія та розрахунок дискових ґрунтообробних машин і знарядь
- •1.3.1. Основні геометричні параметри дисків
- •1.3.2. Регульовані технологічні параметри та процес роботи дисків
- •1.3.3. Силова характеристика і тяговий опір дискових робочих органів
- •1.4. Теорія та розрахунок зубових борін
- •1.4.1. Робочі органи і процес роботи зубових борін
- •1.4.2. Розміщення зубів на рамі борони
- •1.4.3. Рівновага і тяговий опір зубової борони
- •1.5. Теорія та розрахунок культиваторів
- •1.5.1. Робочі органи культиваторів та їхні параметри
- •1.5.2. Дія полільних і універсальних лап на коріння бур’янів
- •1.5.3. Взаємне розміщення полільних і універсальних лап
- •1.5.4. Дія розпушувальних лап на ґрунт і їх взаємне розміщення
- •1.5.5. Система кріплення лап до рами та стійкість ходу по глибині
- •1.5.6. Визначення основних параметрів культиваторів
- •1.6.1. Робочі органи фрез, проріджувачів і штангових культиваторів
- •1.6.2. Процес роботи і траєкторія руху робочих органів фрези та проріджувача
- •1.6.3. Основні параметри роботи фрези
- •1.6.4. Витрати потужності для роботи фрези
- •1.6.5. Визначення основних параметрів фрези
- •1.7. Теорія та розрахунок котків
- •1.7.1. Процес дії котка на ґрунт
- •1.7.2. Визначення параметрів котка
- •1.7.3. Опір перекочуванню котка
- •Основи теорії та розрахунку машин для сівби і садіння
- •2.1. Основні властивості насіння
- •2.1.1. Технологічні властивості насіння
- •2.1.2. Закономірності руху насіння
- •2.2. Типи робочих органів сівалок
- •2.2.1. Основи розрахунку котушкових висівних апаратів
- •2.2.2. Основи теорії та розрахунку дискових висівних апаратів
- •2.2.3. Основи теорії та розрахунку пневматичних висівних апаратів
- •2.2.4. Основи теорії сошників
- •2.3. Типи робочих органів машин для садіння
- •2.3.1. Основи теорії картоплесадильних машин
- •2.3.2. Основи теорії машин для садіння розсади
- •Основи теорії та розрахунку машин для внесення добрив
- •3.1. Способи внесення добрив, види добрив та їхні технологічні властивості
- •3.2. Типи робочих органів машин для внесення мінеральних добрив
- •3.2.1. Основи теорії дискових дозувальних апаратів
- •3.2.2. Основи теорії відцентрових розсіювальних дисків
- •3.3. Типи робочих органів машин для внесення органічних добрив
- •3.3.1. Вибір і обґрунтування параметрів конвеєрного дозувального апарата
- •3.3.2. Вибір і обґрунтування параметрів розкидального апарата органічних добрив
- •Основи теорії та розрахунку машин для захисту рослин
- •4.1. Основи теорії розпилення рідин і порошків
- •4.1.1. Механічне розпилення рідин
- •4.1.2. Утворення електрично заряджених аерозолів
- •4.1.3. Розпилення порошків
- •4.1.4. Конденсаційне утворення аерозолів
- •4.1.5. Вплив розмірів краплин на ефективність обприскування і обґрунтування оптимальної дисперсності
- •4.2. Технологічний розрахунок робочих органів обприскувачів
- •4.2.1. Розрахунок параметрів баків і мішалок
- •4.2.2. Розрахунок параметрів насосів
- •4.2.3. Розрахунок параметрів розпилювальних пристроїв
- •4.3. Технологічний розрахунок робочих органів протруювачів
- •4.4. Технологічний розрахунок робочих органів обпилювачів
- •5.1. Подільники і стеблепідіймачі
- •5.1.1. Основи теорії, призначення, типи і застосування подільників
- •5.1.2. Основи теорії, призначення, типи і застосування стеблепідіймачів та гичкопідіймачів
- •5.2. Мотовила
- •5.2.1. Призначення, типи і застосування мотовил
- •5.2.2. Основи теорії та розрахунку мотовил
- •5.3. Різальні апарати
- •5.3.1. Призначення, типи і застосування різальних апаратів
- •5.3.2. Параметри, що впливають на різальну здатність ножа
- •5.3.4. Ротаційні різальні апарати з вертикальною віссю обертання. Типи. Основи теорії та розрахунку
- •5.3.6. Ротаційні різальні апарати з горизонтальною віссю обертання. Основи теорії та розрахунку
- •5.4. Вальцьові апарати
- •5.4.1. Типи і призначення вальцьових апаратів
- •5.4.2. Основи теорії та розрахунку вальцьових апаратів
- •5.5. Подрібнювальні апарати
- •5.5.1. Призначення, типи і застосування подрібнювальних апаратів
- •5.5.2. Основи теорії та розрахунку подрібнювачів кормозбиральних комбайнів
- •5.6. Транспортувальні пристрої жаток
- •5.6.1. Призначення, типи і застосування транспортувальних пристроїв жаток
- •5.6.2. Основи теорії та розрахунку транспортувальних пристроїв жаток
- •5.7. Обчісувальні пристрої
- •5.7.1. Призначення, типи і застосування обчісувальних пристроїв
- •5.7.2. Основи теорії та розрахунку обчісувальних пристроїв
- •5.8. Підбирачі
- •5.8.1. Призначення, типи і застосування підбирачів
- •5.8.2. Основи теорії та розрахунку підбирачів
- •Основи теорії та розрахунку робочих органів молотарок зернозбиральних комбайнів
- •6.1. Молотильно-сепарувальні пристрої
- •6.2. Соломовідокремлювачі
- •6.2.1. Призначення і типи соломовідокремлювачів
- •6.2.2. Основи теорії та розрахунку соломовідокремлювачів
- •6.3. Очисники зерна
- •6.3.1. Призначення, типи, параметри і режим роботи очисників зерна
- •6.4. Домолочувальні пристрої
- •6.4.1. Призначення, типи, параметри і режим роботи домолочувальних пристроїв
- •6.5. Бункери для зерна
- •6.5.1. Елементи конструкції і параметри бункерів для зерна
- •6.5.2. Тривалість заповнення і розвантаження бункера
- •6.6. Продуктивність і пропускна здатність комбайна
- •Основи теорії та розрахунку робочих органів для згрібання і пресування сіна
- •7.1. Типи робочих органів і процес згрібання сіна
- •7.2. Обґрунтування параметрів і режимів роботи поперечних граблів
- •7.4.1. Типи робочих органів пресів
- •7.4.2. Обґрунтування параметрів пресувальної камери
- •Основи теорії робочих процесів машин для збирання кукурудзи на зерно
- •8.2. Основні робочі органи кукурудзозбиральних машин
- •8.4. Пропускна здатність і швидкість обертання відокремлювальних вальців
- •8.5.1. Вибір розмірів і частоти обертання очисних вальців
- •Основи теорії та розрахунку машин для післязбиральної обробки зерна
- •9.1. Принципи очищення і сортування зерна
- •9.2. Способи очищення і сортування зерна
- •9.3. Фізико-механічні властивості зернових сумішей
- •9.3.1. Геометричні розміри насіння
- •9.3.2. Аеродинамічні властивості зернових сумішей
- •9.3.3. Інші властивості зернових сумішей
- •9.4. Робота плоских решіт
- •9.4.1. Умови переміщення матеріалу на решеті, що коливається
- •9.4.2. Умови проходження зерна крізь отвори решета
- •9.4.3. Повнота розділення зерна і режим роботи решіт
- •9.4.4. Кінематичний режим роботи решіт
- •9.4.5. Навантаження на решета та їх продуктивність
- •9.5. Робота циліндричного трієра
- •9.5.1. Теоретичні основи роботи трієра
- •9.5.2. Випадання зерна з комірки трієра і установлення приймального лотока
- •9.5.3. Режим роботи циліндричного трієра
- •9.5.4. Продуктивність трієра
- •9.6. Фрикційне очищення
- •9.7. Повітряні системи
- •9.7.1. Робочий процес у вертикальному каналі з нагнітанням повітря
- •9.7.2. Робочий процес похилого повітряного потоку
- •9.8. Теорія та розрахунок вентиляторів
- •9.8.1. Типи вентиляторів
- •9.8.2. Основне рівняння вентилятора
- •9.8.3. Вибір вентилятора
- •9.9. Основи теорії сушіння зерна
- •9.9.1. Властивості зерна як об’єкта сушіння
- •9.9.2. Загальна схема процесу сушіння
- •9.9.3. Режим роботи і продуктивність сушарок
- •Основи теорії та розрахунку бурякозбиральних машин
- •10.2. Основи розрахунку параметрів апаратів для зрізування гички та очищення головок коренеплодів
- •10.2.1. Апарати для зрізування гички
- •10.2.2. Очисники головок коренеплодів цукрових буряків на корені
- •10.3. Типи та основні параметри викопувальних робочих органів
- •10.3.1. Лемішні викопувальні робочі органи
- •10.3.2. Дискові викопувальні робочі органи
- •10.3.3. Роторні викопувальні робочі органи
- •10.4. Вибір, обґрунтування і розрахунок основних параметрів очищувальних робочих органів
- •Основи теорії та розрахунку машин для збирання картоплі
- •11.1. Машини і способи збирання картоплі
- •11.3. Типи та основні параметри підкопувальних робочих органів
- •11.4. Вибір та обґрунтування основних параметрів пруткового елеватора і грохота
- •11.5. Типи сортувальних робочих органів
- •11.6. Визначення основних параметрів сортувальної роликової поверхні
- •Основи теорії та розрахунку машин для збирання льону
- •12.1. Характеристика льону як об’єкта збирання
- •12.2. Машини і способи збирання льону
- •12.3.1. Типи бральних апаратів
- •12.3.2. Основи теорії бральних апаратів
- •12.4. Льонозбиральні комбайни
- •12.4.1. Типи і робочий процес льонозбиральних комбайнів
- •12.4.2. Вибір та обґрунтування основних параметрів обчісувальних апаратів
- •Список використаної літератури
Розділ 9
9.5.4. Продуктивність трієра
Існують різні підходи до визначення продуктивності трієра, але найбільш простий і точний метод ґрунтується на використанні питомо- го навантаження на одиницю площі коміркової поверхні (табл. 9.4):
Q = q0πDL, |
(9.26) |
де q0 — питома продуктивність, кг/(год•м2); D — діаметр трієра, м; L — довжина трієра, м.
Таблиця 9.4. Питома продуктивність для основних культур
Культура |
Пшениця |
Жито |
Ячмінь |
Овес |
Гречка |
q0, кг/(год•м2) |
650…850 |
600…750 |
500…600 |
350…400 |
170 |
Довжина і діаметр циліндра перебувають у певній залежності
(табл. 9.5).
Таблиця 9.5. Розміри циліндрів деяких трієрів
Довжина циліндра, |
|
Діаметр циліндра, мм |
|
|
мм |
400 |
500 |
600 |
800 |
750 |
* |
* |
* |
|
1500 |
* |
* |
* |
|
2250 |
|
* |
* |
|
3000 |
|
|
* |
* |
9.6. Фрикційне очищення
Фрикційний спосіб очищення ґрунтується на різниці коефіцієн- тів тертя зерна окремих фракцій суміші, які за розмірами та аеро- динамічними властивостями майже не відрізняються.
Для фрикційного очищення найчастіше використовують рухому плоску похилу поверхню (гірку).
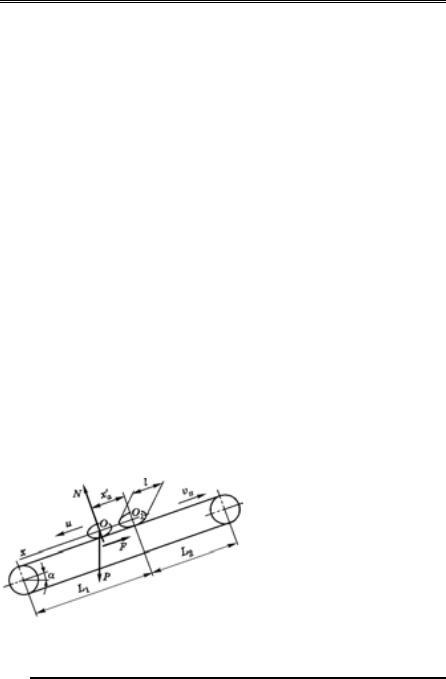
Рис. 9.13. Схема руху часточки на полотні похилої гірки
При рівномірній подачі зернової суміші на рухому похилу площину залежно від коефіцієнта тертя зерно по-різному рухатиметься по робочій поверхні площини, в результаті чого відбудеть- ся поділ суміші на фракції.
Розглянемо переміщення часточок по полотну, яке на- хилене під кутом α до гори- зонту (рис. 9.13) і рухається в напрямку швидкості vп.
362

Основи теорії та розрахунку машин для післязбиральної обробки зерна
На часточку, яка надходить на полотно в точці O, діють сили тя- жіння Р = mg, нормальна реакція N і сила тертя F.
Рух часточки вздовж полотна можна виразити таким диференці- альним рівнянням:
m du |
= mg sin α − F , |
(9.27) |
dt |
|
|
де и — швидкість руху часточки відносно полотна; m — маса зерна. Ураховуючи, що F = Ntgϕ = mgcosαtgϕ, де ϕ — кут тертя часточки
по полотну, після перетворення отримаємо:
du = g sin(α − ϕ) dt. cos ϕ
Після інтегрування рівняння дістанемо вираз для відносної швидкості
и = g sin(α − ϕ) t +C. cos ϕ
Якщо часточка потрапляє на полотно з нульовою швидкістю, то в початковий момент вона набуває швидкості vп полотна, тоді стала
інтегрування С при t = 0 становитиме С=vп.
Підставивши C = vп у вираз для швидкості відносного руху, ма-
тимемо |
|
|
u = v |
= g sin(α − ϕ) t. |
(9.28) |
п |
cos ϕ |
|
Із рівняння (9.28) випливає, що при α ≤ ϕ часточка переміщуєть- ся вгору разом з полотном, а при α ≥ ϕ відносна швидкість ив безпе-
рервно зростатиме.
Відносне переміщення х0 часточки по полотну становить
= = gt2 sin(α − ϕ) x0 vпt 2 cos ϕ .
Часточка разом із полотном за час t переміщується на xп = vпt.
Отже, абсолютний рух часточки характеризуватиметься різни- цею:
xa = x0 − xп, або xа = |
gt2 sin(α − ϕ) |
. |
(9.29) |
|
2 |
cos ϕ |
|||
363