

- •Передмова
- •1.1.1. Завдання та наукові основи механічного обробітку ґрунту
- •1.1.2. Операції, способи, машини і знаряддя для обробітку ґрунту
- •1.1.3. Ґрунт як об’єкт обробітку
- •1.2.1. Теоретичні основи технологічного процесу оранки
- •1.2.2. Ножі та теорія різання ґрунту лезом
- •1.2.3. Плужні корпуси та взаємодія клину з ґрунтом
- •1.2.5. Визначення параметрів польової дошки
- •1.2.7. Особливості швидкісних робочих поверхонь плужних корпусів
- •1.2.8. Сили, що діють на плужний корпус
- •1.2.9. Тяговий опір плуга
- •1.2.10. Обґрунтування схеми розміщення робочих органів на рамі плуга
- •1.2.11. Умови рівноваги плуга
- •1.3. Теорія та розрахунок дискових ґрунтообробних машин і знарядь
- •1.3.1. Основні геометричні параметри дисків
- •1.3.2. Регульовані технологічні параметри та процес роботи дисків
- •1.3.3. Силова характеристика і тяговий опір дискових робочих органів
- •1.4. Теорія та розрахунок зубових борін
- •1.4.1. Робочі органи і процес роботи зубових борін
- •1.4.2. Розміщення зубів на рамі борони
- •1.4.3. Рівновага і тяговий опір зубової борони
- •1.5. Теорія та розрахунок культиваторів
- •1.5.1. Робочі органи культиваторів та їхні параметри
- •1.5.2. Дія полільних і універсальних лап на коріння бур’янів
- •1.5.3. Взаємне розміщення полільних і універсальних лап
- •1.5.4. Дія розпушувальних лап на ґрунт і їх взаємне розміщення
- •1.5.5. Система кріплення лап до рами та стійкість ходу по глибині
- •1.5.6. Визначення основних параметрів культиваторів
- •1.6.1. Робочі органи фрез, проріджувачів і штангових культиваторів
- •1.6.2. Процес роботи і траєкторія руху робочих органів фрези та проріджувача
- •1.6.3. Основні параметри роботи фрези
- •1.6.4. Витрати потужності для роботи фрези
- •1.6.5. Визначення основних параметрів фрези
- •1.7. Теорія та розрахунок котків
- •1.7.1. Процес дії котка на ґрунт
- •1.7.2. Визначення параметрів котка
- •1.7.3. Опір перекочуванню котка
- •Основи теорії та розрахунку машин для сівби і садіння
- •2.1. Основні властивості насіння
- •2.1.1. Технологічні властивості насіння
- •2.1.2. Закономірності руху насіння
- •2.2. Типи робочих органів сівалок
- •2.2.1. Основи розрахунку котушкових висівних апаратів
- •2.2.2. Основи теорії та розрахунку дискових висівних апаратів
- •2.2.3. Основи теорії та розрахунку пневматичних висівних апаратів
- •2.2.4. Основи теорії сошників
- •2.3. Типи робочих органів машин для садіння
- •2.3.1. Основи теорії картоплесадильних машин
- •2.3.2. Основи теорії машин для садіння розсади
- •Основи теорії та розрахунку машин для внесення добрив
- •3.1. Способи внесення добрив, види добрив та їхні технологічні властивості
- •3.2. Типи робочих органів машин для внесення мінеральних добрив
- •3.2.1. Основи теорії дискових дозувальних апаратів
- •3.2.2. Основи теорії відцентрових розсіювальних дисків
- •3.3. Типи робочих органів машин для внесення органічних добрив
- •3.3.1. Вибір і обґрунтування параметрів конвеєрного дозувального апарата
- •3.3.2. Вибір і обґрунтування параметрів розкидального апарата органічних добрив
- •Основи теорії та розрахунку машин для захисту рослин
- •4.1. Основи теорії розпилення рідин і порошків
- •4.1.1. Механічне розпилення рідин
- •4.1.2. Утворення електрично заряджених аерозолів
- •4.1.3. Розпилення порошків
- •4.1.4. Конденсаційне утворення аерозолів
- •4.1.5. Вплив розмірів краплин на ефективність обприскування і обґрунтування оптимальної дисперсності
- •4.2. Технологічний розрахунок робочих органів обприскувачів
- •4.2.1. Розрахунок параметрів баків і мішалок
- •4.2.2. Розрахунок параметрів насосів
- •4.2.3. Розрахунок параметрів розпилювальних пристроїв
- •4.3. Технологічний розрахунок робочих органів протруювачів
- •4.4. Технологічний розрахунок робочих органів обпилювачів
- •5.1. Подільники і стеблепідіймачі
- •5.1.1. Основи теорії, призначення, типи і застосування подільників
- •5.1.2. Основи теорії, призначення, типи і застосування стеблепідіймачів та гичкопідіймачів
- •5.2. Мотовила
- •5.2.1. Призначення, типи і застосування мотовил
- •5.2.2. Основи теорії та розрахунку мотовил
- •5.3. Різальні апарати
- •5.3.1. Призначення, типи і застосування різальних апаратів
- •5.3.2. Параметри, що впливають на різальну здатність ножа
- •5.3.4. Ротаційні різальні апарати з вертикальною віссю обертання. Типи. Основи теорії та розрахунку
- •5.3.6. Ротаційні різальні апарати з горизонтальною віссю обертання. Основи теорії та розрахунку
- •5.4. Вальцьові апарати
- •5.4.1. Типи і призначення вальцьових апаратів
- •5.4.2. Основи теорії та розрахунку вальцьових апаратів
- •5.5. Подрібнювальні апарати
- •5.5.1. Призначення, типи і застосування подрібнювальних апаратів
- •5.5.2. Основи теорії та розрахунку подрібнювачів кормозбиральних комбайнів
- •5.6. Транспортувальні пристрої жаток
- •5.6.1. Призначення, типи і застосування транспортувальних пристроїв жаток
- •5.6.2. Основи теорії та розрахунку транспортувальних пристроїв жаток
- •5.7. Обчісувальні пристрої
- •5.7.1. Призначення, типи і застосування обчісувальних пристроїв
- •5.7.2. Основи теорії та розрахунку обчісувальних пристроїв
- •5.8. Підбирачі
- •5.8.1. Призначення, типи і застосування підбирачів
- •5.8.2. Основи теорії та розрахунку підбирачів
- •Основи теорії та розрахунку робочих органів молотарок зернозбиральних комбайнів
- •6.1. Молотильно-сепарувальні пристрої
- •6.2. Соломовідокремлювачі
- •6.2.1. Призначення і типи соломовідокремлювачів
- •6.2.2. Основи теорії та розрахунку соломовідокремлювачів
- •6.3. Очисники зерна
- •6.3.1. Призначення, типи, параметри і режим роботи очисників зерна
- •6.4. Домолочувальні пристрої
- •6.4.1. Призначення, типи, параметри і режим роботи домолочувальних пристроїв
- •6.5. Бункери для зерна
- •6.5.1. Елементи конструкції і параметри бункерів для зерна
- •6.5.2. Тривалість заповнення і розвантаження бункера
- •6.6. Продуктивність і пропускна здатність комбайна
- •Основи теорії та розрахунку робочих органів для згрібання і пресування сіна
- •7.1. Типи робочих органів і процес згрібання сіна
- •7.2. Обґрунтування параметрів і режимів роботи поперечних граблів
- •7.4.1. Типи робочих органів пресів
- •7.4.2. Обґрунтування параметрів пресувальної камери
- •Основи теорії робочих процесів машин для збирання кукурудзи на зерно
- •8.2. Основні робочі органи кукурудзозбиральних машин
- •8.4. Пропускна здатність і швидкість обертання відокремлювальних вальців
- •8.5.1. Вибір розмірів і частоти обертання очисних вальців
- •Основи теорії та розрахунку машин для післязбиральної обробки зерна
- •9.1. Принципи очищення і сортування зерна
- •9.2. Способи очищення і сортування зерна
- •9.3. Фізико-механічні властивості зернових сумішей
- •9.3.1. Геометричні розміри насіння
- •9.3.2. Аеродинамічні властивості зернових сумішей
- •9.3.3. Інші властивості зернових сумішей
- •9.4. Робота плоских решіт
- •9.4.1. Умови переміщення матеріалу на решеті, що коливається
- •9.4.2. Умови проходження зерна крізь отвори решета
- •9.4.3. Повнота розділення зерна і режим роботи решіт
- •9.4.4. Кінематичний режим роботи решіт
- •9.4.5. Навантаження на решета та їх продуктивність
- •9.5. Робота циліндричного трієра
- •9.5.1. Теоретичні основи роботи трієра
- •9.5.2. Випадання зерна з комірки трієра і установлення приймального лотока
- •9.5.3. Режим роботи циліндричного трієра
- •9.5.4. Продуктивність трієра
- •9.6. Фрикційне очищення
- •9.7. Повітряні системи
- •9.7.1. Робочий процес у вертикальному каналі з нагнітанням повітря
- •9.7.2. Робочий процес похилого повітряного потоку
- •9.8. Теорія та розрахунок вентиляторів
- •9.8.1. Типи вентиляторів
- •9.8.2. Основне рівняння вентилятора
- •9.8.3. Вибір вентилятора
- •9.9. Основи теорії сушіння зерна
- •9.9.1. Властивості зерна як об’єкта сушіння
- •9.9.2. Загальна схема процесу сушіння
- •9.9.3. Режим роботи і продуктивність сушарок
- •Основи теорії та розрахунку бурякозбиральних машин
- •10.2. Основи розрахунку параметрів апаратів для зрізування гички та очищення головок коренеплодів
- •10.2.1. Апарати для зрізування гички
- •10.2.2. Очисники головок коренеплодів цукрових буряків на корені
- •10.3. Типи та основні параметри викопувальних робочих органів
- •10.3.1. Лемішні викопувальні робочі органи
- •10.3.2. Дискові викопувальні робочі органи
- •10.3.3. Роторні викопувальні робочі органи
- •10.4. Вибір, обґрунтування і розрахунок основних параметрів очищувальних робочих органів
- •Основи теорії та розрахунку машин для збирання картоплі
- •11.1. Машини і способи збирання картоплі
- •11.3. Типи та основні параметри підкопувальних робочих органів
- •11.4. Вибір та обґрунтування основних параметрів пруткового елеватора і грохота
- •11.5. Типи сортувальних робочих органів
- •11.6. Визначення основних параметрів сортувальної роликової поверхні
- •Основи теорії та розрахунку машин для збирання льону
- •12.1. Характеристика льону як об’єкта збирання
- •12.2. Машини і способи збирання льону
- •12.3.1. Типи бральних апаратів
- •12.3.2. Основи теорії бральних апаратів
- •12.4. Льонозбиральні комбайни
- •12.4.1. Типи і робочий процес льонозбиральних комбайнів
- •12.4.2. Вибір та обґрунтування основних параметрів обчісувальних апаратів
- •Список використаної літератури

Розділ 9
Таким чином, переміщення часточки при абсолютному русі в часі змінюється за законом параболи. Швидкість полотна не впливає на переміщення часточки, що ковзає. Вгору часточки рухаються зі швидкістю полотна.
Для того щоб часточки вкладалися в один шар, потрібно забез- печити для часточок, які ковзають, умову
x |
|
= |
gt2 |
sin(α − ϕ) |
≥ l, |
а |
1 |
cos ϕ |
|||
|
|
2 |
|
де t1 — час, упродовж якого часточка переміщується на довжину l. Розв’язавши це рівняння, отримаємо
t = |
2l cos ϕ |
. |
(9.30) |
|
g sin(α − ϕ) |
||||
1 |
|
|
Із виразу (9.30) видно, що чим більший кут α нахилу полотна, тим менший час t1 , при цьому збільшується продуктивність машини.
Щоб тверді часточки не скочувалися вниз, відстань має бути L1 ≥ x1a . Частина робочої довжини L2 від місця подачі до верхнього
кінця також має бути більшою за величину x1a , щоб уникнути по-
трапляння до верхньої фракції часточок з гладенькою поверхнею. У полотенних гірках ( L1 + L2 ) має бути достатньою, щоб відокре-
мити насіння, навіть з великою різницею коефіцієнтів тертя. Для очищення насіння буряків швидкість полотна беруть 0,65…0,85 м/с, кут α регулюють у межах 18…27°, оптимальну подачу на 1 м шири- ни полотна вибирають 0,028…0,03 кг/с.
9.7. Повітряні системи
Повітряні системи можуть бути як самостійними машинами, так і складовою зерноочисних машин. Вони відокремлюють легкі до- мішки із зернової суміші та сортують зерно. Робочими органами по- вітряних систем є вентилятори, сепарувальні канали, відстійні ка- мери і пиловідокремлювачі.
Повітряні системи відрізняються:
y за напрямком повітряного потоку — з вертикальним і похилим потоком;
y за способом надходження повітря в канали — із всмоктуваль- ним, нагнітальним і нагнітально-всмоктувальним потоками;
y за кількістю сепарувальних каналів — з одним або двома ка- налами;
364

Основи теорії та розрахунку машин для післязбиральної обробки зерна
y за способом циркуляції повітря — з розімкненим або замкне- ним циклом.
Системи із нагнітально-всмоктувальним потоком мають два вен- тилятори, з яких один нагнітає повітря, а другий всмоктує.
9.7.1.Робочий процес у вертикальному каналі з нагнітанням повітря
Такий потік поділяє зернову суміш на дві фракції: легку, яка під- німається по каналу вгору, і важку, яка надходить униз до виходу.
У вертикальному нагнітальному потоці на часточку масою m ді- ють сила тяжіння G і сила опору повітря R (див. рис. 9.5).
Диференціальне рівняння руху часточки масою m матиме ви- гляд
m = du − R +G = 0, |
(9.31) |
||||
де u — швидкість руху тіла. |
dt |
|
|
||
|
|
|
|
||
Ураховуючи (9.31), напишемо вираз для R: |
|
||||
R |
= |
G |
(v −u)2 , |
(9.32) |
|
v2 |
|||||
|
|
п |
|
||
|
|
кр |
|
|
|
де vп — швидкість повітряного потоку; vкр — критична швидкість. |
||||||||||
Після заміни R отримаємо |
|
|
|
|
|
|||||
|
v2 |
|
|
du |
|
|
|
|||
|
кр |
|
|
|
= dt. |
(9.33) |
||||
|
g |
|
(v |
−u)2 −v2 |
|
|||||
|
|
|
|
|
n |
|
кр |
|
||
Якщо взяти vп – u = ω, то матимемо dvп = –dω. |
|
|||||||||
Після заміни рівняння (9.33) можна записати у вигляді |
|
|||||||||
|
|
v2 |
|
|
dω |
|
|
|||
|
|
кр |
|
|
|
(9.34) |
||||
|
|
g |
|
− ω2 −v2 |
dt. |
|||||
|
|
|
|
|
|
|
кр |
|
|
|
Зінтегрувавши рівняння, отримаємо
−vкр ln ω−vкр = t + A1 , 2g ω+vкр
або
−vкр ln vп −u −vкр = t + A1 , 2g vп −u +vкр
де A1 — стала інтегрування.
365

Розділ 9
При t = 0, u = 0. Тоді
A1 = −vкр ln vп −vкр . 2g vп +vкр
Позначивши vп + vкр = р; vп – vкр |
= с; |
|
2g |
= α, отримаємо |
||||||
|
|
|
||||||||
|
|
|
|
|
|
|
vкр |
|
||
ln |
(c −u)p |
= −αt , або (c −u)p |
= e−αt . |
|||||||
|
( p −u)c |
|
|
|
( p −u)c |
|
||||
Розв’язавши рівняння (9.35), дістанемо |
|
|||||||||
|
u = p + |
p − c |
|
|
. |
|
|
|||
|
|
c |
|
|
|
|||||
|
|
|
−αt |
|
||||||
|
|
|
1 + |
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
p |
|
|
|
|
|
|
(9.35)
(9.36)
Аналіз наведеної залежності показує, що швидкість u = f(t) зрос- тає по кривій ОМ (рис. 9.14) і асимптотично «наближається» до зна- чення, яке визначається ординатою
C = vп – vкр.
Максимальна швидкість umax руху
часточки визначатиметься різницею між швидкістю vп повітря і критичною швид-
кістю часточки vкр:
umax = vп – vкр. |
(9.37) |
Рис. 9.14. Зміна швидкості
руху часточки у вертикаль- Робочу швидкість vр вертикального ному каналі залежно від часу повітряного потоку вибирають залежно
польоту
від критичної швидкості компонентів, які входять у зернову суміш. Вона має бути більшою за критичну швидкість домішок і меншою від критичної швидкості основного зерна, тобто
vкр.дом < vр < vкр.зер. |
(9.38) |
У сучасних зерноочисних машинах застосовують, як правило, два канали повітряного очищення. В першому відокремлюють легкі до- мішки і пил, а в другому — решту домішок і щупле зерно.
Швидкість повітряного потоку в першому каналі для очищення пшениці, жита, ячменю і вівса беруть 6,0…6,5 м/с, а в другому —
7…8 м/с.
366
Основи теорії та розрахунку машин для післязбиральної обробки зерна
9.7.2. Робочий процес похилого повітряного потоку
Похилий повітряний потік поділяє зернову суміш за принципом розсіювання траєкторій окремих часточок у напрямку швидкості повітряного потоку.
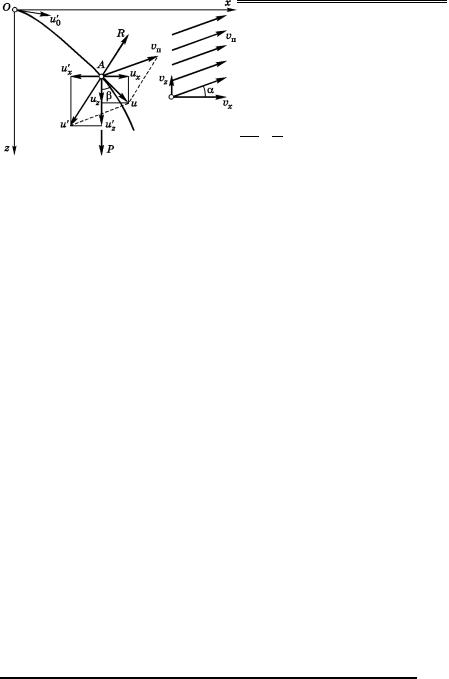
Схему роботи похилого повітряного каналу, в якому початкова швидкість зерна дорівнює нулю, показано на рис. 9.15. На зерно ді- ють сила ваги зерна mg і сила дії повітряного потоку R, яка діє в напрямку швидкості потоку. Напрямок абсолютної швидкості зерна
збігається з напрямком рівнодійної mg + R. Відхилення абсолютної швидкості на початку руху від вертикалі β.
Рис. 9.15. Схема роботи похило- го повітряного каналу
Розглянемо випадок (рис. 9.16), коли зернова суміш по-
трапляє в повітряний потік з деякою початковою швидкістю u0′ .
Зернова суміш розділяється повітряним потоком за умови, що вертикальна складова vz швидкості повітряного потоку менша за
критичну швидкість часточки vкр, тобто vz < vкр.
Рух часточки в повітряному потоці залежить від багатьох чинни- ків: від властивості компонентів, значення і рівномірності напору повітряного потоку, а також від швидкості, з якою часточка входить у повітряний потік.
Якщо вважати, що повітряний потік ламінарний, сталий за зна- ченням і напрямком швидкості, то на часточку діють сила тяжіння Р = mg і сила діючого повітряного потоку R, спрямована в бік, про- тилежний відносній швидкості руху часточки.
Під дією цих сил часточка рухається в потоці по певній траєкто- рії, причому повний рух складається з переносного руху з потоком і відносно нього.
Нехай ux′ і uz′ — складові швидкості відносного руху в певній точ- ці А траєкторії ОА. Тоді проекції швидкості абсолютного руху на осі
367

Розділ 9
нерухомих координат x i z будуть:
ux = vx −ux′ ; uz = uz′ −vz ,
де vx і vz — проекції швидкості повітряного потоку на осі x i z. Значення проекцій vx і vz відносно однакові:
vx = vп cos α; vz = vп sin α.
Відхилення швидкості абсолютного руху и від вертикалі визна- чається кутом β, значення якого знаходять за виразом
|
u |
vp cos α −ux′ |
|
|
||
tg β = |
x = |
|
|
. |
(9.39) |
|
uz′ |
−vp sin α |
|||||
|
uz |
|
|
|||
У міру переміщення часточки відносна швидкість u′ змінюється за значенням і напрямком, намагаючись досягти граничного зна-
чення, за якого вертикальна складова |
|
uz′ гр досягає |
критичної |
||
швидкості vкр вертикального напрямку, тобто uz′ гр → vкр; |
ux′ → 0. |
||||
Ураховуючи попередній вираз і підставивши в (9.39), отримаємо |
|||||
tg βгр = |
vп cos α |
|
. |
(9.40) |
|
v |
−v sin |
α |
|||
|
кр |
п |
|
|
|
Для часточок, які надходять у повітряний потік, критична швид- кість змінюється від vкр min до vкр max. У цьому разі траєкторія часто-
чок одної й тієї самої суміші будуть деяким пучком, який визнача- ється кутами tg βгр min і tg βгр max. Значення кутів знаходять за спів-
відношенням
tg βгрmin = |
|
vп cos α |
; |
||
vкрmax −vп sin α |
|||||
|
|
|
|||
tg βгрmax = |
|
vп cos α |
|
. |
|
|
vкрmin −vп sin α |
|
|||
|
|
|
|
||
Розсіювання пучка траєкторії можна охарактеризувати різницею βгр min і βгр max, яку визначають за виразом
tg(β |
−β |
грmin |
) = |
tg βгрmax − tg βгрmin |
. |
|
|
||||||
грmax |
|
1 |
+ tg βгрmintg βгрmax |
|||
|
|
|
||||
Замінивши tg βгр min і tg βгр max відповідними співвідношеннями, матимемо
368

Основи теорії та розрахунку машин для післязбиральної обробки зерна
|
|
tg(βгрmax −βгрmin ) = |
|
|
|
|||
= |
|
vп cos α(vкрmax −vкрmin ) |
|
. |
(9.41) |
|||
v |
v |
−v |
sin α(v |
+v |
) +v2 |
|||
|
крmax крmin |
п |
крmax |
крmin |
п |
|
||
Із виразу (9.41) випливає, що розсіювання траєкторії руху части- нок залежить від різниці критичних швидкостей і від кута α на- прямку швидкості vп повітряного потоку. Зі збільшенням різниці
vкр max – vкр min гранична критична швидкість розсіювання зростає. Змен-
шення кута α скорочує розсіювання. Горизонтальний потік (cos α = 1) зу- мовлює менше розсіювання, ніж по-
хилий (cos α < 1).
Зміну tg (βгр max – βгр min) залежно від швидкості vп повітряного потоку
при vкр min = 8,5 м/с, vкр max = 11,5 м/с
і різних значеннях кута α = 15, 20 і 25° показано на рис. 9.17.
Із графіка випливає, що зі збіль- шенням швидкості vп розсіювання
зростає до певного максимального значення, а потім спадає. Найбільше розсіювання буде тоді, коли похідна
від vп функції (βгр max – βгр min) дорів- нюватиме нулю, тобто
Рис. 9.17. Зміна функції tg(βгр max — βгр min) залежно від швидкості повітряного потоку при куті нахилу:
1 — α = 25°; 2 — α = 20°; 3 — α = 15°
d tg(βгрmax −βгрmin ) = 0. dvп
Здиференціювавши вираз (9.41), отримаємо, що максимальне розсіювання траєкторії руху часточок відповідатиме такій швидко- сті:
vпmax = vкрmaxvкрmin . |
(9.42) |
Отже, робоча швидкість похилого потоку vп.роб = vп max, при якому
зернова суміш отримує найбільшу розсіюваність, дорівнює середній геометричній з крайніх значень критичних швидкостей. Найкращі результати роботи повітряного потоку при розділенні зернових су- мішей, злакових культур отримують при куті нахилу до горизонту 18…30° і швидкості потоку повітря в робочій камері 4,5…8,5 м/с.
369