

Sq1int/ Sq2int - Square Interpolation
For known values Y1 and Y2 of a function f(x) corresponding to values of X1 and X2 of the independent variable, interpolation is the process of estimating a value Y of the function for a value X lying between two values of X, e.g. X1 and X2.

Square interpolation assumes that (X1 Y1), (X Y), and (X2 Y2) all lie on a square line segment (see diagrams).
Arguments
Xin% - 32-bit signed integer
The value of x' for the intermediate coordinate to be calculated.
X1% - 32-bit signed integer
The x-coordinate of the first known point.
X2% - 32-bit signed integer
The x-coordinate of the second known point.
Y1% - 32-bit signed integer
The y-coordinate of the first known point.
Y2% - 32-bit signed integer
The y-coordinate of the second known point.
Return Values
Yout%
The y-coordinate (y') of the intermediate point.
Example - Sq1INT

Example - Sq2INT

Target/ Language Restrictions
None.
See Also
LinINT
________________________________________________________________________________
Sqr - Square Root Function
This function returns the square root of a value.
![]()
Arguments
IN
A floating-point value.
Return Values
Q
The square root of IN.
Target/ Language Restrictions
None.
________________________________________________________________________________
Sramp - s-Ramp Profile Generator Function
This block provides an S-Ramp (S-Curve) function on a base variable X. The block is the same as the UD70/MD29's internal position controller's linear profile generator block.
If X is position, it will produce an S-ramp in position (linear ramp in the speed).
If X is velocity, it will produce an S-ramp in velocity (linear ramp in the acceleration). For velocity applications, a block named VEL2POS can be used to couple the SRAMP block to the POSLOOP PID controller.
![]()
Note: Some variables are looped back to facilitate dynamic switching between SRAMP blocks.

Speed Applications
The velocity output could be scaled by the user and written to #1.21 or the fast update parameter (#91.02) directly, or used in conjunction with VEL2POS. Using the VEL2POS block allows the user to couple the SRAMP block to the POSLOOP block.



The following graphs show the outputs of the SRAMP block in relation to a step change on the input.

See Also
RAMP
SSRAMP
MPOT
________________________________________________________________________________
Ssramp - s-Ramp Profile Generator Function
The algortihm for this block uses double precision floating point maths to ensure the precision is maintained for deriving S-Ramp profiles with smooth granularity. The block has been designed specifically to assist with lift applications where the drive can be controlled in velocity or floor-to-floor position control.
|
Warning: |
Because floating point maths is used with this block it is not intended to work in fast tasks such as the UD70 Speed task. In general lift applications the UD70 Encoder task or a slow SM-Applications POS task is sufficient. |
![]()
Arguments
Pref%
Position reference. The target position in encoder counts.
Pcurr%
Current position in encoder counts.
Vref%
Velocity reference in encoder counts/second.
Vacc%
Acceleration in encoder counts/second/second.
Vjerk
Jerk rate of acceleration in encoder counts/second/second.
Ctrl%
Control word.

Return Values
Q%
Profile in progress.

Pos%
Profile position in encoder counts.
Vel%
Profile velocity in encoder counts./second.
Acc%
Profile acceleration in encoder counts/second^2.
Pstop%
Profile stopping distance in encoder counts.
Diagram showing the functionality of the SSRAMP block

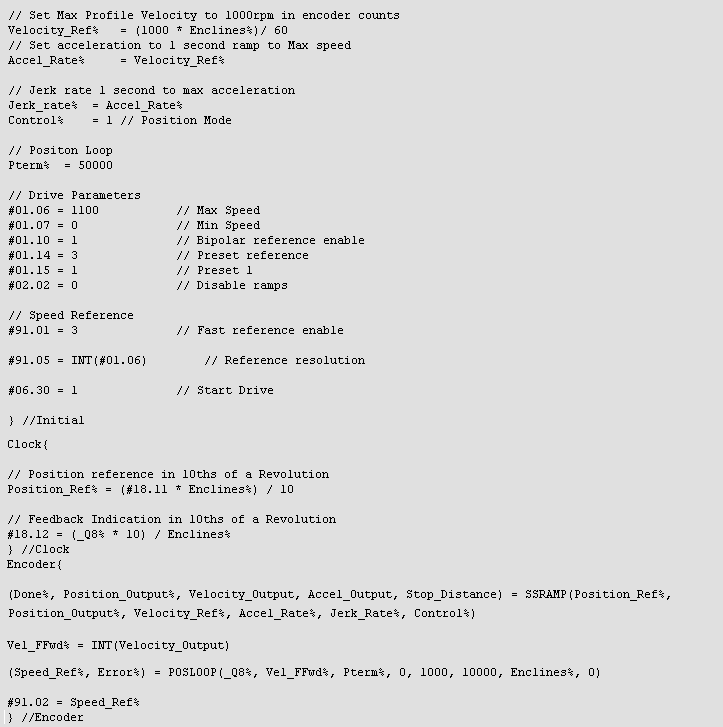
Example

See Also
RAMP
SRAMP
MPOT
________________________________________________________________________________