

Оценка качества переходного процесса по высокочастотной характеристике замкнутой системы

Рисунок 7.3 Вещественные и частотные характеристики САУ.
Конец ВЧХ соответствует началу переходного процесса, начало ВЧХ - соответствует концу переходного процесса.
1 - h(t)имеетG=0;
2 -
![]() имеетG£18%;
имеетG£18%;
3,4 - h(t)– колебательная (рисунок
7.3). Причем, чем больше![]() ,
тем больше G, при
,
тем больше G, при![]() ®¥имеют место незатухающие колебания,
т.е. система находится на границе
устойчивости
®¥имеют место незатухающие колебания,
т.е. система находится на границе
устойчивости
![]() ;
;
![]() .
.
Если P3()есть минимум (рисунок 7.3, кривая 4), то
колебательностьh(t)увеличивается;tп, п- интервал положительный.P3()и![]() - 4;
- 4;
Если имеет место кривая 1, то
![]() ;
;
Если имеет место кривая 2, то
![]() .
.
Корневые критерии качества переходного процесса
Время затухания отдельной составляющей
переходного процесса определяет еlit,
т.е.![]() ,ai-
действительная часть корня
характеристического уравнения замкнутой
системы.
,ai-
действительная часть корня
характеристического уравнения замкнутой
системы.
![]() - постоянная затухания переходного
процесса, т.е. длительность отдельных
составляющих переходного процесса
тождественнаTiи обратно
пропорциональна½ai½.
- постоянная затухания переходного
процесса, т.е. длительность отдельных
составляющих переходного процесса
тождественнаTiи обратно
пропорциональна½ai½.
Наиболее длительная составляющая
переходного процесса, определяющая
весь переходный процесс соответствует
корню с минимальной действительной
частью ½a½min.
Абсолютная величина½a½minназывается степенью устойчивостиh=½a½minи![]() .
.
![]() ;
;
![]() .
.

Рисунок 7.4 Критерий колебательности - степень колебательности
Колебательная составляющая переходного процесса
![]() .
.
Колебательность определяется отношением соседних максимумов:
 .
.
Здесь период колебаний
![]() и
и
 ,
так какai<0.
,
так какai<0.
Мера колебательности есть
![]() ;
;![]() - степень колебательности.
- степень колебательности.
 ,
,![]() .
.
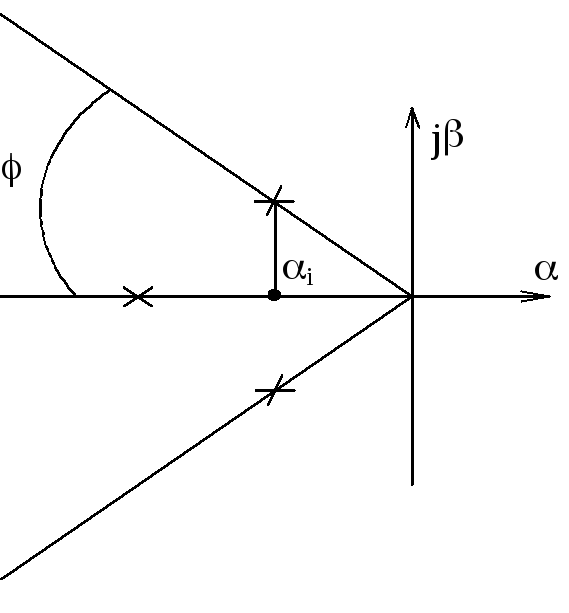
Рисунок 7.5 Границы области расположения полюсов
Чем больше j, тем
больше![]() ,
больше
,
больше![]() ,
т.е. больше
,
т.е. больше ,
более колебательна система.
,
более колебательна система.
Такое определение параметров качества справедливо для систем, передаточные функции которых не содержат нулей и при нулевых начальных условиях.

Интегральные оценки качества
В качестве оценок качества переходного процесса принимаются определенные интегралы отклонения выходной величины Y от нового установившегося состояния.
Оценки выбираются так, чтобы они с одной стороны характеризовали переходный процесс, а с другой выражались бы через параметры системы, такими оценками являются интегралы.
![]() ; (7.3)
; (7.3)
Выражение (7.3) представляет собой линейную интегральную оценку.
![]() ; (7.4)
; (7.4)
![]() ,
(7.5)
,
(7.5)
Критерий (7.5) характеризует квадратичную
интегральную оценку, где
![]() .
.
Интеграл (7.3) выражает площадь между кривыми переходного процесса и установившимся значением Y(¥)(рисунок 7.6).
Чем меньше эта площадь I1, тем быстрее производится регулирование, тем лучше, таким образом, имеется минимум интеграл (7.3) и соответствующие этому минимуму параметры системы.
Выражение (7.3) примем для монотонной Y(t)без перерегулирования и смены знака. ЕслиY(t)- колебательна, то для такойY(t)площади будут вычитаться, и для неустойчивого режима автоколебаний будим иметь0 I1(площади) (рисунок 7.7).
Для оценки колебательного процесса надо использовать квадратичный критерий (7.4).
Этот критерий основан на приближении кривой Y(t)к форме скачка, которую имеет входное воздействие, если пишется минимумI2.
Геометрически это будет выглядеть так: кривая переходного процесса MLNбудет тем ближе к идеальной кривойMON, чем меньше будет интегралI2. Но опыт показывает, что, создавая такое быстродействие (при минимумеI2),Y(t)будет колебательным (тоже и сI1) (рисунок 7.8).

Рисунок 7.6 Линейная интегральная оценка

Рисунок 7.7 Кривая y(t) при неустойчивом режиме автоколебаний.

Рисунок 7.8 К оценке колебательного процесса.
Когда этот критерий неприменим, то
переходят к критерию (7.5). Интеграл (7.5)
состоит из 2-х частей. Первый интеграл
является I2, а второй
интеграл от![]() ,
т.е. от квадрата скорости измененияDy
во времени.
,
т.е. от квадрата скорости измененияDy
во времени.
Преобразуем (7.5):

т.е. I3будет минимальным,
если![]() ,
откуда
,
откуда![]() , но так как
, но так как![]() ,
то
,
то![]() .
.
При наименьшем интеграле (7.5) переходный процесс протекает по экспоненте с определенной постоянной времени. Если в случае наименьшей квадратичной ошибки (7.5) мы стремились приблизить переходный процесс к скачкообразной функции, то в случае (7.5) переходной процесс приближаем к экспоненте, смягчая условие оптимальности и задавая некоторое замедление (рисунок 7.9).

Рисунок 7.9 Кривая переходного процесса при квадратичной интегральной оценке
В заключении укажем основные области применения рассмотренных критериев.
Частотные и интегральные критерии используются при исследовании качества переходных процессов, вызванных основными (главными) воздействиями. Эти критерии позволяют учесть конкретную форму воздействия и начальные условия.
Интегральные критерии применяются в этом же случае для определения оптимального значения какого-либо варьируемого параметра; численной оценки показателя качества они не дают.
Корневые критерии используются главным образом для оценки в среднем качества переходных процессов при всевозможных воздействиях и начальных условиях.
Для систем выше пятого порядка применяются, в основном, частотные критерии.