


|
|
|
|
|
|
|
|
|
|
|
|
|
y = 0y2 |
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
By |
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
nC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
@ |
::: |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
10y2 |
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
0 |
::: |
0 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
B |
p1 |
p2 |
|
p3 |
::: |
pn |
CB |
y1 |
C |
|
|
|||||
|
|
(P |
|
E) |
|
|
= |
B |
0 |
|
1 |
|
|
::: |
0 |
|
y3 |
C |
= 0 |
|||||||
|
|
|
y |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
|
0 |
::: |
|
CBy |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
B |
::: |
|
::: |
|
::: |
::: |
::: |
CB |
nC |
|
|
||||||
|
|
|
|
|
|
|
|
|
B |
|
|
CB |
:::C |
|
|
|||||||||||
Перемножая матрицы получим: |
|
|
|
|
@ |
|
|
|
|
|
|
|
|
|
A@ |
|
|
A |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
8y11 y2 |
= 0 |
|
+ p3y3 + ::: + pnyn = 0 |
|
|
|
|
|
|||||||||||||||
|
|
|
> |
(p |
|
|
)y1 |
+ p2y2 |
|
|
|
|
|
|||||||||||||
|
|
|
>y |
2 |
|
|
y |
3 |
= 0 |
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
||||
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
>yn 1 |
|
|
yn = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
<::: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Система |
(1) |
однородная т.е. |
бесконечное множество решений. |
|
|
|
|
|
|
|
|
|||||||||||||||
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С точностью до коэффициента пропорциональности ее решения могут быть найдены так: Положим yn = 1, получим
|
8yn 2 |
= 2 |
||||
|
|
|
yn |
1 |
= |
|
|
> |
|
|
|
||
|
> |
|
|
|
||
|
< |
|
|
|
||
|
>::: |
|
|
|
||
|
>y1 = n 1 |
|||||
|
> |
|
|
|
||
|
> |
|
|
|
||
Следовательно, собственный вектор |
матрицы P равен |
|
||||
: |
|
|
1 |
|||
|
|
|
|
|
n 1 |
|
|
|
|
|
0 n 2 |
||
|
y = B |
|
C |
|||
|
|
|
|
B |
|
C |
|
|
|
|
B |
::: |
C |
|
|
|
|
1 |
||
|
|
|
|
B |
|
C |
|
|
|
|
@ |
|
A |
Обозначим x - собственный вектор матрицы A, соотвествующий данному , тогда x = Mn 1Mn 2:::M2M1y
10.2Метод вращений
10.2.1Трехдиагональная матрица
Матрица вида
0c1 |
a2 |
b2 |
::: |
0 |
|
0 |
1 |
|
|
B |
a1 |
b1 |
0 |
::: |
0 |
|
0 |
C |
|
B |
0 |
c1 |
a3 |
::: |
0 |
|
0 |
C |
|
0 |
0 |
0 |
::: |
a |
b |
|
|
||
B |
|
::: |
::: |
::: |
n 1 |
|
n 1C |
(1) |
|
B::: |
::: |
|
::: |
C |
|||||
B |
|
|
|
|
|
|
|
C |
|
B |
|
|
|
|
|
|
|
C |
|
@ |
|
|
|
|
|
|
|
A |
|
00 0 ::: cn 1 an
Найдем характеристический полином матрицы (1). Пусть Dk( ) укороченный полином матрицы
0c1 |
a2 |
b2 |
::: |
0 |
|
0 |
1 |
||
B |
a1 |
b1 |
0 |
::: |
0 |
|
0 |
C |
|
B |
0 |
c1 |
a3 |
::: |
0 |
|
0 |
C |
|
0 |
0 |
0 |
::: |
a |
b |
|
|
||
B |
|
::: |
::: |
::: |
k 1 |
|
k 1C |
||
Ak = B::: |
::: |
|
::: |
C |
|||||
B |
0 |
0 |
0 |
::: |
c |
|
a |
k |
C |
B |
|
|
|
|
k 1 |
|
|
C |
|
@ |
|
|
|
|
|
|
|
|
A |
35
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1 |
a2 |
b1 |
|
|
b2 |
|
::: |
|
|
0 |
|
|
|
|
|
0 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
0 |
|
::: |
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
||||
|
|
|
Dk( ) = |
|
Ak |
|
|
E |
|
= |
|
0 |
|
|
c |
|
a |
|
|
::: |
|
|
0 |
|
|
|
|
|
0 |
|
|
|
||||
|
|
|
j |
|
j |
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
|
::: |
a |
k 1 |
|
|
b |
k 1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
::: |
|
::: |
|
|
::: |
|
::: |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
::: |
|
|
|
|
::: |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
|
::: |
|
c |
|
|
|
a |
k |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разлагая этот определитель по элементам |
последнего столбца получим при k > 3 |
|
|
|
|
|||||||||||||||||||||||||||||||
D ( ) = (a |
|
|
)D ( ) |
|
b |
|
|
|
::: |
|
|
|
::: |
|
::: |
|
::: |
|
|
::: = (a |
|
|
)D |
( ) |
|
|
b c |
D ( ) (2) |
||||||||
|
|
|
|
|
|
|
|
a1 |
b1 |
|
::: |
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
k |
k |
|
k 1 |
|
|
k 1 |
|
0 |
|
|
|
0 |
|
::: |
a |
|
|
|
b |
k 2 |
k |
|
|
|
k 1 |
|
|
|
|
|
k 1 k 1 |
k 2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
::: |
|
::: |
|
ck 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Данная формула верна и при k = 2, если положить, что
D0 = 1 и D1( ) = a1
Из формулы (2) следует, что
D2( ) = (a2 )D1( ) b1c1D0
Полагая в формуле (2) последовательно k = 2; 3; :::; n получим D2( ); D3( ); :::; Dn( ) Здесь Dn( ) - характеристический полином данной трехдиагональной матрицы A
10.2.2Ортогональные матрицы
Определение. Вещественная матрица называется ортогональной, если сумма квадратов элементов каждого столбца равна 1, а суммы произведений соотвествующих элементов из двух различных столбцов равны 0. Такое же свойство выполняется и для строк. Ортогональность матрицы может быть охарактеризована следующим матричным равенством A0A = E, A0- транспонированная матрица.
Свойства ортогональной матрицы:
1.единичная матрица ортогональна;
2.если матрица A ортогональна, то A0 = A 1;
3.если матрица A ортогональна, то A0 - тоже ортогональна;
4.произведение двух ортогональных матриц есть ортогональная матрица;
5.определитель ортогональной матрицы равен 1.
A0A = E, следовательно
jA0Aj = jEj = 1
С другой стороны
jA0Aj = jA0jjAj = jAj2 = 1
36
10.2.3Преобразование симметричной матрицы к трехдиагональному виду посредством вращений
Вращением называется преобразование координат с элементарной матрицой вращения
|
|
1 |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
|
|
|
|
0::: ::: ::: ::: |
::: |
::: |
::: |
::: |
::: |
:::1 |
|
||||
|
|
B |
::: |
1 |
::: |
::: |
::: |
::: |
|
|
::: |
C |
|
T |
= |
::: |
::: |
::: |
(1) |
||||||||
B |
::: |
::: |
c |
0 |
::: |
::: |
|
s |
::: |
C |
|||
|
|
B::: |
|
:::C |
|
||||||||
|
|
B |
|
|
|
|
|
|
|
|
|
C |
|
|
|
B::: |
::: |
::: |
0 |
1 |
::: |
::: |
::: |
::: |
:::C |
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
C |
|
ij |
|
B::: |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
:::C |
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
C |
|
|
|
B::: ::: ::: ::: |
::: |
::: |
1 |
0 |
::: |
:::C |
|
||||
|
|
B |
|
|
|
|
|
|
|
|
|
C |
|
|
|
B::: |
::: |
::: |
s |
::: |
::: |
0 |
c |
::: |
:::C |
|
|
|
|
B |
|
|
|
::: |
::: |
::: |
::: |
::: |
C |
|
|
|
|
B::: ::: ::: ::: |
:::C |
|
|||||||||
|
|
@ |
|
|
|
|
|
|
|
|
|
A |
|
|
|
B::: |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
::: |
1 C |
|
|
где c2 + s2 = 1
Геометрически вращение может быть интерпретировано как поворот базисных векторов eiи ej на некоторый угол в плоскости, в которой расположены эти векторы eiи ej
Покажем что любую симметричную матрицу можно привести к трехдиагональной форме посредством цепочки вращений с матрицами вида Tij.
Пусть A - симметричная матрица.
B = ATij C = Tij0 ATij = TijB
Tij0 - транспонированная матрица. Все столбцы матрицы B совпадают со столбцами матрицы A за исключением i j столбцов, которые получаются из соотвествующих столбцов матрицы A по формулам
Bi = cAi + sAjBj = sAi + cAj (2)
В свою очередь строки матрицы C совпадают со строками матрицы B, за исключением i j строк, которые получаются из соотвествующих строк матрицы B по таким же формулам
Ci = cBi + sBjCj = sBi + cBj
Пусть 1 < i < j. Коэффициенты s,c можно выбрать так, чтобы элемент
ci 1;j = bi 1;j = sai 1;i + cai 1;j = 0
То есть достаточно взять
s = ai 1;j
cai 1;i
Следовательно
s= |
p |
ai 1:j |
, c= |
p |
ai 1:i |
ai2 1;i+ai2 1;j |
ai2 1;i+ai2 1;j |
Выбор знака в знаменателе безразличен. Весь процесс приведения симметричной матрице к трехдиагональной выглядит так:
1.за счет преобразований T23; T24; :::; T2nаннулируются по очереди элементы первой строки начиная с 3- его;
2.затем за счет преобразований T34; T35; :::; T3n аннулируются по очереди элементы второй строки начиная с 4-его при этом элементы первой строки больше меняться не будут;
3.далее за счет T45; T46; :::; T4n аннулируются по очереди элементы третьей строки начиная с 5-его и т.д.
После построения трехдиагональной матрицы (1) подобной исходной матрице A собственные значения могут быть найдены путем построения характеристического полинома Dn( ) по рекурентым формулам 2 (см. Трехдиагональная матрица).
37
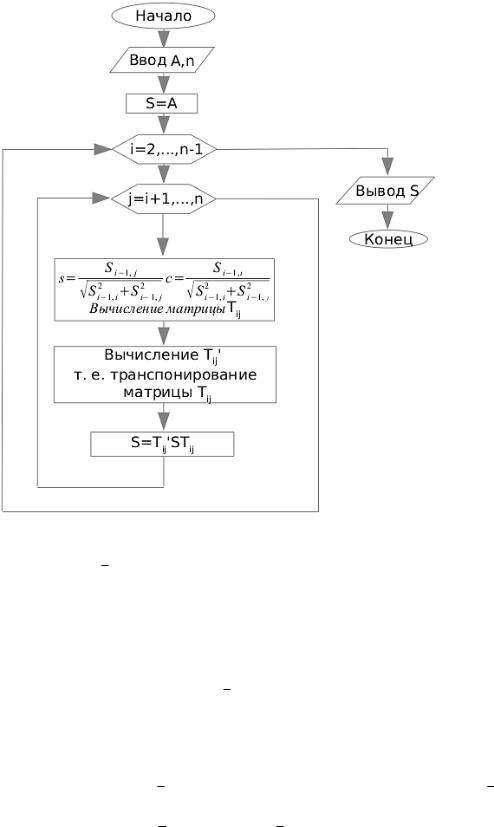
10.2.4Блок-схема алгоритма построения трехдиагональной матрицы
Входные параметры: n - порядок матрицы, A - исходная симметричная матрица Выходные параметры: S - трехдиагональная матрица
10.2.5Вычисление собственных векторов трехдиагональной матрицы и исходной матрицы
Вычисление собственных векторов y трехдиагональной матрицы (1) может быть осуществлено путем решения системы линейных у-ний.
8c1y1 + (a2 |
|
|
i)y2 |
+ b2y3 = 0 |
|
(a1 |
i)y1 |
+ b1y2 |
= 0 |
||
> |
|
|
|
(4) |
|
>
>
<
>:::
>
>
:cn 1yn 1 + (an i)yn = 0
где y1; y2; :::; yn - координаты собственного вектора yi, соотвествующего i Рекомендуется задать первую координату y1
Для перехода от собственных векторов трехдиагональной матрицы (1) к собственным векторам исходной матрицы A нужно использовать соотношение
C = Tn0 1;n:::T230 AT23:::Tn 1;n (5)
Из (5) следует, что собственный вектор x матрицы A соотвествующий собственному вектору y матрицы C равняется
x = T 23T 24:::T n 1;ny
38