

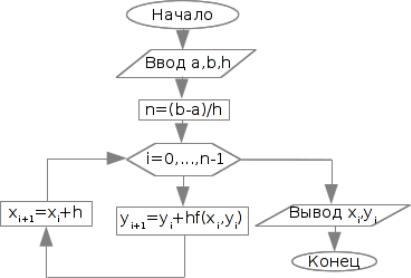
27.2Блок-схема алгоритма метода Эйлера
Входные параметры: a,b,h,x0 = a,y0 = y(x0) Выходные параметры: xi,yi
27.3Применимость метода Эйлера к системам дифференциальных у-ний
Метод Эйлера распространяется на системы дифференциальных у-ний и на дифференциальные у-ния высших порядков. Последние должны быть предварительно приведены к нормальной системе дифференциальных у- ний. Рассмотрим нормальную систему двух дифференциальных у-ний
(
y0 = f1(x; y; z)
(5)
z0 = f2(x; y; z)
с начальными условиями
y(x0) = y0 z(x0) = z0
Приближенные значения вычисляются по формулам
(
yi+1 = yi + hf1(xi; yi; zi) i = 0; 1; 2; ::: (6) zi+1 = zi + hf2(xi; yi; zi)
28 Метод Рунге-Кутта
Пусть дано дифференциальное у-ние
y0 = f(x; y) (1)
с начальным условием
y(x0) = y0
Пусть h - шаг
xi = x0 + ih i = 0; 1; 2; :::
Рассмотрим числа
62

|
K1(i) = hf(xi; yi) |
|
|
|
|||
8K(i) |
= hf(xi + h |
; yi + |
K1(i) |
) |
|||
|
|||||||
> |
(i) |
|
2 |
|
(i) |
|
|
> |
|
h |
|
K2 |
|
||
> |
|
|
|
|
|
|
|
>K3 |
= hf(xi + |
|
; yi + |
|
) |
||
2 |
2 |
||||||
< |
2 |
|
|
|
|||
|
|
|
|
2 |
|
||
>K4(i) = hf(xi + h; yi + K3(i)) |
|||||||
>
>
>
:
Согласно методу Рунге-Кутта последовательные значения yi искомой ф-и определяются по формуле
yi+1 = yi + yi
где
yi = 16 (K1(i) + 2(K2(i) + K3(i)) + K4(i)) i = 0; 1; 2; :::(3)
Так же называется методом Рунге-Кутта четвертого порядка точности. Обладает значительной точностью. Применим для приближенного решения систем обыкновенных дифференциальных уравнений.
Пусть дана система:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
@y |
|
|
|
= f(x; |
|
|
) (4) |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
@x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
и начальные условия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(x0) = |
|
|
0 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
y |
y |
|
|
|
|
|
|
|
|||||||||||||||||
Задавшись шагом h и введя обозначения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
xi = x0 + ih |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(xi) = |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
y |
y |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i+1 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
yi = |
|
|
|
|
0 |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
y |
y |
|
|
|
|
|
|
|||||||||||||||||||||||
получим систему |
8K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2(0) |
= hf(xi + h2 ; y0 + K21 |
) |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
1(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
K |
= hf(xi; |
y |
0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
(i) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|||||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(i) |
|
|
|
|||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
K |
|
= hf(xi + |
|
|
; |
|
0 |
|
+ |
|
|
|
|
) |
|
|
|||||||||||||||||||
|
3 |
|
|
y |
|
|
|
|
||||||||||||||||||||||||||||
|
2 |
|
2 |
|||||||||||||||||||||||||||||||||
|
< |
|
(0) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
>K |
4(0) = hf(xi + h; y0 + K3(i)) |
||||||||||||||||||||||||||||||||||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Согласно методу Рунге-Кутта |
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 ( |
|
(i) |
+ 2( |
|
(i) + |
|
(i)) + |
|
(i)) (6) |
|||||||||||||||||||||||
|
y |
0 |
= |
K |
K |
K |
K |
|||||||||||||||||||||||||||||
|
|
|
|
6 |
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
4 |
|||||||
Отсюда находим
y1 = y0 + y0
Далее, приняв (x1; y1) за исходные данные и повторяя то же самый процесс находим y2, аналогично и так далее.
63
Часть VIII
Аппроксимация ф-и
29 Постановка задачи об апроксимации ф-и
Пусть на некотором множестве задана система ф-ий
f0(x); f1(x); :::; fm(x); :::
которые в дальнейшем будем считать достаточно гладкими ф-ями. Например, непрерывно дифферернцируемыми. Назовем эту систему основной. Ф-и вида
Qm(x) = c0 0(x) + c1 1(x) + ::: + cm m(x) (1)
где c0; c1; :::; cm называются обобщенными полиномами порядка m. В частности, если
0(x) = 1
0(x) = x
...
0(x) = xm
то
Qm(x) = c0 + c1x + c2x2 + ::: + cmxm
есть обычный полином степени m.
Задача о приближении ф-и ставится так: данную ф-ю f(x) требуется заменить обобщенным полиномом Qm(x) заданного порядка m так, чтобы отклонение (в известном смысле) ф-и f(x) от обобщенного полинома Qm(x) на указанном множестве X = fxg было наименьшим. При этом в общем случае Qm(x) называется аппроксимирующим.
Если множество X состоит из отдельных точек, то приближение называется точечным. Если же множество X есть отрезок a 6 x 6 b, то приближение называется интегральным. Термин отклонение двух ф-ий в зависимости от обстоятельств понимается по разному, при этом получают различные типы задач теории приближений:
1.интерполирование;
2.среднее квадратичное приближение;
3.равномерное приближение
4.и д.р.
30 Системы ф-ий, ортогональные на интервале
Определение. Система интегрируемых ф-ий
0(x); 1(x); 2(x); :::; n(x) (1)
называется ортогональной на [a; b] если
a
( m; n) = m(x) n(x)dx = 0 m 6= n
b
jj m(x)jj = |
( m; n) s |
|
|
|
|
|
b |
m2 |
(x)dx m 2 [a; b] |
||||
p |
|
|
a |
|
|
|
|
|
|
|
|
||
64
Если все нормы равны 1, то система называется ортонормированной, для которой выполняется условие:
a
m(x) n(x)dx = mn
b
где
(
mn =
0 m 6= n
1 m = n
Всякую систему, несодержащую ф-ю с нулевой нормой можно нормировать. Для этого достаточно каждую ф-ю разделить на ее норму. Пусть f(x) - ф-я, определенная на [a; b] и
Qm(x) = c0 0(x) + c1 1(x) + ::: + cm m(x) (2)
обобщенный полином.
В выражении (2) c0; c1; :::; cm - постоянные коэффициенты.
Рассмотрим задачу о приближении ф-и f(x). Требуется данную ф-ю заменить обобщенным полиномом Qm(x) заданного порядка m так, чтобы отклонение в смысле предъявленного критерия ф-и f(x) от обобщенного полинома Qm(x) на отрезке [a; b] было наименьшим. Пусть критерием приближения является минимум величины
a
Im = [Qm(x) f(x)]dx ! min (3)
b
Такая задача называется задачей интегральной квадратичной аппроксимации ф-и на отрезке. Подставим в (3) выражение (2) для полинома Qm(x) получим
a m
Im = [Pci i(x)dx f(x)]2dx (4)
b i=0
Для определения коэффициентов ci имеем
1 @Im |
a |
m |
|
= |
2 |
j(x)dx = 0 j = 0; 1; :::; m (5) |
|
2 @cj |
[Pci i(x) f(x)] |
После упрощения система (5) примет вид
m a |
a |
|
|
P
ci i(x) j(x)dx = f(x) j(x)dx (6)
i=0 b |
b |
В силу ортогональности f i(x)g выполняются следующие равенства
a
i(x) j(x)dx = 0
b
Поэтому
aa
cj Q2j (x)dx = f(x) j(x)dx
bb
Полагаем, что среди i(x) нет ф-ий с нулевой нормой, получим, что
a
f(x) j(x)dx
cj = |
b |
|
|
(7) |
|
a |
|
||
|
|
Q2(x)dx |
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
b |
|
|
В знаменателе (7) стоит квадрат нормы j(x) поэтому |
|
|||
|
a |
|
|
|
|
f(x) j(x)dx |
|
||
cj = |
b |
|
|
(8) |
|
jj j(x)jj2 |
|||
65
В случае ортонормированной системы
a
cj = f(x) j(x)dx (9)
b
Коэффициенты (8) - коэффициенты Фурье ф-и f(x) относительно заданной ортогональной системы. Доказано, что обобщенный полином с коэффициентами Фурье данной ф-и обладает наименьшим квадратичным отклонением от этой ф-и по сравнениею со всеми другими полиномами порядка m.
Найдем оценку отклонения (4) для случая, когда ci являются коэффициентами Фурье. Имеем
Im |
b |
|
m |
|
b |
|
m |
|
|
m |
i2(x) + 2 cick i(x) k(x)]dx |
|
= [f(x) ci i(x)]2dx = [f2 |
(x) 2f(x) ci i(x) + |
ci2 |
||||||||||
|
|
|
P |
|
|
|
P |
|
P |
|
P |
|
|
a |
|
i=0 |
|
a |
|
i=0 |
|
i=0 |
|
i<k |
|
Переходя от интеграла суммы к сумме интегралов, получим |
|
|
|
|||||||||
|
Im = |
b |
(x)dx 2 |
m |
b |
|
m |
b |
(x)dx + 2 |
cick |
b |
|
|
f2 |
ci |
f(x) i(x)dx + |
ci2 |
i2 |
i(x) k(x)dx (10) |
||||||
|
|
|
|
P |
|
|
P |
|
|
P |
|
|
|
|
a |
|
i=0 |
a |
|
i=0 |
a |
|
i<k |
a |
|
Так как |
|
|
|
|
|
|
|
|
|
|
|
|
bb
f(x) i(x)dx = ci 2i (x)dx i = 0; 1; 2; :::
aa
и
b
i(x) k(x)dx = 0 при i 6= k
a
то, после приведения подобных слагаемых в формуле (10) получим:
bm b
Im = f2(x)dx Pc2i 2i (x)dx (11)
a |
i=0 a |
или
m
Im = jjf(x)jj2 Pc2i jj (x)jj2 (12)
i=0
Так как Im > 0, то из формулы (12) получается так называемое неравенство Бесселя.
m
Pc2i jj (x)jj2 6 jjf(x)jj2 (13)
i=0
В частности при m ! 1 получаем
1
Pc2i jj (x)jj2 6 jjf(x)jj2
i=0
Если система 0(x); 1(x); :::; m(x); ::: ортонормирована, то формулы (12) (13) упрощаются и имеют вид:
m
Im = jjf(x)jj2 Pc2i (14)
i=0
m
Pc2i 6 jjf(x)jj2 (15)
i=0
Обобщенный полином Qm(x) с коэффициентами Фурье обладает следующими важными свойствами:
1.При увеличении числа слагаемых m младшие коэффициенты cj, как следует из формулы (8) остаются неизменными.
b
2. При увеличении m квадратичная погрешность Im = [Qm(x) f(x)]2dx в силу формулы (11) монотонно
a
убывает. То есть погрешность I1 > I2 > ::: > Im > Im+1 > ::: Это означает, что присоединение новых слагаемых увеличивает точность апроксимации.
66