

17.От чего зависит затухание колебательных переходных процессов в двигателе?
18.Как получить передаточную функцию двигателя по возмущающему воздействию?
19.Что определяет характер протекания переходных процессов в двигателе?
20.В каком случае переходные процессы в двигателе будут колебательными?
|
|
|
|
|
|
Uof |
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wоf (p) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Y1 |
|
|
|
|
|
|
|
|
||||
Uз |
|
∆u |
|
|
U |
|
|
|
|
|
|
|
|
|
|
Y2 |
|
|
|
Y3 |
|||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
(p) |
|
|
W |
(p) |
|
W |
(p) |
|
W |
(p) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
рег |
|
|
|
|
ор1 |
|
|
|
|
|
ор2 |
|
|
|
ор3 |
|
|
|
|
Uоc1 |
W |
(p) |
Uоc2 |
о1 |
|
|
Wо2 (p) |
|
Uоc3 |
|
|
|
Wо3 (p) |
|
|
|
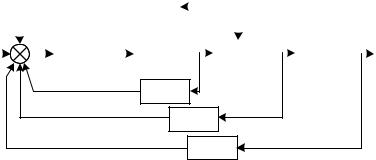
Рис. 3.1. Структурная схема СУЭП с параллельными обратными связями
ГЛАВА 3. СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ С ПАРАЛЛЕЛЬНЫМИ ОБРАТНЫМИ СВЯЗЯМИ
3.1. Общие понятия и определения
Системы управления электроприводов с параллельными обратными связями имеют один регулятор, на вход которого заводят обратные связи по регулируемым координатам. Структурная схема такой
системы приведена на рис. 3.1, на которой Uз - напряжение задания; Wрег (p) - передаточная функция регулятора; Wорi (p) - передаточная функция объекта регулирования i-ой координаты; Yi - регулируемая i-ая координата; Wоi (p) - передаточная функция цепи обратной связи i-ой координаты; Uосi -напряжение обратной связи i-ой координаты; f - возмущающее воздействие; Wоf (p) - передаточная функция цепи
73

обратной связи по возмущению; Uоf - напряжение обратной связи по возмущению; ∆u -ошибка регулирования.
|
|
|
|
|
|
Uof |
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wоf (p) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Uз |
|
∆u |
|
|
U |
|
|
|
|
|
|
Y1 |
|
|
|
|
Y2 |
|
|
|
Y3 |
||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
(p) |
|
|
W |
(p) |
|
W |
(p) |
|
W |
(p) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
рег |
|
|
|
|
ор1 |
|
|
|
|
|
ор2 |
|
|
|
ор3 |
|
|
|
|
Uоc1 |
W |
(p) |
Uоc2 |
о1 |
|
|
Wо2 (p) |
|
Uоc3 |
|
|
|
Wо3 (p) |
|
|
|
Рис. 3.1. Структурная схема СУЭП с параллельными обратными связями
Система управления электроприводом с обратной связью по регулируемой координате носит название замкнутой.
В замкнутой системе регулирования сигнал управления формируется из напряжения задания и напряжения обратной связи, несущего информацию о фактическом значении регулируемой координаты Y, которое зависит от возмущений, действующих на узлы системы и рабочий орган электропривода. В результате введения обратной связи ошибка регулирования уменьшается до допустимого
значения. Сигнал управления U системы электропривода с обратной связью представляет собой отклонение (ошибку) регулирования
относительно напряжения задания Uз . При этом ни одно из
возмущающих воздействий не измеряется, а их влияние на регулируемую координату воспринимается системой по каналу обратной связи. Следовательно, в системах с отрицательной обратной связью по выходной координате реализуется управление по отклонению.
Обратная связь представляет собой канал передачи и преобразования информации с выхода системы регулирования или ее узлов на вход с целью формирования результирующего сигнала управления. Обратные связи классифицируют:
• По знаку воздействия обратная связь может быть отрицательной, если полярности сигналов задания и обратной связи
74