

скорости, отличная от нуля ∆uсc = uзсmax − kосωс1 > 0 и на выходе РС будет сформировано напряжение задания якорного тока, соответствующее величине момента нагрузки на валу электродвигателя
uзт = kрс∆ucc = kотIc1 . Электродвигатель будет работать в установившемся режиме (т. c на характеристиках рис.5.26 и 5.27) со скоростью ωс1 и током Ic1 (моментом Мс1 ).
На рис.5.33,б представлена фазовая траектория ω = f (Ia ) ,
соответствующая переходным процессам рис.5.33,а (переход из т. h в
т. c ).
При пуске под «отсечку» РС находится в ограничении, поэтому обратная связь по скорости не влияет на работу РС, говорят, что обратная связь по скорости разомкнута, при этом на валу электродвигателя формируется максимальный момент, поэтому ускорение при разгоне электропривода будет зависеть от величины момента нагрузки на валу электродвигателя и будет разным при разных моментах нагрузки, что является недостатком такого способа пуска.
5.2.2. Реакция однократной СУЭП на возмущающее воздействие
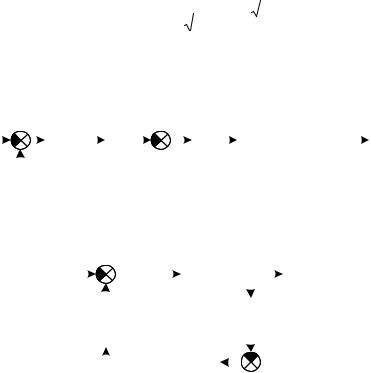
Рассмотрим реакцию однократноинтегрирующей СУЭП на возмущающее воздействие. Исходные структурные схемы представлены на рис.5.34, где входной координатой является возмущающее
воздействие – ток статический Ic , а выходной координатой – ток якоря Ia (рис.5.34,а) и статическая просадка скорости ∆ωс (рис.5.34,б).
Для первой структурной схемы передаточная функция замкнутого контура регулирования определится:
W |
(p) = |
Ia (p) |
= |
|
|
1 |
|
= |
|||
|
Ic |
|
I (p) |
|
|
T p |
|
kот (2Tµp(Tµp +1) +1) |
+1 |
||
|
|
|
c |
|
|
м |
|
|
|
||
|
|
|
|
|
|
Rэ / с |
|
|
kосkрс |
(5.31) |
|
= |
|
|
|
1 |
|
|
|
|
. |
|
|
4Tµp(2Tµp(Tµp +1) +1) +1 |
|
|
|||||||||
Передаточной функции (5.31) соответствует переходная функция |
|||||||||||
системы |
третьего |
порядка, |
|
настроенной на |
МО, h3 (τ) с |
||||||
|
|
|
|
|
|
|
175 |
|
|
|
|
перерегулированием 8,0% и временем нарастания 7,6 Tµ (таблица 1),
поэтому изменение во времени якорного тока при скачке возмущающего воздействия будет описываться следующей зависимостью:
|
|
|
|
|
|
|
|
Ia (τ) = Ic (1 |
−e−2τ − |
2 |
|
e−τ sin( |
|
|
τ)), |
|
|
|
|
|
|||||||||||||||||||
|
|
|
3 |
(5.32) |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где τ = t / 4Tµ - относительное время. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Iс |
|
|
|
|
|
ЭМП |
|
|
|
|
|
uос |
∆uс |
РС |
uзт |
|
|
|
|
|
|
ЗТК |
|
|
Ia |
|||||||||||||
|
|
|
|
|
Rэ / с |
ω |
|
|
|
|
|
|
|
|
1/ kот |
|
|
||||||||||||||||||||||
|
|
|
|
|
kос |
kрс |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|||||||||||||||
|
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iс |
|
|
|
|
|
|
|
|
|
|
ЭМП |
−∆ωc |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ / с |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
ЗТК |
|
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
2Tµp(Тµр + |
1) +1 |
|
|
uзт |
|
РС |
|
|
u |
ос |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆uс |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
б)
Рис.5.34. Структурные схемы однократноинтегрирующей СУЭП по возмущению
Передаточная функция для схемы рис.5.34,б будет определяться следующей зависимостью:
176

W'Ic (p) = − |
∆ωc (p) |
= − |
|
|
|
|
|
1 |
|
= |
|||
|
T p |
|
|
|
|||||||||
|
I |
|
(p) |
|
|
+ |
kосkрс / kот |
||||||
|
|
c |
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
R |
э |
/ с |
(2T p(T p +1) +1) |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
µ |
µ |
|
|
|
= − |
R |
э |
4Tµ |
|
|
|
(2Tµp(Tµp +1) +1) |
|
|
|
= |
|
||||||
с |
T |
|
4T p(2T p(T p +1) |
+1) |
+1 |
|
||||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
м |
|
|
µ |
|
µ |
|
µ |
|
|
|
|
|
|
|
(5.33) |
|
R |
|
4Tµ |
|
|
1 |
|
2Tµ |
|
|
2Tµ2 |
|
|
|||||
= − |
э |
( |
+ |
p + |
|
p2 ), |
|
|||||||||||
с |
T |
Q |
(p) |
Q |
(p) |
|
Q |
(p) |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
м |
|
|
3 |
|
|
3 |
|
|
3 |
|
|
|
|
|
|
где Q3 (p) - полином 3-го порядка системы, настроенной на МО (таблица
1).
В уравнении (5.33) выражению в скобках будут соответствовать следующие переходные функции: для первой составляющей 1/ Q3 (p) - переходная функция системы третьего порядка, настроенной на МО, h3 (τ) , для второй составляющей 2Tµp / Q3 (p) - первая производная
h3' (τ) (т.к. p = d / dt - есть оператор дифференцирования), для третьей составляющей 2Tµ2p2 / Q3 (p) - вторая производная h3'' (τ) .
Если выполнить данные математические преобразования, то можно получить следующее выражение для изменения во времени скорости (статической просадки по скорости) при скачкообразном приложении возмущающего воздействия:
∆ω (τ) = −I |
|
R |
э |
4Tµ |
(h |
|
(τ) + |
1 |
h' |
(τ) |
+ |
1 |
h'' |
(τ)) = |
||||||||||
|
|
|
T |
|
2 |
8 |
||||||||||||||||||
с |
|
c |
с |
|
|
|
3 |
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.34) |
|||
|
4Tµ |
|
|
|
|
e−2τ |
|
e−τ |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
(1 |
|
|
|
(sin( |
|
3τ) + |
|
3 cos( 3τ)), |
|||||||||||||||
= −∆ω |
|
|
− |
|
− |
|
|
|
|
|
||||||||||||||
Tм |
2 |
|
|
|
||||||||||||||||||||
раз |
|
|
|
|
|
|
2 3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где τ = t / 4Tµ - относительное время.
На рис.5.35 показана реакция системы регулирования скорости (модель на рис.5.30) Ia , ∆ωc =f(t) на скачкообразное задание
177
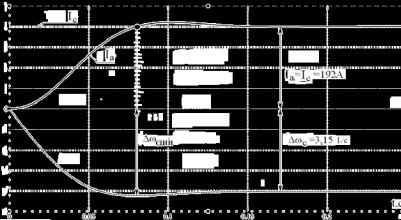
статического тока Ic =192А при uзс =0. Пока ток электродвигателя меньше тока статического ( Ia < Ic ) просадка по скорости уменьшается и при Ia = Ic ( tн = 7,6Tµ ) достигается максимальная просадка скорости
∆ωдин ≈ ∆ωс , перерегулирование якорного тока составляет 8%.
Вследствие малого перерегулирования полного восстановления скорости не происходит, в результате чего имеет место статическая просадка
скорости, равная ∆ω = −I |
R |
э |
4Tµ |
= −192 |
0,115 0,04 |
= −3,15 с-1. |
|
T |
3,5 0,08 |
||||
c |
c с |
|
|
|||
|
|
|
м |
|
|
|
Общее время реакции электропривода составляет примерно 10 Tµ .
Рис.5.35. Реакция однократной СУЭП на возмущающее воздействие
В результате рассмотрения однократноинтегрирующей СУЭП можно сделать следующие выводы:
•однократноинтегрирующая система регулирования является астатической по заданию и статической по возмущению;
•динамические характеристики системы регулирования зависят от некомпенсируемой постоянной времени Tµ ;
•статическая просадка скорости зависит от соотношения постоянных времени 4Tµ / Tм .
178
Контрольные вопросы:
1.Какой режим пуска носит название «пуск под отсечку»?
2.Поясните переходные процессы пуска под отсечку на холостом ходу и под нагрузкой (в чем их отличие и почему).
3.Как получается уравнение переходного процесса тока якоря при набросе нагрузки?
4.Как получается уравнение переходного процесса скорости при набросе нагрузки?
5.3.Настройка контура регулирования скорости в двукратноинтегрирующей СУЭП
Втех случаях, когда статическая просадка скорости не удовлетворяет технологическим требованиям к электроприводу, применяют двукратноинтегрирующую систему регулирования, которая получается дополнением однократной системы регулирования скорости
еще одним контуром регулирования скорости [1,2,7,8].
Структурная схема двукратной системы регулирования скорости представлена на рис.5.36, где показан дополнительный регулятор скорости РС2 с дополнительной обратной связью по скорости.
uзс |
|
|
|
|
РС2 |
|
|
|
|
|
РС1 |
uзт |
|
|
|
|
|
|
|
Ia |
|
ω |
||||
|
|
|
|
1/ kот |
|
|
Rэ / с |
|||||||||||||||||||
|
|
|
|
Wрс2 (p) |
|
|
|
|
|
kрс |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) |
+1 |
|
|
Тмр |
|
|
1 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
uос |
|
|
uос |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
i = |
2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i = 3 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.5.36. Структурная схема двукратной системы регулирования скорости
Передаточная функция РС2 определяется в соответствии с (5.11) для настройки на МО третьего контура регулирования:
W |
(p) = |
1 |
kос |
= |
1 |
. |
(5.35) |
|
|
8T p |
|||||||
РС2 |
|
23 T p k |
ос |
|
|
|
||
|
|
µ |
|
|
µ |
|
|
|
|
179 |
|
|
|
|
|
|
|
Таким образом, получили интегрирующий РС, который сводит ошибку регулирования скорости ∆uс = uзс − uос к нулю, поэтому статическая просадка скорости в данной системе регулирования также будет равна нулю ∆ωс = 0 .
Преобразуем исходную структурную схему рис.5.36, для чего перенесем обратную связь по скорости со входа РС1 на вход РС2 (рис.5.37,а), после чего параллельные обратные связи по скорости заменим одной обратной связью (рис.5.37,б). Затем форсирующее звено
8Tµp +1 из цепи обратной связи по скорости перенесем в прямой канал регулирования в передаточную функцию общего РС (рис.5.37,в).
180
|
|
|
uзс |
|
|
|
РС2 |
РС1 |
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
|
|
ω |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
Rэ / с |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
uзс |
|
|
|
|
|
|
|
РС2 |
|
|
РС1 |
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
ω |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
Rэ / с |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|
Тмр |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp +1 |
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
|
ω |
|
||||||||||
|
|
|
|
|
uзс |
|
|
|
|
|
|
|
8T p +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
|
Rэ |
/ с |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uос |
8Tµp |
|
|
|
|
|
|
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|
Тмр |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ДФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
|
|
|
||||||||||
uз |
|
|
|
1 |
|
|
|
|
|
uзс |
|
|
|
|
|
|
|
8T p +1 |
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
Rэ / с |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
kрс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
8Tµp +1 |
|
|
|
|
|
|
|
|
uос |
|
|
8Tµp |
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
Тмр |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
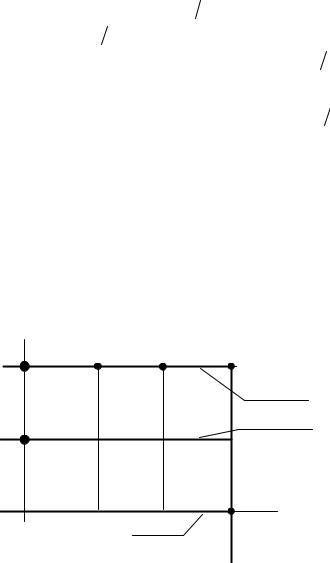
Рис.5.37. Преобразования структурной схемы двукратноинтегрирующей системы регулирования скорости
В результате выполненных преобразований |
получается |
следующая передаточная функция общего РС: |
|
181 |
|
W |
(p) = |
8Tµp +1 |
k |
|
= k |
|
+ |
k |
РС |
= k |
|
+ |
1 |
|
, (5.36) |
|
8T p |
|
|
|
8T p |
|
T |
p |
|||||||||
РС |
|
|
РС |
|
РС |
|
|
РС |
|
|
||||||
|
|
µ |
|
|
|
|
|
|
|
µ |
|
|
|
РС |
|
|
где kРС - коэффициент передачи П-РС (5.26); |
|
|
|
|
||||||||||||
TРС = 8Tµ / kРС |
- постоянная времени интегрирования РС. |
|||||||||||||||
В итоге получился один регулятор скорости, имеющий ПИ структуру. Поскольку в передаточной функции РС в числителе появилось
форсирующее звено 8Tµp +1, то в этом случае при прохождении
управляющего сигнала задания скорости uзс через РС, возрастает
перерегулирование при отработке заданного значения якорного тока. Для
снижения величины перерегулирования якорного тока на входе РС со стороны задания включают дополнительный фильтр ДФ с передаточной функцией обратной по отношению к передаточной
функции форсирующего звена: WДФ (p) =1/(8Tµp +1) (рис.5.37,г).
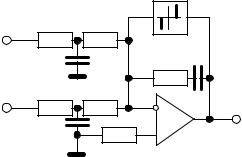
Принципиальная электрическая схема ПИ – РС, реализованного на операционном усилителе, показана на рис.5.38, на которой БОэто блок ограничения выходного напряжения РС (напряжения задания величины якорного тока) для ограничения якорного тока электродвигателя на заданном уровне.
Передаточные функции РС по цепи задания uзс и цепи обратной
связи по скорости uос электродвигателя для схемы РС, представленной на рис.5.38, будут иметь вид:
W |
(p) = uзт (p) = |
|
R6C2p +1 |
|
||
|
|
|
||||
РС |
|
uзс (p) |
|
2R4C2p(0,5R4C3p +1) |
|
|
|
|
|
(5.37) |
|||
|
|
uзт (p) |
|
|
R6C2p +1 |
|
W |
(p) = |
= |
|
|
||
|
|
|
||||
РС |
|
uос (p) |
|
2R5C2p(0,5R5C4p +1) |
|
|
|
|
|
|
|||
182
|
R4 |
R4 |
БО |
+uзс |
|
||
|
|
|
|
|
C3 |
|
R6 C2 |
- uос |
R5 |
R5 |
-uзт |
|
C4 |
|
|
|
|
|
Рис.5.38. Принципиальная электрическая схема ПИ РС
Для обеспечения одинакового коэффициента передачи РС по входам задания и обратной связи по скорости необходимо выполнить
равенство сопротивлений резисторов R4 |
= R5 . |
Параметры РС |
|||||
рассчитываются с учетом (5.36) |
и (5.37) |
на основании |
равенств: |
||||
R6С2 = 8Tµ , |
2R4С2 |
= 8Tµ / kРС = TРС . Задавшись величиной емкости |
|||||
конденсатора |
C2 можно рассчитать значение величины сопротивлений |
||||||
R6 и R4 |
= R5 . По входу задания |
uзс реализован дополнительный |
|||||
фильтр, |
параметры |
которого |
определяются |
из |
равенства: |
||
0,5R4С3 = 8Tµ , а в цепи обратной связи по ск |
орости |
uос |
реализован |
||||
фильтр для фильтрации помех в напряжении тахогенератора, постоянная времени которого Tф = 0,5R5С4 находится в пределах 2…5 мс и подбирается при наладке электропривода.
Структурная схема системы регулирования с объединенным РС позволяет пояснить происхождение таких терминов, как «двукратно-
интегрирующая система регулирования» и «симметричный оптимум». Первый термин связан со структурной схемой разомкнутой СУЭП. Передаточная функция разомкнутой системы регулирования (без учета дополнительного фильтра на входе РС и подстановке значения
kрс из (5.26) получается из структурной схемы |
рис.5.37,г при |
размыкании цепи обратной связи по скорости |
и определяется |
следующим выражением: |
|
183 |
|
W |
(p) = |
u |
ос |
(p) |
= |
|
8Tµp +1 1 |
|
|
1 |
|
≈ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
u |
(p) |
|
|
8T p 4T p 2T2p2 |
+ 2T p +1 |
|||||||||||||||
|
разс |
|
|
зс |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
µ |
µ |
µ |
µ |
|
(5.38) |
||||
|
8Tµp +1 |
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
≈ |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
8Tµp 4Tµp 2Tµp +1 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
Как видно из (5.38) в передаточную функцию входят форсирующее звено первого порядка, оптимальное звено второго
порядка и два интегрирующих звена с постоянными интегрирования 4Tµ
и8Tµ . Отсюда происходит название СУЭП – двукратно-
интегрирующая (ПИ-РС и ПИ-РТ).
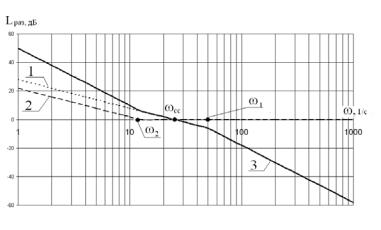
Из передаточной функции (5.38) видно, что она получилась дополнением передаточной функции ПИ регулятора скорости к передаточной функции разомкнутой системы регулирования с П регулятором скорости. Поэтому ЛАЧХ разомкнутого контура регулирования скорости получается суммированием ЛАЧХ ПИ – РС и ЛАЧХ разомкнутого контура регулирования скорости с П – РС. На рис.5.39 показано построение идеализированной ЛАЧХ (замкнутый токовый контур – апериодическое звено) разомкнутого конура регулирования скорости в двукратно - интегрирующей СУЭП.
Рис.5.39. ЛАЧХ разомкнутого контура регулирования скорости
184
На рис.5.39 показана ЛАЧХ разомкнутого контура регулирования |
|||||||||
скорости с П – РС (номер 1) имеющая наклон -20 дБ/дек на частоте среза |
|||||||||
контура регулирования скорости |
ωСС =1 4Tµ |
и -40 дБ/дек после |
|||||||
частоты сопряжения ω1 =1 2Tµ . Под номером 2 |
представлена ЛАЧХ |
||||||||
ПИ - РС с наклоном -20 дБ/дек до частоты сопряжения ω2 |
=1 8Tµ и |
||||||||
наклоном 0 дБ/дек после частоты сопряжения. Под номером 3 показана |
|||||||||
результирующая ЛАЧХ с наклонами «-40» - «-20» - «-40» дБ/дек, которая |
|||||||||
получилась симметричной |
относительно частоты |
среза ωСС =1 4Tµ . |
|||||||
Отсюда происходит название варианта настройки контура |
|||||||||
регулирования: настройка на симметричный оптимум (СО). |
|
||||||||
Преобразования структурной схемы на рис.5.36 и 5.37 показали, |
|||||||||
что настройка на МО для одной и той же регул |
|
ируемой координаты |
|||||||
(скорости) дважды привело к симметричному оптимуму. |
|
||||||||
Так как при настройке на СО регулятор скорости имеет |
|||||||||
интегральную |
составляющую, |
то |
ошибка |
регулирования |
скорости |
||||
∆uс = uзс − uос |
всегда |
будет |
сведена |
к |
нулю, |
поэтому |
|||
электромеханические (механические) характеристики электропривода в |
|||||||||
двукратноинтегрирующей системе регулирования будут абсолютно |
|||||||||
жесткими (рис.5.40). |
|
|
|
|
|
|
|
||
ω0max |
ω |
|
|
|
|
|
|
|
|
d |
|
с |
|
b |
a |
|
|
|
|
|
|
|
|
|
|
|
|
uзс = uзсmax |
|
0.5ω0max |
|
|
|
|
|
|
|
uзс = 0,5uзсmax |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
Ic1(Мс1) |
Ic2 (Мс2 ) |
|
h |
Ia (M) |
|
|
|
|
|
|
uзс = 0 |
|
Imax (Мmax ) |
|
||
|
|
|
|
|
|
|
|
||
Рис.5.40. Электромеханические (механические) характеристики |
|||||||||
электродвигателя в двукратноинтегрирующей СУЭП |
|||||||||
185
Рассмотрим принцип работы двукратноинтегрирующей системы регулирования на примере характеристик рис.5.40.
Предположим, что электродвигатель работает в режиме идеального холостого хода Iс = 0, когда на вход РС подано
максимальное напряжение задания скорости вращения uзсmax =10В, поэтому в установившемся режиме работы электродвигатель будет работать в т. d характеристики на рис.5.40. При этом в цепи обратной связи по скорости напряжение будет равно: uос = kосω0 max =10В, поэтому ошибка регулирования на входе РС будет равна нулю ( ∆uс = uзсmax − uос =0), напряжение на выходе РС также будет равно
нулю ( uзт =0) и ток якоря будет равен нулю.
Если на валу электродвигателя появится момент нагрузки Мс1 , то скорость электродвигателя начнет уменьшаться. На входе РС появится положительная ошибка ∆uс = uзсmax − uос > 0 , поэтому выходное
напряжение РС начнет увеличиваться, вследствие чего начнет увеличиваться якорный ток и момент электродвигателя, под действием которого скорость вращения электродвигателя восстановится до
заданной ω = ω0 max , при этом на входе РС ошибка регулирования
скорости опять станет равной нулю ∆uс = uзсmax − uос =0, однако
выходное напряжение РС будет отлично от нуля. На выходе РС будет напряжение, которое он «наинтегрировал», пока на его входе
существовала |
ошибка |
регулирования |
∆uс |
= uзсmax − uос |
> 0 , |
причем |
величина этого напряжения uзт = kотIс1 |
будет соответствовать величине |
|||||
статического |
тока Iс1 , создающего |
электромагнитный |
момент |
|||
электродвигателя, |
уравновешивающий |
момент |
нагрузки |
|||
Ma = kФнIс1 = Mс1 . |
Поэтому электродвигатель будет |
работать в |
||||
установившемся режиме в т. c характеристики на рис.5.40.
Работе на участке ограничения выходного напряжения РС соответствует абсолютно мягкая электромеханическая (механическая)
характеристика электродвигателя (участок a − h на рис.5.40).
Следовательно, двукратноинтегрирующая система регулирования скорости электродвигателя является астатической как по заданию, так и по возмущению.
186

Рассмотрим динамические свойства двукратноинтегрирующей системы регулирования скорости электродвигателя по задающему и возмущающему воздействиям.
Выполним моделирование реакции линейной системы регулирования (без ограничения выходного напряжения РС) с ПИ-РС на
скачкообразное задание uзсmax =10В. Для схемы модели системы
регулирования с П-РС добавим звено ПИ –РС и добавочный фильтр ДФ на входе РС, в результате чего схема модели примет вид, представленный на рис.5.41.
Рис.5.41. Схема модели двукратноинтегрирующей СУЭП
Сравнительная реакция однократно - интегрирующей и двукратно - интегрирующей систем регулирования скорости электродвигателя на
скачкообразное задание uзсmax =10В показана на рис.5.42.
Переходные процессы, соответствующие настройке системы регулирования на МО, представлены под номерами 1 и 2, а настройке на СО – под номерами 3 и 4. Кривые 1 и 3 представляют изменение во
времени напряжений обратных связей по току uот = f(t), а кривые 3 и 4 - изменение во времени напряжений обратных связей по скорости, увеличенных для наглядности в 10 раз 10* uос = f(t). Переходный процесс скорости (кривая 4) соответствует оптимальному переходному процессу
187
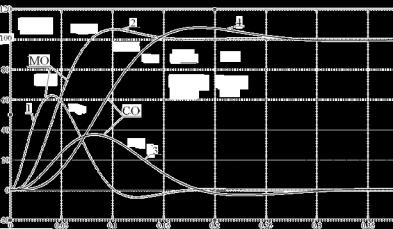
четвертого порядка с перерегулированием σ= 6,2% и временем нарастания tн = 14,4 Tµ (таблица 1).
Как видно из рис.5.42, двукратная система регулирования на управление реагирует медленнее, чем однократная, и имеет примерно то же перерегулирование по скорости.
Рис. 5.42. Реакция линейных систем регулирования скорости на скачкообразное задающее воздействие
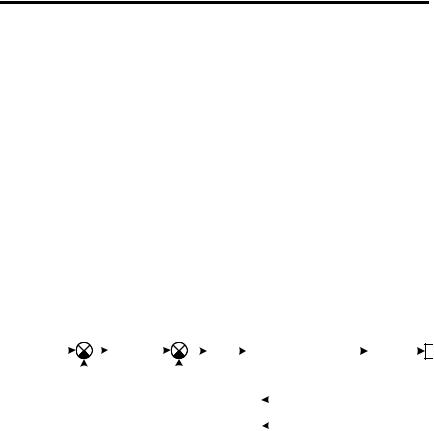
Определим передаточные функции замкнутой двукратно - интегрирующей системы регулирования скорости по возмущающему воздействию. Исходные структурные схемы СУЭП представлены на рис.5.43. Структурной схеме на рис.5.43,а (входное воздействие – тока статический, выходной параметр – якорный ток) соответствует передаточная функция, определяемая следующим выражением:
W (p) = |
Ia (p) |
= |
|
|
|
1 |
|
|
= |
|
Ic |
I (p) |
|
T p |
|
8Tµp |
|
kот (2Tµp(Tµp +1) |
+1) |
+1 |
|
|
c |
|
м |
|
|
|
|
|
||
|
|
|
Rэ /с (8Tµp +1) |
|
kосkрс |
|
|
|
||
|
8Tµp +1 |
|
|
= |
|
. |
(5.39) |
64Tµ4p4 + 64Tµ3p3 +32Tµ2p2 +8Tµp +1 |
|||
|
188 |
|
|

Передаточная функция для структурной схемы рис.5.43,б (входное воздействие – тока статический, выходной параметр – статическая просадка скорости) примет вид:
W'Ic (p) = − |
∆ωc (p) |
= − |
|
|
|
|
|
|
|
1 |
|
= |
||
|
T p |
|
8Tµp +1 |
|
|
|||||||||
|
I |
(p) |
|
|
+ |
kосkрс / kот |
||||||||
|
c |
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
R |
э |
/ с |
8T p |
(2T p(T p +1) +1) |
||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
µ |
|
µ |
µ |
|
|
|
= − |
R |
э |
8Tµ |
|
|
4Tµp(2Tµp(Tµp +1) |
+1) |
. |
(5.40) |
||
с |
T |
|
(64T |
4p4 |
+ 64T3p3 |
+32T2p2 |
+8T p +1) |
||||
|
|
|
|
|
|||||||
|
|
|
м |
µ |
µ |
µ |
µ |
|
|
||
Как видно из (5.39) и (5.40) знаменатель передаточных функций соответствует оптимальному полиному четвертого порядка. После соответствующих математических преобразований можно получить следующие выражения для переходных процессов в двукратно - интегрирующей СУЭП при скачкообразном приложении возмущающего воздействия:
Ia (τ) = Ic (1−e−2τ((1+ 6τ)cos(2τ) + 2(τ−1)sin(2τ))), (5.41)
∆ωс (τ) = −Ic Rэ 8Tµ e−2τ((1,5 + τ)sin(2τ) − 2τcos(2τ)), (5.42)
с Tм
где τ = t /8Tµ - относительное время.
Из последних выражений видно, что после затухания переходных процессов установившееся значение статической просадки скорости
равно нулю ∆ωcуст =0, а установившееся значение якорного тока будет равно возмущающему воздействию, т.е. Iaуст = Iс .
Смоделируем переходные процессы в двукратно - интегрирующей системе регулирования скорости при скачкообразном приложении статического тока, равного номинальному току электродвигателя в соответствии с моделью на рис.5.41 и сравним их с соответствующими переходными процессами в однократно - интегрирующей системе
189
регулирования. Сравнительные переходные процессы представлены на рис.5.44.
|
|
|
|
|
|
|
ЭМП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РС |
|
uзт |
|
ЗТК |
Ia |
||||||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uос ∆uс |
|
|
|
|
|
|
|
|
|
||||||||||||||
с |
|
|
|
|
Rэ / с |
ω |
|
|
|
8T p +1 |
|
|
1/ k |
от |
|
||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
µ |
|
|
kрс |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
Ia |
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЭМП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Iс |
|
|
|
|
|
|
|
|
|
|
|
|
Rэ / с |
−∆ωc |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ЗТК |
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
1/ kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2Tµp(Тµр +1) +1 |
|
|
РС |
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
uзт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
k |
рс |
8Tµp +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8Tµp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆uс |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
б)
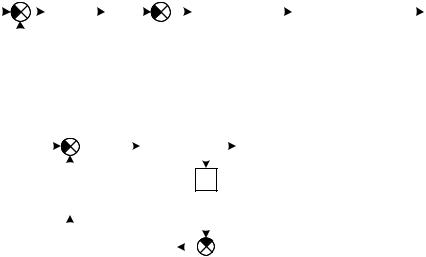
Рис.5.43. Структурные схемы двукратноинтегрирующей СУЭП по возмущению
Переходные процессы под номерами 1 и 2 соответствуют настройке системы регулирования на МО, а под номерами 3 и 4 – настройке на СО (1 и 3 – зависимости изменения во времени напряжений
обратной связи по току якоря uот = f(t), 2 и 4 – напряжений обратной связи по скорости 10* uос = f(t)).
Как видно из рис.5.44 принципиальное отличие реакции СУЭП, настроенной на СО, состоит в том, что после вызванного увеличением нагрузки на валу электродвигателя временного (динамического) падения скорости происходит восстановление скорости до заданной величины.
190
Важнейшими показателями качества регулирования являются
максимальное динамическое падение скорости и время ее восстановления:
∆ω |
≈ 0,95∆ω |
|
8Tµ I |
с |
, |
||
|
|
|
|
|
|||
раз T |
|
I |
|||||
дин |
|
|
н |
(5.43) |
|||
|
|
|
м |
|
|
|
|
tвосст ≈15,5Tµ.
Восстановление скорости происходит в результате действия интегральной составляющей РС за счет повышенного перерегулирования тока (момента), составляющего примерно 54%.
Рис.5.44. Реакция СУЭП на возмущающее воздействие
Возможно использование варианта ПИ регулятора скорости, обеспечивающего «минимальный показатель колебательности» системы регулирования [9,14,15], с передаточной функцией:
Wрс (p) = |
8Tµp +1 |
|
|
. |
(5.44) |
|
25,6Tµ2 |
Rэkос |
|
||||
|
p |
|
||||
|
|
|
||||
|
|
сT k |
от |
|
|
|
|
|
м |
|
|
|
|
|
191 |
|
|
|
|
|

Из сопоставления свойств одно- и двукратноинтегрирующих систем регулирования скорости можно сделать следующие выводы:
•Двукратные СУЭП обладают астатизмом первого порядка как по задающему, так и по возмущающему воздействиям и поэтому относятся к классу астатических систем регулирования.
•Более простую реализацию имеют однократные СУЭП (РС пропорциональный и нет входного добавочного фильтра).
•Более быструю реакцию на задающее воздействие имеют также однократные СУЭП.
•Более благоприятную реакцию на возмущающее воздействие имеют двукратные СУЭП (установившаяся просадка скорости равна нулю), однако при этом значительно возрастает перерегулирование якорного тока (момента) электродвигателя.
Исходя из этих свойств, определяется выбор структуры СУЭП в зависимости от конкретных требований к электроприводу с точки зрения обеспечения заданного технологического процесса.
Контрольные вопросы:
1.Когда применяется двукратная система регулирования скорости?
2.Как получить передаточную функцию регулятора скорости в двукратной СУЭП?
3.Поясните вид механических характеристик в двукратной СУЭП. Как работает система регулирования при возрастании момента нагрузки?
4.С какой целью устанавливают фильтр во входной цепи регулятора скорости, чему равна постоянная времени фильтра?
5.Как выполняется реализация регулятора скорости в двукратной СУЭП на операционном усилителе?
6.Почему двукратная СУЭП получила название настройки на «симметричный оптимум»?
7.Сравните динамические свойства однократной и двукратной СУЭП (для объяснения используйте переходные процессы реакции на скачкообразное задание).
8.Как получаются уравнения переходных процессов изменения тока и скорости при набросе нагрузки в двукратной СУЭП?
9.Сравните переходные процессы при набросе нагрузки в однократной и двукратной СУЭП, объясните их различие.
192