


D = ϕz−1 . |
(2.11) |
• Направление регулирования – вверх или вниз от основной скорости зависит от способов регулирования. Различают однозонное регулирование вниз от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже основной.
• Экономичность регулирования – оценивается по капитальным
(для установки соответствующего оборудования) и эксплуатационным затратам.
Контрольные вопросы:
1.Что такое блокировка? Какие бывают блокировки в электроприводе?
2.Как классифицируют сигнализацию в схемах электропривода?
3.С какой целью может выполняться регулирование координат электропривода?
4.Что такое качество процесса регулирования?
5.Как определяют диапазон регулирования?
6.Какие параметры определяют диапазон регулирования?
7.Как можно расширить диапазон регулирования?
8.Что такое статизм?
9.Как определяют установившееся значение выходной координаты при отработке входного воздействия?
10.Какая система называется астатической?
11.Как определяется плавность и направление регулирования?
2.1.2. Динамические показатели качества регулирования
Динамические показатели качества регулирования оцениваются, как правило, по характеристике переходного процесса (реакции системы регулирования на скачкообразное входное воздействие).
Переходный процесс может быть колебательным или апериодическим, как показано на рис.2.2, и характеризуется следующими основными показателями.
54

Рис. 2.2. Переходная характеристика системы регулирования
•Время нарастания до заданного значения (время первого
согласования) tн (или t1) - время, когда регулируемая координата X первый раз достигает заданного значения;
•Время достижения максимума tmax - время, соответствующее первому максимальному превышению регулируемой координаты над заданным значением;
•Время переходного процесса tпп- время, начиная с которого регулируемая координата X входит и остается в зоне допустимых отклонений ±(2…5)% от заданной величины регулируемой координаты, характеризует быстродействие системы;
•Перерегулирование σ – это выраженное в процентах относительное превышение максимального значения регулируемой координаты над заданным значением, определяется зависимостью:
σ% = Xmax − Xуст 100% (обычно, σ%≤(5..10)%).
Xуст
• Число колебаний nk – равно числу переходов регулируемой координаты через установившееся значение за время переходного процесса tпп.
Иногда при оценке динамических свойств систем электропривода могут использоваться дополнительные показатели.
В отдельных случаях для оценки динамических свойств системы регулирования используют интегральные оценки качества. Основная идея, заложенная в таких оценках, с остоит в том, чтобы характеризовать
55
процесс регулирования одним числом, по величине которого можно было бы сделать определенные выводы о протекании переходного процесса в течение заданного интервала времени. Подобного вида оценки называются функционалами качества. Они записываются в виде
J0 = ∫T F{f(t)}dt . |
(2.12) |
0 |
|
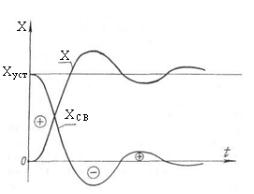
Из этого выражения следует, что численное значение J0 определяется видом функции F, характером протекания во времени изучаемого параметра f(t) и интервалом времени протекания переходного процесса [0,T]. В качестве изучаемого параметра f(t) при определении интегральных оценок J0 обычно используется свободная составляющая переходного процесса, определяемая из соотношения
Xсв (t) = Xуст − X(t) , |
(2.13) |
где Xсв (t) - свободная составляющая;
Xуст - установившееся значение регулируемого параметра;
X(t) -переходный процесс изменения изучаемого параметра.
Свободная составляющая Xсв (t) по существу представляет собой ошибку системы регулирования во времени переходного процесса.
На рис.2.3 показан типичный график переходного процесса X(t) и
его свободной |
составляющей |
Xсв (t) . |
Для идеальной |
системы |
регулирования |
Xсв (t) = 0 , т.е. идеальная система представляет собой |
|||
пропорциональное динамическое |
звено |
с передаточной |
функцией |
|
WU (p) = K . Поэтому, чем меньше величина J0, тем ближе система регулирования к идеальной.
Наиболее часто используется простая квадратичная интегральная оценка свободной составляющей вида:
56
J2 = ∞∫Xсв2 (t)dt |
(2.14) |
0 |
|
Рис. 2.3. Графики переходного процесса X(t) и егоcвободной составляющей XСВ(t)
Чем меньше будет сумма абсолютных величин площадей между Xсв2 (t) и осью времени на рис.2.3, тем меньше будет величина J2 и тем
выше будет быстродействие системы регулирования. Однако при этом перерегулирование и число колебаний могут быть достаточно большими. То есть простая квадратичная оценка не несет в себе достаточной информации о качестве процесса регулирования.
Для того чтобы иметь более точную характеристику динамических свойств системы в подынтегральное выражение квадратичной оценки
вводят слагаемое (dXсв (t) / dt)2 , учитывающее квадрат скорости
протекания переходного процесса. В результате комбинированная квадратичная интегральная оценка будет определяться соотношением
|
|
J2K = ∞∫[Xсв2 |
(t) + τ2 (dXсв (t) / dt)2 ]dt |
(2.15) |
||
|
|
|
|
0 |
|
|
6 |
< τ < |
3 |
|
|
|
|
где |
tпп |
|
tпп |
- |
постоянная времени оптимальной |
|
|
|
|
||||
экспоненты;
tпп – требуемое время переходного процесса.
57