

10. Выведите уравнение электромеханической характеристики в СУЭП с отрицательной обратной связью по напряжению.
3.2.1. Вырожденная структурная схема СУЭП с отрицательной обратной связью по напряжению
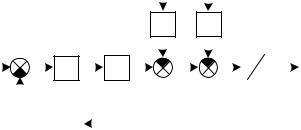
Вырожденная структурная схема СУЭП (рис. 3.5) с отрицательной обратной связью по напряжению получается из исходной структурной схемы (рис. 3.4) при p=0 и применятся для анализа статических режимов работы СУЭП.
Из структурной схемы (рис. 3.5) видно, что управляющим (задающим) воздействием является напряжение задания Uз на входе регулятора. Возмущающим воздействием является статический ток Iс, прикладываемый в двух точках системы регулирования к сумматорам Σ2 и Σ3.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ic |
|
|
Ic |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Rп |
Ra |
|
|
|
|||||||
Uз Σ1 ∆u |
|
Uу |
|
Ed |
|
|
Ud |
|
|
Еа |
|
ω |
|||||||||||
kр |
kп |
|
|
|
|
1c |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Uон |
|
|
|
|
|
Σ2 |
|
Σ3 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
kон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.3.5. Вырожденная структурная схема СУЭП с отрицательной обратной связью по напряжению
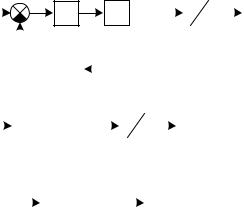
Если возмущающее воздействие приравнять нулю, то получим структурную схему (рис. 3.6,а), в которой входной величиной является напряжение задания Uз, а выходной – скорость идеального холостого хода ω0зам. Свернув звенья, охваченные отрицательной обратной связью (рис. 3.6,б) и выполнив окончательные преобразования, получим структурную схему, представленную на рис. 3.6,в, из которой можно получить передаточный коэффициент системы регулирования по
управляющему воздействию:
KU = |
ω0зам = |
kрkп/ c |
= |
kрkп/ c |
(3.5) |
|
1+ kрkпkон |
1+ Kразн |
|||||
|
Uз |
|
|
|||
|
|
|
82 |
|
|
где Kразн - коэффициент разомкнутой системы с обратной связью по напряжению.
Из (3.5) можно определить скорость идеального холостого хода в замкнутой системе регулирования:
|
|
|
|
|
|
|
|
|
|
|
|
|
kрkп/ c |
|
|
|
|
|
kрkп/ c |
|
|
||||||||||
ω0зам = Uз * KU = Uз 1+ kрkпkон |
= Uз 1+ Kразн |
(3.6). |
|||||||||||||||||||||||||||||
|
|
Uз Σ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
∆u kр |
|
Uу kп |
|
Еd = E |
a |
|
|
|
ω0 |
|||||||||||||||||||
|
|
|
1 |
c |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
kон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Uз |
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
ω0 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
kрkп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1c |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
1+ kрkпkон |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Uз |
|
|
|
|
|
|
|
|
|
|
|
|
|
ω0 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
kрkп / c |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1+kрkпkон |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
в)
Рис. 3.6. Преобразования структурной схемы по управляющему воздействию
Если теперь приравнять нулю управляющее воздействие (Uз=0), то получим структурную схему относительно возмущающего воздействия по второму сумматору (рис. 3.7,а) и третьему сумматору (рис. 3.7,г). Поэтому коэффициент передачи по возмущающему воздействию складывается из двух составляющих в соответствии с рис. 3.7, в и 3.7, д:
Kf = |
Ic |
= Kf1 + Kf 2 |
= 1+ kрkпkон |
+ с |
|
|
|
∆ωзам |
|
|
Rп / c |
Ra |
(3.7) |
|
83 |
|
|
|||
|
|
|
|
|
|
|
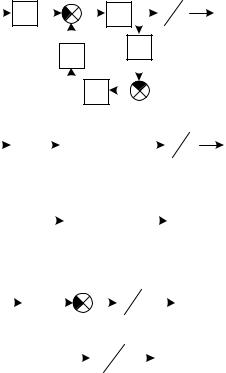
Из (3.7) получается выражение для статической просадки скорости в замкнутой системе регулирования:
∆ωзам = Ic * Kf = |
IcRп / c |
+ |
IcRa |
. |
(3.8) |
|
|||||
1+ kрkпkон |
|
||||
|
|
с |
|
||
Ic |
|
|
|
|
|
|
|
|
|
|
|
Σ2 |
|
|
|
|
|
|
|
|
|
Ud |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Rп |
|
|
|
|
|
|
1 |
|
|
1 |
c |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ed |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kон |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
kп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆u |
|
Uон |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Uу |
|
|
kр |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Σ1 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Ic |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Rп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
c |
|||||||||||
|
|
|
|
|
|
|
|
|
|
1+ kрkпkон |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
Ic |
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
∆ωзам |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rп / с |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1+kрkпkон |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Ic |
|
|
|
|
|
|
|
|
|
|
|
|
Σ3 |
|
|
|
|
|
|
|
|
|
∆ωзам |
||||||||||||
|
|
|
|
Ra |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
c |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Ic |
|
|
|
г) |
∆ω |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ra |
|
|
|
|
|
|
|
зам |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д) |
|
|
|
|
|
|
|
|
|
|
|
|
||||
∆ωзам
∆ωзам
Рис. 3.7. Преобразования структурной схемы по возмущающему воздействию
Равенство выражений (3.3) и (3.6), (3.4) и (3.8) говорит о правильности вывода данных зависимостей.
84
Если скорость идеального холостого хода умножить на c = kФн, то получим выражение для определения напряжения холостого хода ТП, а
если умножить на c = kФн выражение |
Ia Rп / c |
, то получится |
1+ kрkпkон |
уравнение для определения падения напряжения в ТП в замкнутой системе регулирования.
Поэтому, уравнение внешней характеристики ТП в замкнутой системе регулирования, в соответствии с выше сказанным, примет вид:
|
kрkп |
− |
I R |
|
Uзам = U0зам − ∆Uпзам = Uз 1+ kрkпkон |
1+ kрkпkон |
(3.9) |
||
|
|
|
a п |
|
|
|
|
|
|
где U0зам – напряжение холостого хода ТП при нулевом токе, Uпзам – падение напряжения в ТП в замкнутой системе регулирования.
Проанализируем влияние отрицательной обратной связи по напряжению на вид внешних и электромеханических характеристик электропривода.
Примем kон=0, т.е. разомкнем обратную связь. При этом для разомкнутой системы из (3.8) и (3.9) получается:
ω |
= U |
k |
k |
/ c ; |
∆ω |
раз |
= I |
(R |
п |
+R |
) / c = I |
R |
э |
/ c ; |
0раз |
з |
р |
п |
|
|
a |
|
a |
a |
|
|
|||
U0 = Uзkрkп ; |
|
|
|
∆Uп = Ia Rп . |
|
|
|
|||||||
Эти характеристики показаны на рис. 3.8, как характеристики 1 разомкнутой системы. Если подключить к входу регулятора (рис.3.1) отрицательную обратную связь по напряжению, т.е. kон≠0, то изменится значение скорости идеального холостого хода (характеристика 4а на рис. 3.3) и напряжения холостого хода ТП. Увеличением Uз на входе
регулятора можно установить ω0зам = ω0раз и U0зам = U0раз , для того,
чтобы все характеристики выходили из одной точки идеального холостого хода для удобства сравнения характеристик.
В соответствии с (3.8) и (3.9) подключение отрицательной обратной связи по напряжению ведет к уменьшению статической просадки скорости, т.е. увеличению жесткости электромеханической
85

характеристики и уменьшению падения напряжения в ТП (характеристики 2 на рис. 3.8). При настройке системы регулирования изменяемыми параметрами могут быть коэффициенты передачи (усиления) регулятора и обратной связи по напряжению. Увеличение
либо kр либо kон ведет к дальнейшему уменьшению ∆ωзам и ∆Uпзам .
При kр*kон→∞ ∆ωзам → IcRa / c , а ∆Uпзам → 0, откуда видно, что предельная внешняя характеристика ТП будет абсолютно жесткой и ей соответствует естественная электромеханическая характеристика электропривода (характеристики 3 на рис.3.8). Таким образом, диапазон электромеханических характеристик в системе с отрицательной обратной связью по напряжению лежит в пределах от разомкнутой до
естественной.
Рис. 3.8. Внешние и электромеханические характеристики в системе регулирования с отрицательной обратной связью по напряжению
Из теории автоматического регулирования известно, что система регулирования будет астатической, если в канале регулирования имеется интегральная составляющая. Следовательно, применение пропорционально – интегрального (ПИ) регулятора позволит получить жесткость естественной электромеханической характеристики при реальных значениях kр и kон.
Несколько преобразовав выражение (3.8) легко получить следующее равенство:
∆ωзам = |
1+ k |
рkпkонRa / Rэ |
, |
(3.10) |
|||
1 |
|
||||||
∆ω |
+ k |
k |
k |
он |
|
||
раз |
|
р |
п |
|
|
||
86