

на основании которого можно настроить систему регулирования для получения заданной жесткости характеристики, т.е. заданного
отношения ∆ωзам / ∆ωраз , для которого при заданном значении kон
можно рассчитать требуемое значение kр либо при заданном значении kр рассчитать требуемое значение kон.
Пример 2. Для системы регулирования с параметрами Кп = 50, Кон
= 0.016, Ra = 0.0695 Ом, Rэ = 0.133 Ом, Δωзам/Δωраз = 0.72, определить величину коэффициента усиления регулятора Кр.
На основании (3.10) составляем равенство: 0.72(1 + КрКпКон) = 1 +
КрКпКонRa/Rэ, откуда получаем (0.72 - Ra/Rэ) КрКпКон = 1 - 0.72, тогда коэффициент усиления регулятора будет равен: Кр= (1 – 0.72)/ КпКон(0.72
- Ra/Rэ) = 0.28/(50*0.016(0.72 – 0.0695/0.133)) = 0.28/(50*0.016*(0.72- 0.52) = 0.28/0.16 = 1.75.
3.3. СУЭП с отрицательной обратной связью по скорости вращения электродвигателя
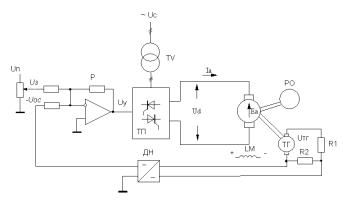
Принципиальная электрическая схема СУЭП с отрицательной обратной связью по скорости вращения электродвигателя показана на рис. 3.9.
Рис.3.9. Принципиальная электрическая схема СУЭП с отрицательной обратной связью по скорости вращения двигателя
Для реализации обратной связи по скорости вращения двигателя применяют тахогенератор ТГ, сочлененный с валом двигателя, делитель напряжения R1, R2, и датчик напряжения ДН. Датчик напряжения служит для гальванической развязки силовой цепи ТГ и цепей управления, а также для повышения помехозащищенности системы
87
регулирования, т.к. разрывается цепь прохождения помехи из силовой цепи ТГ на вход регулятора. Делитель напряжения обеспечивает максимальное падение напряжения на резисторе R2 (8÷10 В) при максимальной скорости вращения двигателя. Для масштабирования скорости вращения двигателя и напряжения обратной связи по скорости вводят коэффициент обратной связи по скорости, который определяют по выражению:
kос=Uосmax/ωmax,
где Uосmax = (8…10)В – максимальное напряжение обратной связи по скорости;
ωmax – максимальная скорость вращения двигателя, исходя из требований технологического процесса (например, скорость идеального холостого хода при номинальном напряжении).
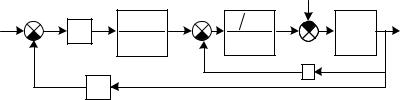
На основании принципиальной электрической схемы (рис.3.9) может быть легко составлена структурная схема СУЭП с отрицательной обратной связью по скорости двигателя, которая представлена на рис.
3.10.
|
|
Рег |
|
ТП |
|
ЯЦ |
Ic |
ЭМП |
Uз |
∆u |
kр |
Uу |
kп |
Ed |
1 Rэ |
Ia |
Rэ / с ω |
|
||||||||
|
Uос |
|
Тµр +1 |
|
Тэр +1 |
|
Тмр |
|
|
|
|
|
|
||||
|
ТГ +Дел |
|
Еа |
с |
|
|||
|
|
|
|
|||||
|
|
|
kос |
|
|
|
|
|
Рис. 3.10. Структурная схема СУЭП с отрицательной обратной связью по скорости |
||||||||
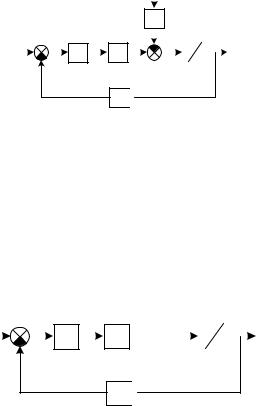
Для анализа статических характеристик СУЭП воспользуемся вырожденной структурной схемой системы регулирования, полученной из структурной схемы рис. 3.10 при p=0 и представленной на рис. 3.11.
88
|
|
|
|
|
|
|
|
|
|
|
Ic |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|||
Uз Σ1 ∆u |
|
Uу |
|
Ed |
|
|
Еа |
|
|
ω |
||||||
kр |
kп |
|
|
1 |
c |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Σ2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Uос |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
kос
Рис.3.11. Вырожденная структурная схема СУЭП с отрицательной обратной связью по скорости вращения двигателя
Из структурной схемы рис.3.11 видно, что задающим (управляющим) воздействием является напряжение задания на входе регулятора Uз, возмущающим воздействием – статический ток (момент) двигателя (нагрузка на валу).
Для определения коэффициента передачи по управляющему воздействию принимаем возмущающее воздействие равным нулю (Iс =0), тогда получается структурная схема системы регулирования по управляющему воздействию (рис. 3.12).
U |
з |
Σ1 |
∆u |
|
U |
у |
|
Ed = Ea |
|
|
ω |
||||
|
|
|
|
||||||||||||
|
|
kр |
|
kп |
|
1c |
0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Uос
kос
Рис.3.12. Вырожденная структурная схема СУЭП по управляющему воздействию
Коэффициент передачи по управляющему воздействию на основании схемы рис. 3.12 равен:
KU = |
ω0зам = |
kрkп/ c |
= |
|
kрkп/ c |
(3.11) |
|
Uз |
1+ kрkпkос / c |
|
1+ Kразс |
|
|
где Kразс - коэффициент разомкнутой системы управления с обратной связью по скорости.
89
Из (3.11) получается выражение для скорости идеального холостого хода в замкнутой СУЭП:
|
kрkп/ c |
|
kрkп/ c |
|
||
ω0зам = Uз * KU = Uз 1+ kрkпkос / c |
= Uз 1 |
+ Kразс . |
(3.12) |
|||
|
|
|
|
|
|
|
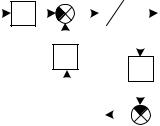
Для определения коэффициента передачи по возмущающему воздействию воспользуемся вырожденной структурной схемой системы регулирования, представленной на рис. 3.13. После преобразования данной структурной схемы получается выражение для коэффициента передачи по возмущающему воздействию:
Kf = |
∆ωзам = |
|
|
|
|
|
Rэ / c |
|
, |
||||||||||
1+ kрkпkос / c |
|||||||||||||||||||
|
|
|
Ic |
|
|
|
|
|
|||||||||||
Ic |
|
|
|
Σ2 Е |
|
|
|
|
|
∆ω |
|
||||||||
Rэ |
|
а |
|
1c |
|
||||||||||||||
|
|
k |
|
п |
Ed |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|||||
|
|
|
|
|
|
|
Uу |
|
|
Uос |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∆u |
||||||
|
|
|
|
|
|
|
|
|
kр |
Σ1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис.3.13. Вырожденная структурная схема СУЭП по возмущающему воздействию
из которого можно получить уравнение для статической просадки скорости в замкнутой системе регулирования с отрицательной обратной связью по скорости:
90
∆ωзам = Ic |
Rэ / c |
= |
|
1+ kрkпkос / c |
|||
∆ωраз |
(3.13) |
|
|
|
|
||
1+ Kразс |
|
||
Из (3.13) получается соотношение для расчета коэффициента регулятора (коэффициента обратной связи по скорости) при заданном коэффициенте обратной связи по скорости (коэффициенте регулятора) для обеспечения требуемой просадки скорости в замкнутой системе регулирования с отрицательной обратной связью по скорости двигателя:
∆ωзам |
= |
|
1 |
|
|
|
. |
(3.14) |
∆ω |
1+ k |
k |
k |
ос |
/ c |
|||
раз |
|
р |
п |
|
|
|
|
Контрольные вопросы:
1.Как получается вырожденная структурная схема СУЭП с отрицательной обратной связью по напряжению?
2.На основании вырожденной структурной схемы, получите выражение для определения скорости идеального холостого хода.
3.На основании вырожденной структурной схемы, получите выражение для определения статической просадки скорости.
4.Что определяет величина напряжения задания на входе регулятора?
5.От чего зависит, с какой скоростью будет вращаться двигатель в данной СУЭП?
6.Нарисуйте вырожденную структурную схему данной СУЭП, когда выходной координатой будет не скорость вращения двигателя, а напряжение ТП.
7.На основании вырожденной структурной схемы, получите выражение для определения напряжения холостого хода ТП в данной СУЭП
8.На основании вырожденной структурной схемы, получите выражение для определения падения напряжения в ТП для данной СУЭП
91