


10.С какой целью на входе РТ устанавливают задатчик интенсивности?
11.Какие параметры определяют темп изменения якорного тока с ЗИ на входе РТ?
12.Как правильно рассчитать постоянную интегрирования ЗИ на
входе РТ?
ГЛАВА 6. СУЭП С ОБРАТНОЙ СВЯЗЬЮ ПО ЭДС ЭЛЕКТРОДВИГАТЕЛЯ
В тех случаях, когда технически невозможно реализовать обратную связь по скорости электродвигателя (например, если электродвигатель установлен на движущемся механизме и подвод напряжения к нему осуществляется при помощи троллеев), применяют обратную связь по ЭДС электродвигателя, которая пропорциональна скорости вращения электродвигателя [9,11,14,15]. Поскольку непосредственное измерение ЭДС электродвигателя невозможно, то для выделения сигнала, пропорционального ЭДС электродвигателя, используют датчики ЭДС. Реализация датчиков ЭДС рассмотрена в приложении В.
На рис.6.1 представлена структурная схема системы ТП – Д с обратной связью по ЭДС электродвигателя, в которой датчик ЭДС (ДЭ)
представлен инерционным звеном (фильтром) с постоянной времени Tф . Коэффициент пропорциональности между напряжением обратной связи по ЭДС uоэ (напряжением задания ЭДС uзэ ) и ЭДС электродвигателя
Ea получил название коэффициент обратной связи по ЭДС, который определяется отношением:
|
|
|
|
kоэ = uоэmax |
= |
uзэmax |
|
= |
(8 −10)В |
= kос . |
(6.1) |
|||||||||||||||||||||
|
|
|
kФнωmax |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Eamax |
|
|
|
|
|
сωmax |
|
с |
|
||||||||||||||
Uу |
|
|
ТП |
Ed |
|
|
|
|
|
Ia |
|
Ic |
|
|
|
|
|
Ea |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
kп |
|
|
|
1 Rэ |
|
|
|
|
Rэ |
|
|
|
|||||||||||||||||||
|
|
|
Тµр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
||||
|
|
|
|
|
|
Ea |
|
Тэр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
uот |
|
|
|
|
|
Ia |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
kот |
|
|
|
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
uоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.6.1. Структурная схема системы ТП – Д с обратной связью по ЭДС
235
В структурной схеме на рис.6.1 можно выделить две регулируемые координаты: ток якоря Ia и ЭДС электродвигателя Ea . Следовательно,
СУЭП должна содержать два контура регулирования: внутренний контур регулирования якорного тока и внешний контур регулирования ЭДС электродвигателя.
Настройка контура регулирования якорного тока рассмотрена ранее в главе 5, поэтому рассмотрим лишь настройку контура регулирования ЭДС электродвигателя.
6.1. Настройка контура регулирования ЭДС в однократно – интегрирующей системе регулирования
Исходная структурная схема контура регулирования ЭДС электродвигателя приведена на рис.6.2,а. Поскольку передаточная
функция объекта регулирования в контуре регулирования ЭДС Wор2 ,
подлежащая компенсации настройкой регулятора ЭДС (РЭ), является инерционным звеном, то РЭ должен быть пропорциональным с
коэффициентом передачи kрэ . Необходимо определить передаточную
функцию РЭ с учетом постоянной времени Tф датчика ЭДС в цепи
обратной связи по ЭДС электродвигателя. Для этого на вход РЭ включается фильтр с постоянной времени, такой же что и у датчика ЭДС (структурная схема на рис.6.2,б). Это позволит перенести постоянную
времени Tф во внутренний контур регулирования якорного тока
(рис.6.2.,в). Тогда знаменатель передаточной функции замкнутого токового контура можно представить в следующем виде:
Q |
замт |
(p) = (T p +1)(2T p +1) |
≈ (2T |
+ T )p +1 |
= T/ |
p +1 (6.2) |
|||
|
|
ф |
µ |
µ |
ф |
µт |
|
||
где |
T/ |
= 2T |
+ T - эквивалентная |
(некомпенсируемая) постоянная |
|||||
|
|
|
µт |
µ |
ф |
|
|
|
|
времени контура тока с учетом постоянной времени ДЭ.
Для второго контура регулирования передаточная функция разомкнутого контура регулирования (с учетом постоянной времени ДЭ), настроенного на МО, на основании таблицы 1 будет равна:
W |
(p) = u |
оэ (p) |
= |
|
1 |
|
|
. |
(6.3) |
|
2T/ |
p(T |
|
p +1) |
|||||||
разэ |
u |
зэ |
(p) |
|
/ |
|
|
|||
|
|
|
|
µт |
µт |
|
|
|
||
|
236 |
|
|
|
|
|
|
|
||

Тогда для определения коэффициента передачи РЭ необходимо приравнять передаточную функцию (6.3) и передаточную функцию разомкнутого контура регулирования ЭДС (структурная схема рис.6.2,в):
|
1 |
|
|
= k |
|
1/ kот |
|
|
Rэ |
k |
|
. |
(6.4) |
|
2T/ |
p(T |
/ |
p +1) |
|
рэ T/ |
p + |
1 T p |
|
оэ |
|
|
|||
µт |
µт |
|
|
|
µт |
|
|
|
м |
|
|
|
|
|
Из равенства (6.4) определяется величина коэффициента передачи регулятора ЭДС:
k |
рэ |
= |
Tм |
|
kот |
|
= |
Tм |
|
|
kот |
|
. |
(6.5) |
||
|
|
2T/ |
|
R |
k |
оэ |
2(2T +T ) R |
k |
оэ |
|
||||||
|
|
|
µт |
|
э |
|
µ |
ф э |
|
|
||||||
Уравнение электромеханической (механической) характеристики СУЭП с обратной связью по ЭДС можно выв ести так же, как и в СУЭП с обратной связью по скорости (см. главу 5), которое примет следующий вид:
ω = |
|
u |
зэ |
|
− I |
с |
R |
э |
|
2Tµ/т |
= |
u |
зэ |
|
− ∆ω |
раз |
2(2Tµ + Tф ) |
|
|
|
|
|||||||||
kоэс |
|
|
|
Tм |
|
|
|
|
Tм |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
c |
|
|
|
|
kоэс |
, |
(6.6) |
|
||||||||||||||||
= ω0з − ∆ωсз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где ω |
= |
uзэ |
|
- |
|
скорость идеального |
холостого хода |
в |
СУЭП |
с |
||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
0з |
|
|
|
|
kоэс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
обратной связью по ЭДС, с-1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
∆ω |
|
|
|
|
= I |
|
|
Rэ |
|
= |
М |
|
Rэ |
|
статическая |
просадка |
скорости |
в |
||||||||||||
раз |
|
с с |
|
с |
с2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
разомкнутой системе регулирования, с-1; |
|
|
|
|
|
|
||||||||||||||||||||||||
∆ωсз |
|
|
|
|
|
|
|
|
2(2Tµ + Tф ) |
|
- статическая просадка скорости в |
|||||||||||||||||||
|
= ∆ωраз |
|
|
|
|
|
|
|
|
|
Tм |
|||||||||||||||||||
замкнутой системе регулирования с П – РЭ и ПИ - РТ, с-1.
237

Вид электромеханических (механических) характеристик в системе регулирования с обратной связью по ЭДС электродвигателя с учетом ограничения выходного напряжения РЭ (напряжения задания величины якорного тока) показан на рис.5.27.
|
|
|
uзэ |
|
|
|
|
|
|
|
РЭ |
|
|
|
|
|
|
ЗКТ |
|
|
Iа |
|
|
Iс |
|
|
|
|
|
|
|
Ea |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Wрэ (p) |
|
|
|
|
|
|
1 kот |
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
2Тµр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wор2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
uз |
|
|
|
Ф |
|
|
|
|
u |
|
|
|
|
|
|
РЭ |
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗКТ |
|
|
Iа |
|
|
|
Iс |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
зэ |
|
|
|
|
|
|
|
|
|
|
1 kот |
|
|
|
|
|
|
|
Rэ |
E |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
kрэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
|
|
|
Тµтр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tµт |
|
= 2Tµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
Тфр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
uзэ |
|
|
|
|
|
|
|
∆uэ |
|
РЭ |
|
|
|
|
|
|
|
ЗКТ |
|
|
Iа |
|
|
Iс |
|
|
|
Ea |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 kот |
|
|
|
|
|
|
|
|
|
|
R |
э |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
kрэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
|
|
|
/ |
|
Тµ/ тр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
= 2T +T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µт |
µ |
|
|
|
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Рис.6.2. Исходная (а) и преобразованные (б,в) структурные схемы СУЭП с обратной связью по ЭДС
238

Статическую просадку по скорости в СУЭП с обратной связью по ЭДС можно представить в следующем виде:
∆ω |
= ∆ω |
2(2Tµ + Tф ) |
= ∆ω |
раз |
( |
4Tµ |
+ |
2Tф |
) , (6.7) |
T |
|
|
|||||||
сз |
раз |
|
|
T |
T |
||||
|
|
м |
|
|
|
м |
м |
||
откуда видно, что просадка по скорости в данной системе регулирования больше, чем в СУЭП с обратной связью по скорости на
величину, определяемую отношением |
2Tф T . Следовательно, |
|
м |
жесткость механических характеристик в системе регулирования с обратной связью по ЭДС меньше, чем жесткость характеристик в системе с обратной связью по скорости.
Теоретический анализ СУЭП с обратной связью по ЭДС проводят по структурной схеме, приведенной на рис.6.2,в, поэтому передаточная функция замкнутого контура регулирования ЭДС соответствует оптимальной передаточной функции второго порядка:
Wзэ (p) = |
e(p) |
= |
|
|
|
1/ kоэ |
|
|
= |
|||
u |
зэ |
(p) |
2(2T |
+ T |
)2 p2 + 2(2T |
+ T |
)p +1 |
|||||
|
|
|
|
µ |
ф |
µ |
ф |
(6.8) |
||||
|
1/ kоэ |
|
|
|
|
|
|
|||||
= |
|
|
, |
|
|
|
|
|
||||
2T/ 2p2 |
+ 2T/ |
p +1 |
|
|
|
|
|
|||||
|
µт |
|
|
µт |
|
|
|
|
|
|
|
|
где Tµ/т = 2Tµ + Tф - эквивалентная (минимальная некомпенсируемая)
постоянная времени замкнутого контура регулирования тока в СУЭП с обратной связью по ЭДС электродвигателя.
Передаточная функция разомкнутого контура и частота среза контура регулирования ЭДС примут вид:
239
W |
(p) = uоэ (p) |
= |
|
|
1 |
|
, |
|||||||
2Т/ |
p(T/ |
p +1) |
||||||||||||
разэ |
|
|
|
u |
зэ |
(p) |
|
|
||||||
|
|
|
|
|
|
|
µт |
|
µт |
|
(6.9) |
|||
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
||
ω = |
|
= |
|
|
|
|
|
. |
|
|
||||
2T |
|
|
2(2T + T ) |
|
|
|||||||||
сэ |
|
/ |
|
|
|
|
|
|||||||
|
|
µт |
|
|
|
|
µ |
ф |
|
|
|
|
||
Как видно из (6.7) – (6.9) статические и динамические характеристики СУЭП с обратной связью по ЭДС электродвигателя
определяются постоянной времени Tµ/т = 2Tµ + Tф , т.е. зависят от
величины постоянной времени фильтра датчика ЭДС. Поэтому для получения требуемых статических и динамических свойств системы регулирования с обратной связью по ЭДС электродвигателя при реализации СУЭП необходимо определиться со структурой датчика ЭДС (приложение Г). От этого будет зависеть постоянная времени фильтра датчика ЭДС, например, при реализации инерционного ДЭ постоянная
фильтра будет равна постоянной времени якоря двигателя ( Tф = Ta ), а
при реализации быстродействующего ДЭ постоянная времени фильтра будет определяться фильтром выходного ОУ в пределах 2 … 5 мс.
Пример 17. Для параметров СУЭП, рассмотренных в примерах 5,
9, 11 (kп = 25; Тμ = 0,01с; Rэ = 0,115Ом; Тэ = 0,05с; с=кФн=3,5 Вс; Тм = 0,08с; kот= 0,0208 В/А; kос = 0,1587 Вс; Ra = 0,054 Ом; ωн =59,1с-1),
рассчитать параметры регулятора ЭДС и оценить динамические свойства контура регулирования.
Примем для обеспечения обратной связи инерционный датчик ЭДС, для которого определим постоянную времени фильтра.
|
Рассчитаем |
индуктивность |
якоря |
электродвигателя: La |
= |
|
(0,6U |
н)/(pпIн |
ωн) = (0,6*220)/(2*192*59,1) = |
0,0058 Гн. Тогда постоянная |
|||
времени ДЭ |
будет |
равна: Tф = Ta |
= La/Ra = 0,0058/0,054 = 0,11 |
с. |
||
Коэффициент обратной связи по ЭДС определяется в соответствии с
(6.1): kоэ = kос/с |
= 0,1587/3,5 = 0,0453. |
|
По (6.5) |
рассчитаем коэффициент передачи регулятора |
ЭДС: |
kрэ=(Тм*kот)/(2(2Тμ+Tф)*Rэ*kоэ) |
= |
|
(0,08*0,0208)/(2(2*0,01+0,11)*0,115*0,0453) = 1,23, при этом статическая просадка скорости (6.7) будет равна: Δωсз = Ic*Rэ*(4Tμ+2Tф)/Tм/с =
192*0,115(4*0,01+2*0,11)/0,08/3,5 = 20,5 с-1.
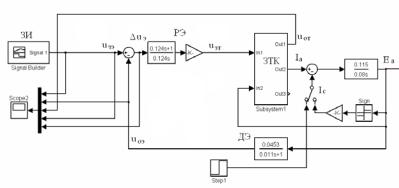
Схема модели СУЭП с инерционным датчиком ЭДС показана на рис.6.3, а результаты моделирования пуска под отсечку – на рис.6.4.
240
Рис.6.3. Схема модели СУЭП с датчиком ЭДС
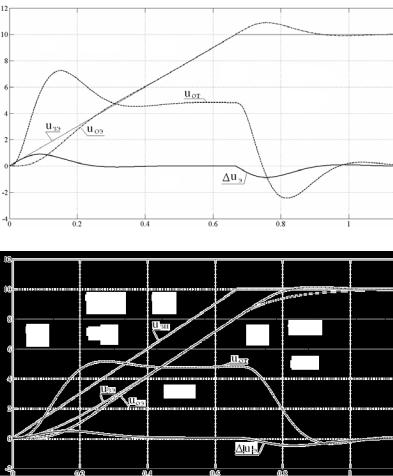
На рис.6.4 представлены переходные процессы изменения во времени напряжений: задания ЭДС uзэ ; обратной связи по ЭДС uоэ ;
обратной связи по току uот ; ошибки регулирования на входе РЭ
∆uэ = uзэ − uоэ .
Рис.6.4. Пуск под отсечку с инерционным датчиком ЭДС
241
Анализ переходных процессов пуска под отсечку (скачкообразное задание напряжения uзэ = 10 В) СУЭП с инерционным датчиком ЭДС показывает, что значительная величина постоянной времени датчика ЭДС Tф = Ta = 0,11 с привела к тому, что значение коэффициента
передачи регулятора ЭДС является недостаточным для обеспечения необходимого быстродействия и жесткости механической характеристики. Переходные процессы оказываются затянутыми во времени, измерение ЭДС электродвигателя происходит со значительным запаздыванием. Следовательно, применение датчика ЭДС с постоянной
времени Tф = Ta = 0,11 с не обеспечивает удовлетворительных статических и динамических характеристик системы регулирования.
Для повышения быстродействия системы регулирования и повышения жесткости электромеханических характеристик необходимо применить датчик ЭДС с меньшей постоянной времени. Например, у датчика ЭДС, выполненного на базе наблюдающего устройства (приложение Г), величина постоянной времени ДЭ может быть
меньше Ta . Примем ДЭ на базе наблюдающего устройства с постоянной времени Tф = Ta /10 = 0,011с.
В этом случае коэффициент передачи регулятора ЭДС примет значение:
kрэ=(Тм*kот)/(2(2Тμ+Tф)*Rэ*kоэ)=(0,08*0,0208)/(2(2*0,01+0,011)*0,115
*0,0453) = 5,15; а статическая просадка скорости составит: Δωсз = Ic*Rэ*(4Tμ+2Tф)/Tм/с = 192*0,115(4*0,01+2*0,011)/0,08/3,5 = 4,89 с-1.
Переходные процессы пуска под отсечку СУЭП с датчиком ЭДС на базе наблюдающего устройства на холостом ходу и под нагрузкой показаны на рис.6.5.
242

а)
б)
Рис.6.5. Пуск под отсечку с датчиком ЭДС на базе наблюдающего устройства на холостом ходу (а) и под нагрузкой (б)
Сравнение переходных процессов на рис.6.4 и рис.6.5 показывает, что быстродействие СУЭП с датчиком ЭДС на базе наблюдающего устройства значительно возросло, переходные процессы соответствуют настройке на МО, статическая просадка скорости уменьшилась примерно в четыре раза.
243
Из выражений (6.5) – (6.9) видно, что при Tф → 0 свойства СУЭП
с обратной связью по ЭДС приближаются к свойствам СУЭП с обратной связью по скорости электродвигателя.
6.2. Настройка контура регулирования ЭДС в двукратно – интегрирующей системе регулирования
В тех случаях, когда статическая просадка скорости по условиям технологического процесса недопустима, в СУЭП с обратной связью по ЭДС, так же как и в СУЭП с обратной связью по скорости электродвигателя, применяют настройку на симметричный оптимум. При выводе передаточной функции регулятора ЭДС для настройки на СО необходимо учитывать постоянную времени фильтра ДЭ, как это выполнялось в 6.1.
На рис.6.6,а представлена исходная структурная схема СУЭП с датчиком ЭДС в цепи обратной связи. Как и в 6.1 можно перейти к структурной схеме, в которой постоянная времени ДЭ перенесена в замкнутый контур регулирования якорного тока (рис.6.6,б).
Передаточная функция разомкнутой системы регулирования WразЭ (p) для структурной схемы рис.6.6,б равна:
W |
(p) = uоэ (p) |
= W |
(p) |
1/ kот |
|
Rэkоэ . |
(6.10) |
|||
|
||||||||||
разЭ |
u |
зэ |
(p) |
рэ |
|
T/ |
p +1 |
T p |
|
|
|
|
|
|
|
µт |
|
|
м |
|
|
Передаточная функция разомкнутой СУЭП с обратной связью по ЭДС, настроенной на СО по аналогии с (5.38) может быть представлена в следующем виде:
|
W |
(p) = |
u |
оэ |
(p) |
≈ |
4Tµ/тp +1 1 |
|
|
|
1 |
|
, (6.11) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
u |
(p) |
4T/ |
p |
|
2T/ |
p T/ |
p |
+1 |
|||||||||
|
|
разЭ |
|
|
зэ |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
µт |
|
|
µт |
|
|
µт |
|
|
|
|
где T/ |
= 2T + T |
|
- эквивалентная (некомпенсируемая) постоянная |
|||||||||||||||
µт |
µ |
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
времени контура тока в СУЭП с обратной связью по ЭДС.
Приравняв (6.10) и (6.11) можно определить передаточную функцию регулятора ЭДС при настройке на СО:
244
W |
(p) = |
4Tµ/тp +1 |
T k |
от |
|
= |
4Tµ/тp |
+1 |
k |
|
= |
4Tµ/тp +1 |
|
|||||||
|
|
|
м |
|
|
|
|
|
|
|
|
, (6.12) |
||||||||
4T/ |
p |
|
|
|
4T/ |
p |
|
T |
p |
|||||||||||
рэ |
|
2T/ |
R |
k |
оэ |
|
рэ |
|
|
|||||||||||
|
|
µт |
|
|
µт |
|
э |
|
µт |
|
|
|
|
|
рэ |
|
|
|
||
где Tрэ = 4Tµ/т / kрэ - постоянная времени интегрирования регулятора ЭДС.
Для компенсации действия форсирующего звена ( 4Tµ/тp +1) в
прямом канале регулирования на входе РЭ устанавливают дополнительный фильтр (рис.6.6,в) с передаточной функцией:
Wдф (p) = |
|
1 |
. |
(6.13) |
|
4T |
/ |
p +1 |
|||
|
µт |
|
|
|
|
Так же как и в системе регулирования с обратной связью по скорости, для формирования требуемого ускорения электропривода на входе РЭ устанавливают задатчик интенсивности, постоянную интегрирования которого определяют на основании следующего выражения:
T |
= |
U0 |
, |
(6.14) |
|
||||
ЗИ |
|
εсkоэ |
|
|
где U0 - напряжение ограничения релейного элемента ЗИ, В; ε = dω/ dt - требуемое ускорение электропривода, с-2;
с = kФн - постоянная электродвигателя, Вс.
Поскольку минимальная постоянная времени токового контура в
СУЭП с обратной связью по ЭДС T/т = 2T + Tф больше
µ µ
соответствующей постоянной времени в СУЭП с обратной связью по скорости Tµт = 2Tµ , то система регулирования с обратной связью по
ЭДС электродвигателя по быстродействию проигрывает системе регулирования с обратной связью по скорости вращения электродвигателя.
245
|
|
|
|
uзэ |
|
|
|
|
|
|
|
|
|
|
|
РЭ |
|
|
|
|
ЗКТ |
|
Iа |
Iс |
|
|
|
|
|
|
|
Ea |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Wрэ (p) |
|
|
|
|
|
1 kот |
|
|
|
|
|
Rэ |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2Тµр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
uзэ |
|
|
|
|
|
∆uэ |
|
|
|
РЭ |
|
|
|
|
|
ЗКТ |
|
Iа |
|
Iс |
|
|
|
|
|
|
|
|
Ea |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Wрэ (p) |
|
|
|
|
|
1 kот |
|
|
|
|
|
R |
э |
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тµ/ тр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T/ |
= 2T +T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µт |
|
µ |
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДЭ |
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
uз |
|
|
ДФ |
|
|
|
|
uзэ |
|
|
∆uэ |
|
|
|
РЭ |
|
|
|
|
ЗКТ |
Iа |
|
|
|
Iс |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
4T/ |
р + |
1 |
|
|
|
|
|
|
|
|
1 kот |
|
|
|
|
|
|
Rэ |
|
|
||||||||||||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µт |
|
|
|
|
kрэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
4T |
/ |
р |
+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ |
|
|
|
|
|
|
Т′µтр +1 |
|
|
|
|
|
|
|
|
|
|
|
Т |
|
р |
|
|
|||||||||||||||||
|
|
|
|
µт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Тµтр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
/ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tµт = 2Tµ +Tф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.6.6. Исходная (а) и преобразованные (б, в) структурные схемы при настройке СУЭП с датчиком ЭДС на СО
Пример 18. Для СУЭП с датчиком ЭДС на базе наблюдающего устройства и параметрами kоэ = 0,0453; kрэ = 5,15; Тф = 0,011с; Тμ = 0,01с; ТЗИ = 0,667с оценить динамические свойства системы регулирования при настройке на симметричный оптимум.
246
Исходная структурная схема для моделирования представлена на рис.6.6,а по которой составлена модель СУЭП, показанная на рис.6.7. В этой модели на входе пропорционального РЭ с коэффициентом передачи kрэ = 5,15 включено ПИ звено с передаточной функцией (4T/μтp+1)/4T/μтp = (4(2*0,01+0,011)p+1)/ 4(2*0,01+0,011)p = (0,124p+1)/ 0,124p.
Результаты моделирования переходных процессов при пуске от ЗИ на холостом ходу приведены на рис.6.8.
Рис.6.7. Схема модели двукратно – интегрирующей СУЭП с датчиком ЭДС
На рис.6.8,а показаны переходные процессы при пуске от ЗИ при отсутствии дополнительного фильтра на входе РЭ, что и вызвало повышенное перерегулирование в токе якоря. Включение дополнительного фильтра на входе РЭ снизило перерегулирование в якорном токе до нормативного значения, что и продемонстрировано на рис.6.8,б.
Динамические свойства двукратно – интегрирующей СУЭП с обратной связью по ЭДС электродвигателя (реакция на изменение задающего и возмущающего воздействий) такие же, как и в СУЭП с обратной связью по скорости (см. 5.3), с учетом того, что минимальная постоянная времени в СУЭП с обратной связью по ЭДС равна:
Tµ/т = 2Tµ + Tф .
На основании вышеизложенного можно сделать вывод о том, что статические и динамические свойства СУЭП с обратной связью по ЭДС электродвигателя определяются величиной постоянной времени датчика
ЭДС Tф . Поэтому при реализации СУЭП с обратной связью по ЭДС
247
электродвигателя, необходимо творчески подходить к реализации датчика ЭДС и в ыбирать такую схему технической реализации датчика, которая обеспечит требуемые по технологии статические и динамические показатели качества регулирования.
а)
б)
Рис.6.8. Переходные процессы пуска от ЗИ в двукратно – интегрирующей СУЭП: а)- без дополнительного фильтра на входе РЭ; б)
– с фильтром на входе РЭ
248