

Контрольные вопросы:
1.Выведите передаточную функцию замкнутого токового контура
сучетом влияния внутренней обратной связи по ЭДС двигателя.
2.Чему равна статическая ошибка регулирования тока под действием обратной связи по ЭДС?
3.Объясните физический смысл появления статической ошибки в контуре тока под действием внутренней обратной связи по ЭДС двигателя.
4.Каким образом выполняется компенсация влияния внутренней обратной связи по ЭДС двигателя на работу токового контура.
5.Как вывести передаточную функцию компенсирующего звена, если компенсирующая связь заводится на вход ТП?
6.Как вывести передаточную функцию компенсирующего звена, если компенсирующая связь заводится на вход регулятора тока?
7.Как влияет внутренняя обратная связь по ЭДС двигателя на работу контура регулирования тока?
8.Объясните физический смысл возникновения режима прерывистого тока ТП.
9.Как учитывают режим прерывистого тока при описании ТП?
10.Как изменяется передаточная функция объекта регулирования в режиме прерывистого тока?
11.Что необходимо выполнить в режиме прерывистого тока для сохранения настройки контура на модульный оптимум?
12.Что моделирует эталонная модель, чему равна передаточная функция эталонной модели? Поясните физический смысл действия эталонной модели.
13.Исходя из каких условий выбирается и чему равен коэффициент обратной связи по эталонной модели?
14.Какой эффект дает применение эталонной модели? Поясните работу эталонной модели на рис.5.19.
15.В чем заключается адаптация регулятора тока на рис.5.19?
16.Поясните работу узла адаптации регулятора тока на рис.5.19.
5.1.3.2.Двухконтурный регулятор тока
Втом случае, когда ТП изг отовлен с применением высокоточных электронных приборов (например, с цифровой СИФУ), то постоянная времени ТП относительно мала (не превышает 2…3 мс), и для повышения качества работы СУЭП электропривода в режиме
151
прерывистых токов возможно применение двухконтурного регулирования тока.
При построении СУЭП с двухконтурным регулятором тока ТП представляют безинерционным звеном с коэффициентом передачи kп .
На рис.5.21 представлена структурная схема двойного контура регулирования якорного тока.
uзт |
|
|
|
РТ 2 |
uзт1 |
|
|
|
|
РТ1 |
U |
|
ТП |
Ed |
|
|
|
|
Iа |
||||||||
у |
|
1 R |
|
|
|||||||||||||||||||||||
|
|
|
W |
(p) |
|
|
|
|
k |
рт1 |
|
k |
п |
|
э |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
рт2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тэр +1 |
|
|
||||
|
|
uот |
|
|
|
uот |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
uот |
|
|
|
|
|
Iа |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kот |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.5.21. Структурная схема двухконтурного регулирования якорного тока
Внутренний контур регулирования тока якоря включает в себя регулятор тока РТ1, ТП, якорную цепь и цепь обратной связи. При построении системы двухконтурного регулирования тока добиваются того, чтобы замкнутый внутренний контур регулирования якорного тока имел передаточную функцию инерционного звена (фильтра), реализующего предельное быстродействие из условий дискретности
ТП, поэтому |
регулятор |
РТ1 должен быть |
пропорциональным с |
|
коэффициентом передачи |
kрт1 , величину которого необходимо |
|||
определить. |
Постоянная |
времени фильтра |
T' |
для обеспечения |
|
|
|
а |
|
предельного быстродействия, исходя из условий дискретности ТП, рассчитывается по выражению:
T' = 1 |
, |
(5.21) |
а |
pfc |
|
|
|
где p - «пульсность» схемы выпрямления; fс - частота питающей сети, Гц.
152
Исходя из (5.21) постоянная времени фильтра для мостовой схемы выпрямления ( p =6) будет равна Тa/ = 3,33 мс, для двенадцатипульсной
схемы выпрямления ( p =12) - Тa/ = 1,67 мс. Постоянная времени
фильтра с предельным быстродействием будет являться минимальной постоянной времени в структурной схеме объекта регулирования, т.е. для
нашего случая Tµ = Тa/ .
Передаточная функция замкнутого внутреннего контура регулирования тока якоря имеет вид:
W |
(p) = |
I |
a |
(p) |
|
|
= |
|
|
kрт1kп |
|
= |
|||
|
|
|
|
|
|
|
|
RэTэ |
|
||||||
|
зт1 |
|
|
uзт1(p) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
(kрт1kпkот + Rэ )(kрт1kпkот + Rэ |
p +1) (5.22) |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
= |
|
|
|
kрт1kп |
|
|
|
. |
|
|
|||||
(k |
k |
k |
от |
+ R |
э |
)(T' |
p +1) |
|
|
||||||
|
|
рт1 п |
|
|
|
|
a |
|
|
|
|
|
|||
Из последнего выражения (5.22) легко можно определить передаточную функцию (коэффициент передачи) первого регулятора тока РТ1 из условия:
RэTэ |
= T' |
, |
|
||
kрт1kпkот +Rэ |
a |
|
|
|
Тогда
W |
(p) = k |
|
= |
R |
э |
(T |
−T' |
) |
|
|
||
рт1 |
|
|
э |
|
a |
|
. |
(5.23) |
||||
|
T' k |
k |
|
|
||||||||
рт1 |
|
|
|
от |
|
|
|
|||||
|
|
|
|
|
|
a |
п |
|
|
|
|
|
При такой настройке регулятора тока РТ1, передаточная функция первого замкнутого контура регулирования якорного тока может быть представлена в виде:
Wзт1(p) = |
Ia (p) |
= |
K 1/ kот |
≈ |
1/ kот |
≈ |
1/ kот |
. (5.24) |
|||||
|
|
|
K +1 |
|
(T' p +1) |
T' p +1 |
|
T p +1 |
|||||
u |
зт1 |
(p) |
|||||||||||
|
|
|
|
|
|
a |
|
a |
|
µ |
|
||
|
|
|
|
|
153 |
|
|
|
|
|
|
||
где K = kрт1kпkот / Rэ . В этом случае замкнутый внутренний
контур регулирования якорного тока представляет собой эквивалентный фильтр прямого канала регулирования (5.24) с некомпенсируемой
постоянной времени Тµ = Тa/ , которая применяется при дальнейшей реализации СУЭП.
Передаточная функция второго замкнутого контура регулирования якорного тока (рис. 5.22), в который входят регулятор тока РТ2, фильтр с
минимальной постоянной времени Т/ |
= T |
и цепь обратной связи по |
|||||||||||||||||
|
|
|
|
|
|
|
a |
µ |
|
|
|
|
|
|
|
|
|||
току с коэффициентом kот , может |
быть |
|
|
определена из условия |
|||||||||||||||
настройки контура регулирования на МО. |
|
|
|
|
|
|
|
||||||||||||
|
uзт |
|
|
|
РТ 2 |
|
|
uзт1 |
|
|
|
|
Iа |
|
|||||
|
|
|
|
|
1 kот |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Wрт2 (p) |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Тµр +1 |
|
|
|
||||
|
|
|
uот |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
kот |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.5.22. Структурная схема второго контурарегулирования якорного тока
Для выполнения этого условия необходимо, чтобы передаточная функция разомкнутого контура регулирования тока якоря (рис.5.22) была равна передаточной функции (5.8) разомкнутого первого контура регулирования, настроенного на МО, т.е. чтобы выполнялось следующее равенство:
W |
(p) |
1/ kот |
k |
|
= |
1 |
|
1 |
|
, |
рт2 |
|
Tµp +1 |
от |
|
2Tµp (Tµp |
+1) |
|
|||
из которого передаточная функция РТ2 примет вид:
154
W |
(p) = |
1 |
= |
|
1 |
. |
(5.25) |
|
|
||||||
рт2 |
|
2Tµp Tрт2p |
|
||||
|
|
|
|||||
Таким образом, второй регулятор тока получился интегральным, с |
|||||||
постоянной времени интегрирования |
Трт2 |
= 2Tµ , |
следовательно, |
||||
статическая ошибка регулирования якорного тока сводится к нулю.
В режиме прерывистых токов, когда якорный ток прерывается, внутренний токовый контур размыкается, т. к. сигнал обратной связи по току равен нулю, поэтому коэффициент интегрального регулятора РТ2
увеличивается в kрт1 раз, компенсируя изменение параметров объекта регулирования в прерывистом режиме.
Имеются и другие варианты СУЭП с двойными регуляторами, например, с внутренним контуром регулирования напряжения [6,12,13].
Пример 10. Для параметров СУЭП, рассмотренных в примерах 5 и
9 (kп = 25; Rэ = 0,115Ом; Тэ = 0,05с; Тм = 0,08с; kот= 0,0208 В/А),
рассчитать параметры двухконтурного регулятора тока, оценить динамические свойства контура регулирования.
Для мостовой схемы выпрямления минимальная постоянная времени (5.21) для двухконтурного регулятора тока берется равной Тμ=0,0033 с. На основании (5.23) рассчитывается коэффициент усиления внутреннего регулятора тока kрт1 = Rэ(Тэ-Тμ)/(Тμkпkот) = 0,115(0,05-
0,0033)/(0,0033*25*0,0208) = 3,13; постоянная времени интегрирования второго РТ равна Трт2 = 2 Тμ= 2*0,0033=0,0066 с. Схема модели двухконтурного регулирования якорного тока представлена на рис.5.23, а результаты моделирования на рис. 5.24.
155
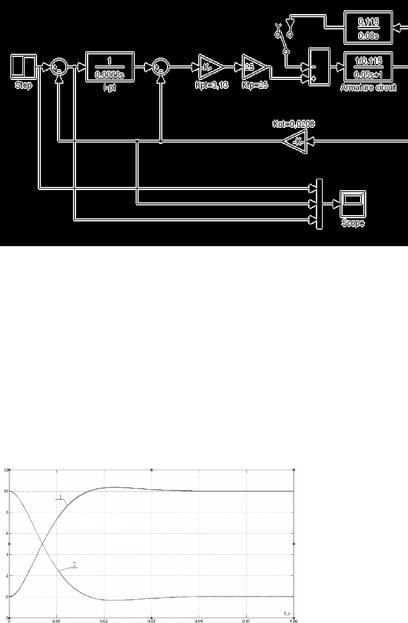
Рис.5.23. Схема модели двухконтурного регулирования якорного тока
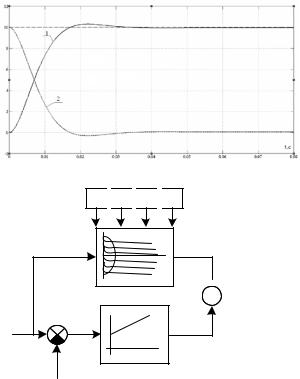
На рис.5.24,а,б представлены переходные процессы реакции контура регулирования якорного тока на скачкообразное задание
максимального тока uзтmax = 10В: изменение напряжения обратной связи по току uот =f(t) (кривая 1) и ошибки регулирования якорного тока
∆uт =f(t) (кривая 2) без учета внутренней обратной связи по ЭДС
электродвигателя (рис.5.24,а) и с учетом влияния ЭДС электродвигателя
(рис.5.24,б).
а)
156
б)
Ra
 La
La 
 Ud
Ud
 Ea
Ea
предуправление |
Uу1 |
|

 Uу
Uу
uзт |
∆uт |
Uу2 |
|
uот |
|
в)
Рис.5.24. Переходные процессы двухконтурного регулирования якорного тока (а,б) и принцип «предуправления» (в)
Переходные процессы рис.5.24,а подтверждают правильность расчета контурных регуляторов, т.к. получился оптимальный переходный процесс с нулевой статической ошибкой регулирования якорного тока.
Двойной контур регулирования якорного тока (по сравнению с ПИ регулятором тока) так же обеспечивает меньшую статическую ошибку регулирования (рис.5.24,б), вызванную действием внутренней обратной связи по ЭДС электродвигателя, что можно объяснить влиянием ЭДС электродвигателя только на внутренний контур регулирования тока, в то время, как внешний интегральный регулятор тока РТ2, не подвержен влиянию возмущающего воздействия и значительно снижает ошибку регулирования (для данного примера
∆i% <0,5%).
157