

9.От чего зависит напряжение срабатывания реле контроля скорости?
10.Какие меры принимают для выравнивания напряжения срабатывания реле контроля скорости?
11.Какие достоинства и недостатки присущи данному принципу управления?
12.Почему управление в функции скорости применяют в основном для остановки двигателя?
13.Выполните символическое описание работы схемы на рис.1.6.
14.Свяжите работу схемы рис.1.6 с характеристиками на рис.1.7.
15.Разработайте схему динамического торможения в функции скорости для асинхронного двигателя, составьте описание ее работы и представьте соответствующие механические характеристики.
1.4.1. Реле противовключения
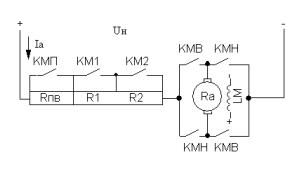
Принцип управления в функции скорости (ЭДС) используется и при обеспечении торможения противовключением в реверсивных электроприводах, где вслед за торможением происходит пуск двигателя в противоположном направлении. В этом случае якорь двигателя включается в реверсивный мост, образованный контактами контакторов направления «Вперед» (КМВ) и «Назад» (КМН), которые изменяют полярность подводимого к якорю напряжения (рис.1.8). В режиме противовключения меняется полярность приложенного к якорю двигателя напряжения, поэтому напряжение сети и ЭДС двигателя действуют согласно и ток якоря увеличивается.
Рис.1.8. Схема реверсивного электропривода с режимом торможения противовключением
29
Для ограничения тока допустимой величиной в якорную цепь кроме пускового резистора RП включают резистор противовключения RПВ, величина которого определяется выражением:
RПВ = UН I+ Emax − Rп − Ra ,
доп
где Emax – максимальная ЭДС (Emax≈ UН), В; Iдоп – допустимый ток, А;
Ra – сопротивление якорной цепи двигателя, Ом.
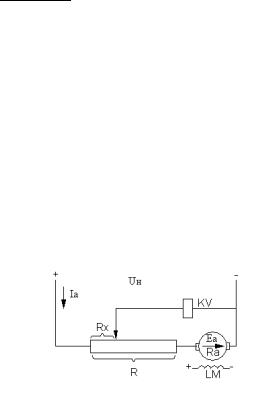
Таким образом, при пуске двигателя резистор противовключения должен быть зашунтирован, т.к. пусковой резистор ограничивает величину якорного тока на уровне допустимого, резистор противовоключения должен быть введен в якорную цепь только на время режима торможения противовключением. Управление контактором противовключения (резистором противовключения) осуществляет реле противовключения, которое подключают к якорю двигателя по схеме, изображенной на рис. 1.9.
Рис. 1.9. Схема подключения реле противовключения
Напряжение на катушке реле противовключения в соответствии со схемой (рис. 1.9) определяется зависимостью:
uKV = UН −IaRx ,
а ток двигателя в режиме противовключения равен:
30
Ia = UН +Ea = UН +kФω ,
R R
где R = R ПВ + RП + Ra, причем величиной сопротивления Ra можно пренебречь ввиду его малости по сравнению с сопротивлением
RП + RПВ, тогда RПВ = RП.
На основании вышеприведенных уравнений можно получить зависимость напряжения на катушке реле противовключения от скорости вращения двигателя:
uKV = UН −(UН +kФω)Rx / R
= UН (1−Rx / R) −kФωRx / R
Семейство характеристик uKV = f (ω) для различных точек присоединения реле KV (для разных значений Rx) приведено на рис.1.10 (штрих – пунктирные линии). При Rx = 0 uKV = UН и не зависит от
скорости вращения. При другом крайнем положении точки подключения реле KV (Rx = R) uKV = −kФω и характеристика проходит через начало
координат. Все остальные характеристики будут располагаться между этими граничными характеристиками.
31
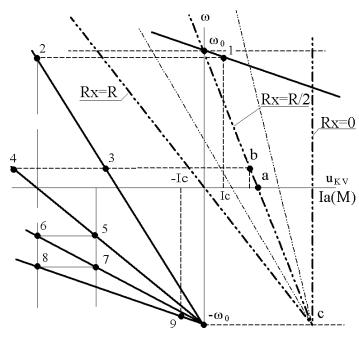
Рис. 1.10. Скоростные характеристики и зависимости uKV = f(ω) для схем рис.1.8,1.9.
Характеристики сходятся в одной точке (точке c на рис.1.10) - точке идеального холостого хода, т.к. при этой скорости напряжение и ЭДС двигателя равны, ток в цепи якоря равен нулю, и, следовательно, нет падения напряжения в сопротивлении, поэтому величина Rx не
влияет на величину напряжения на катушке KV (uKV = UН ).
Для надежной работы реле противовключения полагают, что в
начале торможения (при максимальной скорости) напряжение на катушке реле, должно быть равно нулю. Возможность отсутствия напряжения на катушке KV можно наглядно объяснить, воспользовавшись схемой замещения на рис.1.11, на котором сеть представлена в виде источника напряжения Uc.
32
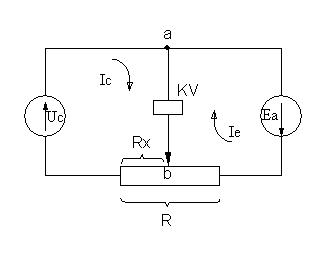
Рис. 1.11. Эквивалентная схема для режима противовключения
Катушка реле KV включена в диагональ моста ab и, следовательно, при заданных значениях напряжения сети и ЭДС двигателя всегда можно выбрать такую точку присоединения реле KV, чтобы напряжение на катушке было равно нулю (при равенстве токов Ic и Ie разность
потенциалов между точкам a и b равна нулю). |
Тогда |
uKV = UН −IдопRx = 0 , отсюда и определяется величина Rx: |
|
Rx = |
UН |
= |
|
|
UН |
|
R |
|
Iдоп |
|
UН |
+ Emax |
|
|
|
Если принять, что Emax ≈ UН, то Rx ≈ 0,5R . В этом случае при |
|||||||
неподвижном двигателе (ω = 0) |
напряжение на катушке KV будет равно |
||||||
uKVω=0 = 0,5UН (точка |
a на |
|
рис.1.10). На практике напряжение |
||||
втягивания |
реле |
KV |
uвтKV |
принимают на (10…20)% меньше |
|||
напряжения uKVω=0 , что необходимо для надежного втягивания реле при пуске двигателя с учетом возможного снижения напряжения
33
питающей сети, изменения сопротивления главной цепи из-за нагрева и конечного времени срабатывания аппаратов схемы, тогда:
uвтKV = 0,8uKVω=0 = 0,8*0,5UН = 0,4UН .
Изменение напряжения на реле противовключения при реверсе показано на рис. 1.10. В исходном состоянии двигатель работает на естественной характеристике в т. 1, определяемой величиной статического тока Ic. При изменении полярности напряжения на якоре двигателя и включенных резисторах пусковом и противовключения двигатель переходит на характеристику противовключения (т. 2 на рис. 1.10) и начинает тормозиться, при этой скорости напряжение на катушке реле противовключения KV близко к нулю и реле не втягивается. По мере снижения скорости напряжение на реле KV увеличивается и при скорости близкой к нулю (т.3 и т. b на рис. 1.10) реле втягивается, что приводит к шунтированию резистора противовключения и переходу на реостатную характеристику в т.4. Затем происходит пуск двигателя в противоположном направлении (т. 5 – т. 6 – т. 7 – т.8 – т.9 на рис. 1.10) до скорости, определяемой величиной статического тока -Ic.
Включение реле противовключения KV в схемах управления асинхронными двигателями показано на рис. 1.12. Катушка реле включена в роторную цепь АД и напряжение на ней будет определяться величиной скольжения (скорости вращения) АД:
uKV = sE2ω=0 ,
где E2ω=0 - ЭДС неподвижного ротора (при S=1), В; s - скольжение.
При неподвижном роторе напряжение на катушке реле KV меньше напряжения втягивания этого реле. В режиме противовключения (изменение чередования фаз на статоре после отключения контактора KMВ и включения контактора KMН) величина скольжения возрастает (S ≈ 2), что приводит к втягиванию реле KV и включению ступени резистора противовключения. При торможении двигателя скольжение уменьшается и при скорости двигателя близкой к нулю реле отпадает, что приводит к шунтированию резистора противовключения Rпв.
34

Рис. 1.12. Узел торможения противовключением асинхронного двигателя
В режиме торможения противовключением размыкающий контакт контактора противовключения KMП предотвращает подачу напряжения на контакторы KM1 и KM2.
Контрольные вопросы:
1.Почему в режиме противовключения дополнительно вводится резистор противовключения?
2.Как правильно рассчитать величину резистора противовключения?
3.Какие параметры определяют величину напряжения на реле противовключения?
4.Как выбирают точку подключения реле противовключения?
5.Объясните вид характеристик зависимости напряжения на реле противовключения от скорости вращения двигателя.
6.Как выбирается величина напряжения срабатывания реле противовключения?
35
7.Как изменяется напряжение срабатывания реле при изменении точки его подключения?
8.Объясните работу реле противовключения в соответствии с электромеханическими характеристиками электродвигателя.
9.Как контролируется режим противовключения у асинхронных двигателей?
1.5.Управление пуско – тормозными режимамив функции тока
(момента)
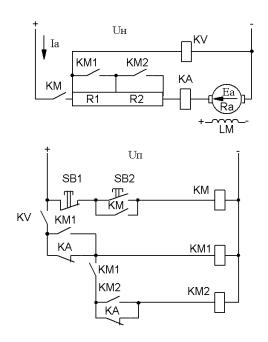
Из рис. 1.3 видно, что ток при пуске двигателя изменяется от значения I1 до I2 . Для контроля величины тока применяют, как правило, токовые реле. Схема управления пуском двигателя в функции тока представлена на рис. 1.13.
Токовое реле KA настроено таким образом, что его втягивание происходит при величине якорного тока I1, а отпад ание - при I2. При настройке схемы должны выполняться условия: время срабатывания реле KV должно быть больше времени срабатывания реле KA; время срабатывания контактора KM должно быть больше времени срабатывания реле KA.
Рис. 1.13. Схема управления пуском в функции тока
36
Если эти условия выполняются, то при нажатии на кнопку SB2 («Пуск») включается контактор KM, который подключает двигатель к сети. Происходит бросок тока и втягивание реле KA, при этом включается и реле KV, но т.к. его время срабатывания больше времени срабатывания реле KA, контакторы KM1 и KM2 питания не получают, т.к. контакт реле KA в цепи их питания разомкнут. Двигатель разгоняется по характеристике 1 (рис. 1.3). При спадании тока до величины I2, реле KA отпадает и подает питание на катушку контактора KM1, что приводит к переходу на характеристику 2, броску тока до величины I1 и срабатыванию реле KA. Питание контактора KM1 осуществляется через замкнутый контакт контактора KM1, шунтирующий контакт реле KA. Контактор KM2 не получает питания из – за разницы во времени срабатывания KM1 и KA. При снижении тока до величины I2 реле KA отпадает, что приводит к срабатыванию контактора KM2 и выходу двигателя на естественную характеристику.
К достоинствам данного способа пуска можно отнести:
-возможность осуществления пуска при максимально допустимом токе (моменте) двигателя;
-колебания напряжения сети не влияет на момент переключения;
-время пуска не зависит от температуры катушек реле.
-К недостаткам относятся:
-время пуска изменяется при изменении момента сопротивления и питающего напряжения;
-сложная настройка и изготовление токовых реле для приводов различной мощности.
Из–за перечисленных недостатков на практике данный способ управления пуском (торможением) не применяют.
Управление пуском в функции тока на практике применяют в схемах пуска двигателя до скорости выше основной ослаблением магнитного потока двигателя. Схема данного узла приведена на рис. 1.14.
После выхода на естественную характеристику (включении контактора KM2 и шунтировании резистора R2) в якорную цепь включается токовое реле KA, а в цепь обмо тки возбуждения вводится добавочный резистор Rдоб, что приводит к снижению тока возбуждения и магнитного потока. Поскольку перегрузочная способность двигателя при ослабленном магнитном потоке меньше перегрузочной способности
37