


Т. к. в режиме прерывистого тока увеличивается величина
эквивалентного |
сопротивления |
цепи выпрямления |
Rэ ≈ Rфик , |
следовательно, |
увеличивается |
и электромеханическая |
постоянная |
времени электропривода Tм' ≈ JΣRфик / c2 . Поскольку электромагнитная
постоянная времени в этом режиме Tэ = 0, то изменяется структурная
схема электродвигателя: вместо колебательного звена электродвигатель представляется инерционным звеном с возросшей постоянной времени
Tм' , что приводит к снижению быстродействия электропривода в режиме прерывистых токов.
Так как в режиме прерывистого тока величина тока якоря мала, то можно говорить о том, что сигнал обратной связи по току практически отсутствует, т.е. контур регулирования якорного тока размыкается. Это приводит к тому, что резко ухудшаются динамические свойства контура регулирования – снижается быстродействие и возрастает перерегулирование за счет запаздывания замыкания обратной связи при выходе из режима прерывистого тока.
Рассмотрим конструктивные решения, позволяющие улучшить работу контура регулирования якорного тока в режиме прерывистых токов.
5.1.3.1. Адаптивный регулятор тока с эталонной моделью
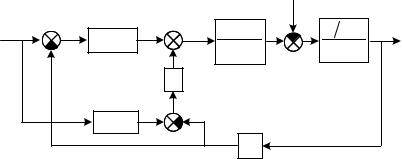
Эталонная модель – это модель замкнутого контура регулирования якорного тока, настроенного на МО. На рис. 5.18 показана структурная схема контура регулирования якорного тока, настроенного на МО, с применением эталонной модели М с передаточной функцией
Wм (p) .
Эталонная модель в точном варианте реализации имеет передаточную функцию оптимального фильтра второго порядка (см. табл.1):
Wм (p) = 2Tµ2p2 +12Tµp +1,
в упрощенном (аппроксимируемом) варианте – передаточную функцию фильтра первого порядка:
145
W (p) = |
1 |
. |
|
|
|
||
м |
2Tµp +1 |
|
|
|
|
|
|
На вход эталонной модели М (рис. 5.18) подается напряжение |
|||
задания якорного тока uзт , поэтому на выходе этало |
нной модели |
||
получается стандартный (оптимальный) переходный процесс якорного тока в масштабе сигнала обратной связи по току uм . Сигнал эталонного
(оптимального) переходного процесса uм сравнивается с фактическим
переходным |
процессом |
якорного |
тока (сигналом |
uот ) и их |
разность ∆I |
= (uм − uот ) |
(ошибка |
регулирования) с |
коэффициентом |
передачи ka добавляется к основному сигналу с выхода РТ, «подгоняя» реальный переходный процесс к оптимальному.
|
РТ |
uрт |
ТП |
Ed |
Ea |
|
Iа |
|
uзт |
Wрт (р) |
Uу kп |
|
1 Rэ |
||||
|
|
Тµр +1 |
|
|
Тэр +1 |
|
||
uот |
|
|
|
|
|
|||
|
|
kа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uзт |
М |
uм |
|
|
|
|
|
|
|
Wм (р) |
|
uот |
kот |
|
Iа |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Рис.5.18. Структурная схема контура регулирования якорного тока с эталонной моделью
Коэффициент передачи ka выбирается из условия обеспечения
устойчивой работы контура регулирования (для исключения автоколебаний) по формуле [12,13]:
k |
a |
≤ |
TэRэ |
( |
p |
Sin |
π(1+ ω2 |
T2 ) −1), |
|
|
|||||||||
|
|
2Tµkпkот |
|
π |
р |
гр |
µ |
||
|
|
|
|
|
|
||||
|
|
|
|
146 |
|
|
|
||
где ωгр = ω0p/2 – граничная частота, определяемая частотой питающей сети и «пульсностью» р схемы выпрямления (для трехфазной мостовой схемы выпрямления ωгр = 942 с-1).
Коэффициент ka уточняется при наладке и моделировании электропривода (обычно ka ≤ 25).
Применение эталонной модели позволяет:
•при неточной настройке параметров СУЭП или нестабильности параметров СУЭП и объекта регулирования получить свойства контура регулирования тока, близкие к стандартным (оптимальным);
•несколько улучшить свойства токового контура в зоне режима прерывистых токов;
•снизить влияние внутренней обратной связи по ЭДС двигателя на свойства СУЭП.
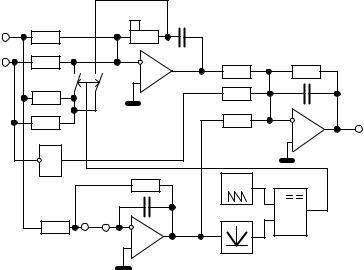
Принципиальная электрическая схема адаптивного регулятора тока с эталонной моделью представлена на рис.5.19 с полярностью входных и выходных напряжений для условного направления работы электропривода «Вперед» [13].
147
+uзт |
R1 |
|
R3 |
C1 |
|
|
|
−uот |
R1 |
|
|
−uрт |
R6 |
|
R9 |
|
|
|
|
|
|
||
|
R2 |
|
Kл |
+uот |
R7 |
|
C3 |
|
R2 |
|
DA1 |
−uм |
R8 |
|
|
|
|
|
|
+ Uу |
|||
|
−1 |
|
|
|
|
|
DA 4 |
|
|
R5 |
|
|
|
|
|
|
DA 2 |
|
G |
uG |
|
|
|
|
R4 |
1 |
C2 |
СВМ |
K |
F |
|
|
2 |
|
|||||
|
|
|
|
−uм |
|
|
|
|
|
|
DA 3 |
|
| uм | |
|
|
|
|
|
|
|
|
|
|
Рис.5.19. Принципиальная электрическая схема адаптивного |
|||||||
|
регулятора тока с эталонной моделью |
|
|
||||
На операционном усилителе DA1 реализован регулятор тока, на входы которого подаются напряжения задания величины якорного тока
uзт и обратной связи uот по току якоря. Адаптация регулятора тока
заключается в изменении его структуры с пропорционально – интегральной в непрерывном режиме на интегральную в режиме прерывистого тока с изменяющейся постоянной времени интегрирования
взависимости от длительности протекания якорного тока λ . Изменение
вструктуре регулятора происходят при замыкании ключа Кл.
Операционный усилитель DA2 – инвертор, изменяющий полярность напряжения uот .
В схеме предусмотрено применение эталонной модели, реализованной на DA3 в упрощенном варианте. Если необходимо применение эталонной модели, то в этом случае устанавливается перемычка 1-2 на входе DA3, и на выходе DA3 получается
смоделированный оптимальный переходный процесс uм . На усилителе
148
DA4 реализован сумматор с небольшим фильтром, на выходе которого формируется напряжение управления ТП определяемое выражением:
Uу = (uрт R9 + (uм R9 − uот R9 )) /(R9C3p +1)
R6 R8 R7
Если перемычка 1-2 не установлена, то в этом случае эталонная модель не используется и на выход DA3 (на вход схемы выделения
модуля СВМ) через резисторы R4 и R5 проходит напряжение uзт .
Узел адаптации РТ в режиме прерывистого тока включает в себя компаратор К, генератор пилообразного напряжения G и схему выделения модуля сигнала СВМ. СВМ обеспечивает неизменность полярности напряжения на входе компаратора при изменении направления протекания якорного тока. Диаграммы напряжений, поясняющие работу узла адаптации, показаны на рис. 5.20.
Генератор пилообразного напряжения формирует на выходе напряжение uG , амплитуда которого настраивается равной величине гранично – непрерывного тока якоря в масштабе напряжения обратной связи по току ( kотIdгр ), а ч астота напряжения uG определяется
«пульсностью» схемы выпрямления и частотой питающей сети fG = pfc .
Напряжение uG на компараторе К сравнивается с модулем сигнала выходного напряжения модели, т.е. со средним значением тока якоря в
масштабе напряжения обратной связи по току | uм |= kотId . Если ТП |
|
работает в режиме |
непрерывного тока ( Id ≥ Idгр ), то в этом случае |
| uм1 |≥ uгр (рис.5.20) |
сравнения напряжений uG и uм не происходит, |
поэтому компаратор не изменяет своего состояния (логический выходной сигнал компаратора F = 0 ), следовательно, и ключ Кл, управляемый сигналом F находится в разомкнутом состоянии, что соответствует ПИ
регулятору тока с постоянной интегрирования |
Tрт |
= R1C1 и |
коэффициентом усиления kрт = R3 / R1 . При работе |
ТП в |
режиме |
прерывистого тока ( Id < Idгр ) напряжение | uм1 |< uгр (рис.5.20). |
|
|
149 |
|
|

uм ,uG |
|
| uм1 |
|> uгр |
||
|
|
|
|||
uгр |
|
|
| uм2 |= uгр |
||
| uм3 |
|< uгр |
| uм4 |
|<| uм3 | |
||
|
|||||
|
|
|
|
t |
|
F |
|
|
|
t |
|
|
|
|
|
||
F |
|
|
|
t |
|
|
|
|
|
||
Рис. 5.20. К пояснению работы узла адаптации регулятора тока |
|||||
В этом случае происходит сравнение напряжений uG и uм , что
приводит к изменению логического сигнала F > 0 и изменению состояния ключа Кл. При замыкании ключа Кл регулятор тока
становится интегральным (шунтируется резистор R3 в цепи обратной связи DA1), параллельно входным резисторам R1 подключаются резисторы R2 , что приводит к уменьшению постоянной времени интегрирования регулятора Tрт' = R1R2C1 /(R1 +R2 ) .
Чем глубже заходит ТП в режим прерывистого тока, тем меньше
величина λ, |
тем дольше ключ Кл находится в замкнутом состоянии |
(диаграмма |
рис.5.20 для | uм4 |<| uм3 | ), тем меньше величина |
постоянной времени интегрирования РТ. Таким образом, определенной величине λ в режиме прерывистого тока ставится в соответствие
необходимая величина постоянной времени интегрирования РТ Tрт' .
150