


СУЭП с обратной связью по ЭДС электродвигателя (без датчика скорости), как один из программируемых вариантов, заложена во всех современных электроприводах с микропроцессорным управлением.
Контрольные вопросы:
1.В каких случаях применяют СУЭП с обратной связью по ЭДС электродвигателя?
2.Как правильно рассчитать величину коэффициента обратной связи по ЭДС?
3.Выведите коэффициент усиления регулятора ЭДС.
4.Выведите уравнение электромеханической характеристики в СУЭП с обратной связью по ЭДС электродвигателя и проанализируйте его составляющие.
5. Как влияет на жесткость механических |
характеристик |
постоянная времени датчика ЭДС в однократной СУЭП? |
|
6.Как влияет на быстродействие однократной СУЭП постоянная времени датчика ЭДС?
7.В чем отличие настройки регулятора ЭДС от регулятора скорости в двукратной СУЭП?
8.Как правильно рассчитать постоянную времени фильтра на входе регулятора ЭДС в двукратной СУЭП?
9.Как рассчитать постоянную времени задатчика интенсивности в СУЭП с обратной связью по ЭДС?
10.Поясните переходные процессы на рис.6.8, объясните, в чем их
отличие.
ГЛАВА 7. СУЭП В ДВУХЗОННОЙ СИСТЕМЕ РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ
Регулирование скорости электродвигателя изменением величины магнитного потока применяется в основном в системах двухзонного регулирования. В системах двухзонного регулирования в первой зоне (от нуля до номинальной скорости) регулирование скорости осуществляется изменением подводимого к якорю двигателя напряжения при постоянном номинальном магнитном потоке; во второй зоне (скорость выше номинальной) регулирование скорости осуществляется ослаблением магнитного потока при неизменном номинальном напряжении на якоре электродвигателя (или постоянстве ЭДС электродвигателя) [2,3,7,11].
Возможности электродвигателя, работающего в системе двухзонного регулирования, могут быть охарактеризованы графиками рис.7.1, где по оси абсцисс отложены значения скорости, а по оси
249
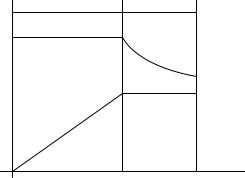
ординат – предельные значения длительно допустимых тока якоря, момента и мощности электродвигателя.
Iдоп = Iн |
|
|
Мдоп = kФIн |
|
|
P = Мω |
|
|
ωн |
ωmax |
ω |
Рис.7.1. Характеристики двухзонного регулирования |
||
При обеспечении требуемого режима охлаждения во всем диапазоне длительно допустимым для электродвигателя значением тока якоря является его номинальный ток. Поскольку на всех скоростях до основной магнитный поток остается номинальным, то допустимое
значение момента также |
остается равным |
номинальному |
значению M = kФнIн = const . |
На скоростях |
выше основной |
допустимое значение момента уменьшается в соответствии с выражением M = P / ω, а допустимая мощность остается постоянной Р ≈ Ua Iн = const . Таким образом, применение двухзонного
регулирования целесообразно в тех случаях, когда момент нагрузки механизма на верхних скоростях меньше, чем на скоростях ниже основной. В этом случае установленная мощность электродвигателя получается меньше, чем при обеспечении всего диапазона за счет изменения напряжения при постоянном потоке.
На рис.7.2 показана силовая схема системы двухзонного регулирования скорости электродвигателя. В якорной цепи включен реверсивный ТП для регулирования скорости электродвигателя изменением подводимого к якорю напряжения.
250
Рис.7.2. Принципиальная электрическая схема системы двухзонного регулирования
Обмотка возбуждения получает питание от нереверсивного тиристорного возбудителя ТВ, который выбирается с учетом обеспечения необходимой форсировки. Сформированы обратные связи по напряжению, току якоря, току возбуждения и скорости вращения электродвигателя.
На рис. 7.3 представлена исходная структурная схема электродвигателя постоянного тока в системе двухзонного регулирования, соответствующая принципиальной электрической схеме на рис.7.2.
251
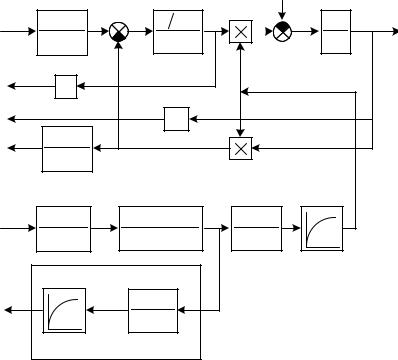
Как видно из структурной схемы рис.7.3 СУЭП в дву |
хзонной |
системе регулирования скорости вращения электропривода |
должна |
состоять из двух взаимосвязанных систем регулирования: |
|
-системы регулирования скорости изменением подводимого к электродвигателю напряжения;
-системы регулирования скорости изменением магнитного
потока.
Взаимосвязь между двумя системами регулирования осуществляется через ЭДС электродвигателя, которая поддерживается
во второй зоне регулирования на уровне Ea = k ω = Eaн = constФ . Для
выделения сигнала, пропорционального ЭДС электродвигателя, применяют датчик ЭДС (ДЭ), реализация которого рассмотрена в приложении В.
U |
|
ТП |
Ed |
|
|
Ia |
|
Мc |
|
|||
у |
kп |
|
1 Rэ |
М |
1 |
ω |
||||||
|
|
|
|
|
|
|||||||
|
|
|
Тµр +1 |
|
|
Ea |
Тэр +1 |
|
|
JΣp |
|
|
uот |
ДТ, Ш |
I |
a |
|
|
kФ |
|
|
||||
|
|
|
kот |
|
|
|
|
|
|
|||
uос |
|
|
ТГ, Дел. ω |
|
|
|
|
|||||
uоэ |
kоэ |
ДЭ |
Ea |
кос |
|
ω |
|
|
||||
|
|
|
|
|||||||||
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
||
U |
|
|
ТВ |
|
Edв |
|
|
Iв |
|
|
|
|
ув |
k |
в |
|
Т |
р +1 |
1 |
|
kФ |
||||
|
|
|
|
к |
|
|
|
|
||||
|
|
|
Тµвр +1 |
|
|
Rв (ТвΣр +1) |
|
Ткр +1 |
|
|
||
uоф |
ФП |
Uотв |
ДТВ , Ш |
|
|
|
|
|||||
|
|
kотв |
|
|
|
|
||||||
|
|
|
|
|
|
|
Ткр +1 |
|
|
|
|
|
|
|
|
ДМП |
|
|
|
|
|
|
|
|
|
Рис.7.3. Исходная структурная схема объекта регулирования для двухзонной системы регулирования
252