

При этом коэффициент передачи регулятора положения при отработке средних перемещений будет определяться зависимостью:
|
|
= kосω = k |
|
|
|
|
|
k |
|
|
2εдоп |
. , |
(8.10) |
||
|
|
|
|||||
|
рпс |
∆uп |
ос kмkоп∆uп |
|
|||
а выходное напряжение РП должно изменяться по зависимости:
uвыхРП = kосω = kос |
|
2εдоп∆uп |
|
. |
(8.11) |
|
|||||
|
|
kмkоп |
|
||
Как видно из (8.10), коэффициент передачи РП при отработке средних перемещений должен изменяться в соответствии с изменением
позиционного рассогласования ∆uп .
8.2 Настройка нелинейного регулятора положения
Рассмотрим изменение коэффициента передачи РП и выходного напряжения РП в зависимости от изменения позиционного
рассогласования ∆uп . Как видно из (8.10) и (8.11) коэффициент передачи РП при изменении ∆uп должен изменяться по
гиперболической зависимости kрп = k
 1/ ∆uп , а выходное напряжение РП (напряжение задания скорости вращения электропривода) должно изменяться по параболической зависимости uвыхРП = uзс = k
1/ ∆uп , а выходное напряжение РП (напряжение задания скорости вращения электропривода) должно изменяться по параболической зависимости uвыхРП = uзс = k
 ∆uп . На рис.8.4. показаны зависимости kрп = f (∆uп ) и uвыхРП = f(∆uп ) .
∆uп . На рис.8.4. показаны зависимости kрп = f (∆uп ) и uвыхРП = f(∆uп ) .
290
kрп , uвыхРП
2 |
uвыхРП = uзс |
b |
uзс = kос ωн |
||
kрпм ∆uп |
|
c |
|||
|
|
|
|||
|
|
|
|
||
d 1
kрпм
|
a |
kрп |
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
∆uпa |
∆uпb |
∆uп = uзп |
||
|
|
|
|
||
Рис.8.4. Зависимости коэффициента передачи и выходного напряжения РП от позиционного рассогласования
Из рис.8.4 видно, что при ∆uп стремящемся к нулю (отработка
заданного перемещения), коэффициент передачи регулятора положения стремится к бесконечности. Однако, при отработке малых перемещений, коэффициент передачи РП для обеспечения отсутствия перерегулирования и устойчивой работы системы регулирования должен
быть ограничен величиной kрпм (т. d на рис.8.4). Следовательно, в диапазоне значений 0 < ∆uп ≤ uпa коэффициент передачи РП должен быть равен kрп = kрпм = const. Известно, что выходное напряжение РП
не должно превышать задания номинальной скорости вращения электродвигателя, поэтому его следует ограничить на уровне
uвыхmaxРП = kocωн при позиционном рассогласовании ∆uп ≥ uпb (т.b на рис.8.4). Таким образом, для того чтобы система регулирования отрабатывала малые, средние и большие перемещения за минимальное время с оптимальными переходными процессами параболическая характеристика РП должна быть скорректирована в зоне малых и больших перемещений.
291

В зоне малых перемещений ( 0 < ∆uп ≤ uпa ) характеристика РП должна быть прямолинейной с коэффициентом передачи kрпм
uвыхРП = kрпм∆uп (прямая 2 на рис.8.4) , в зоне средних перемещений ( uпa ≤ ∆uп ≤ uпb ) характеристика РП должна быть параболической
(кривая 1 на рис.8.4), в зоне больших перемещений ( ∆uп ≥ uпb )
характеристика РП должна быть ограничена на уровне задания номинальной скорости вращения (прямая bc на рис.8.4).
Из равенства kрпм∆uпa = kос |
|
2εдоп∆uпa |
|
можно определить |
kмkоп |
|
|||
|
|
|
|
величину позиционного рассогласования ∆uпa , определяющую границу отработки малых перемещений:
|
|
|
k |
|
2 |
2ε |
|
|
|
2ε |
доп |
k |
м |
k |
оп |
|
|
|||
∆u |
|
= |
|
|
ос |
|
|
|
|
доп |
= |
|
|
|
, |
(8.12) |
||||
|
пa |
k |
|
|
|
k |
м |
k |
оп |
|
|
ω |
|
|
|
|
|
|||
|
|
|
|
рпм |
|
|
|
|
|
|
сп |
|
|
|
|
|||||
где ωсп - частота среза контура регулирования перемещения.
Величина |
позиционного |
|
рассогласования ∆uпb , |
определяющая |
|||||||||
границу отработки больших перемещений, определяется из равенства |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
ос |
ω = k |
ос |
2εдоп∆uпb |
|
, откуда |
|
|
|
|
|
||
|
|
|
|
|
|
||||||||
|
н |
kмkоп |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∆uпb = |
ω2k |
м |
k |
оп |
|
|
||
|
|
|
|
|
н |
|
. |
(8.13) |
|||||
|
|
|
|
|
2εдоп |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Характеристика нелинейного РП строится в первом и третьем квадрантах для обеспечения отработки заданных перемещений в противоположных направлениях.
Контрольные вопросы:
1. Какой электропривод называют позиционным?
292
2.Как выполняют обратную связь по положению рабочего органа механизма?
3.В чем отличие системы регулирования перемещения от системы регулирования положения?
4.Поясните структурную схему позиционного электропривода.
5.Как рассчитать коэффициент обратной связи по положению (перемещению)?
6.Как рассчитать передаточное отношение измерительного редуктора?
7.Какие основные требования предъявляют к позиционным
СУЭП?
8.Назовите основные режимы позиционной системы регулирования.
9.Как настраивается регулятор положения при отработке малых перемещений?
10.Как правильно рассчитать коэффициент передачи регулятора положения при отработке больших перемещений?
11.Как отразится на работе СУЭП отклонение коэффициента регулятора положения от рассчитанного по (8.8)?
12.Как настроить регулятор положения при отработке средних перемещений?
13.Почему регулятор положения выполняют нелинейным?
14.Как правильно рассчитать характеристику нелинейного регулятора положения?
15.Как должно изменяться выходное напряжение регулятора положения в зависимости от рассогласования?
8.3 Влияние нагрузки на работу позиционной системы
Физическая природа возникновения ошибки, вызванной действием статического момента на валу электродвигателя, обусловлена тем, что при нагрузке электродвигателя и установившемся режиме работы, например, при скорости, равной нулю, для обеспечения вращения электропривода необходимо к якорю электродвигателя приложить напряжение, равное падению напряжения в якорной цепи, вызванное током, необходимым для преодоления момента нагрузки. Таким образом, ТП должен увеличить свою ЭДС, т.е. должен увеличиться сигнал ошибки между заданным и действительным положением рабочего органа механизма. После окончания процесса отработки заданного положения рабочий орган механизма не попадает в требуемую точку, т.к.
293
электродвигатель остановится не при нулевом значении ЭДС преобразователя, а при его значении, равном Ed = IcRэ , когда момент
электродвигателя и момент сопротивления на валу электродвигателя уравновесят друг друга. Следовательно, появляется ошибка при отработке заданного положения. Электродвигатель будет находиться в неподвижном состоянии, а по якорной цепи будет протекать ток, равный по величине статическому току.
Поскольку в установившемся режиме при остановке электродвигателя его скорость равна нулю, а по цепи якоря протекает ток, то в этом случае напряжение на выходе РП будет равно:
uвыхРП |
= ∆uпсkрпм = uзс = |
uзт |
= |
Ickот |
, |
(8.14) |
|
|
|||||
|
|
kрс |
kрс |
|
||
где ∆uпс - ошибка на |
входе РП, вызванная |
наличием |
момента |
|||
сопротивления на валу электродвигателя.
Ошибка при отработке заданного положения (перемещения) на входе РП, вызванная наличием момента нагрузки на валу электродвигателя, определяется зависимостью
∆uпс = ∆Sсkоп = ∆ϕсkоп , где ∆Sc (∆ϕс ) - расстояние (угол поворота), которое не «доехал» рабочий механизм из – за наличия момента сопротивления на валу электродвигателя.
Тогда из (8.14) можно получить зависимость ошибки регулирования ∆Sc (∆ϕс ) в зависимости от величины нагрузки на валу:
∆S (∆ϕ |
) = |
|
|
I |
k |
|
|
|
|
= I |
|
|
4TµRэkос |
|
|
k |
от |
= |
|||||||||||||
|
|
|
|
c |
|
от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
с |
|
с |
|
|
k |
рс |
k |
рпм |
k |
оп |
c |
T |
сk |
от |
|
k |
оп |
k |
рпм |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
(8.15) |
|||||||||
|
R |
|
4Tµ |
|
|
k |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
||||
= I |
э |
|
|
ос |
|
|
= ∆ω |
|
|
|
ос |
|
|
|
|
|
|
|
|
|
|||||||||||
|
c с |
|
T |
|
k |
оп |
k |
рпм |
|
|
|
с |
|
k |
оп |
k |
рпм |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Из (8.15) видно, что величина ошибки, вызванная наличием момента нагрузки на валу электродвигателя, определяется величиной
статической ошибки контура регулирования скорости ∆ωс . Поэтому,
294
чтобы исключить ошибку, вызванную действием статического момента, необходимо применить ПИ регулятор скорости, в этом случае ∆ωс = 0,
а, следовательно, и ∆Sc (∆ϕс ) = 0.
Кроме того, ошибка снижается с ростом коэффициента усиления РП kрпм , однако его значение не должно превышать величины, рассчитанной по (8.4) или (8.5).
Для электроприводов, отрабатывающих заданное перемещение под нагрузкой и имеющих ошибку при отработке заданного перемещения
∆Sc (∆ϕс ) , необходимо обеспечить зону нечувствительности в
характеристике РП для предотвращения протекания тока по неподвижному якорю после отработки заданного перемещения. В момент трогания электропривода величина напряжения с выхода РП должна
превысить начальное значение uРП0 , которое определяется величиной момента нагрузки, т.е. величиной статического тока:
uРП0 |
= |
uзт |
= |
Ickот |
, |
(8.16) |
kрс |
|
|||||
|
|
|
kрс |
|
||
при этом величина ошибки на входе РП будет равна:
|
∆uп0 |
= uРП0 = |
Ickот |
. |
|
|
(8.17) |
|
|
|
|
||||
|
|
kрпм |
kрсkрпм |
|
|
|
|
Начальный |
участок |
характеристики |
РП |
с |
зоной |
||
нечувствительности, показан на рис. 8.5.
295
|
|
|
|
uвыхРП = uзс |
||
|
|
|
|
kрпм ∆uп |
||
−∆u |
|
uРП0 |
|
∆uп |
||
|
||||||
−∆u |
п0 |
|
||||
|
пa |
|
|
|
||
|
|
|
|
∆uп0 ∆uпa |
||
|
|
|
|
−uРП0 |
||
|
|
|
|
|||
|
|
|
|
|
|
|
Рис.8.5. Характеристика РП с зоной нечувствительности
В диапазоне изменения позиционного рассогласования
− ∆uп0 ≤ ∆uпс ≤ ∆uп0
выходное напряжение РП остается равным нулю, что предотвращает работу неподвижного электродвигателя под током. Максимальная ошибка отработки заданного перемещения должна
удовлетворять следующему требованию: ∆Scmax ≤ 2∆uп0 .
kоп
В позиционных электроприводах, работающих с переменным моментом нагрузки, зона нечувствительности рассчитывается для максимального значения момента нагрузки.
Пример 21. Для параметров СУЭП, рассмотренных в примере 20 реализовать нелинейный регулятор положения. Выполнить моделирование работы позиционной СУЭП при отработке заданных перемещений.
Для построения характеристики РП определим точки сопряжения характеристики РП на основании уравнений (8.12) и
(8.13):
uпa=(kос/kрпм)2*2ε/(kм*kоп)=(0,1587/7)22*94,5/(0,015*10)=0,63
В;
uпb=(ωн2*kм*kоп)/2ε= (59,12*0,015*10)/2*94,5 = 3,2 В.
296
Параболическая характеристика РП определяется зависимостью (8.11):
uвыхРП=kос√(2ε/(kмkоп))√(Δuп)=0,1587√(2*94,5/(0,015*10))√(Δuп
)=
=5,63√(Δuп).
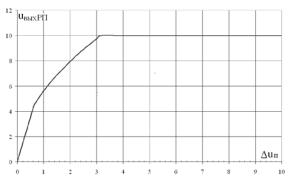
Результаты расчета нелинейной характеристики РП представлены в таблице 3, а сама характеристика РП приведена на рис.8.6.
Таблица 3. Нелинейная характеристика РП uвыхРП=f(Δuп)
uп, В |
|
,63 |
,8 |
,0 |
,2 |
,5 |
,0 |
,55 |
0 |
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
выхРП, В |
|
,48 |
,03 |
,63 |
,17 |
,89 |
,96 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
Рис.8.6. Нелинейная характеристика РП
Как видно из характеристики рис.8.6 она состоит из линейного участка, параболического и участка ограничения выходного напряжения, что позволяет отрабатывать все возможные перемещения.
Для моделирования позиционной СУЭП необходимо к модели однократной системы регулирования скорости добавить контур регулирования положения, в который входят регулятор положения с нелинейной характеристикой, рассчитанной ранее, объект регулирования и обратная связь по положению. Схема модели позиционной СУЭП представлена на рис. 8.7.
297
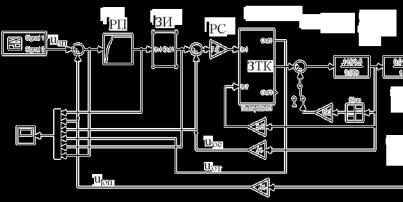
Рис.8.7. Модель позиционной СУЭП
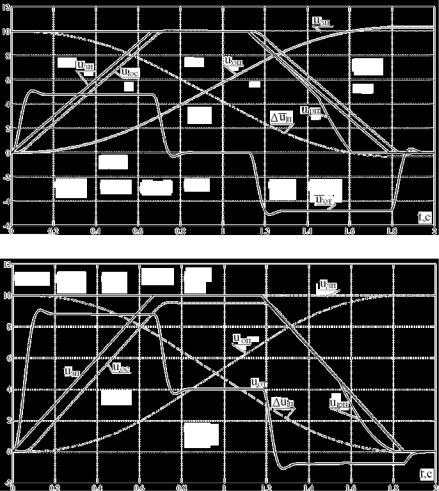
Результаты моделирования работы позиционной СУЭП при отработке различных перемещений приведены на рис.8.8…8.10, на которых показаны изменения во времени выходного напряжения РП uРП, напряжение задания перемещения uзп; напряжение на выходе ЗИ uзи; напряжения обратной связи по положению uоп; скорости uос и току uот; и ошибка на входе РП uп.
Рассмотрим работу позиционной СУЭП при отработке максимального перемещения uзпmax =10В на холостом ходу (рис.8.8,а) и
под нагрузкой (рис.8.8,б). В характеристике РП предусмотрена зона нечувствительности для предотвращения протекания тока по неподвижному электродвигателю.
В начале работы РП заходит в ограничение и на его выходе формируется максимальное задание скорости uзсmax , задатчик интенсивности формирует линейно изменяющееся напряжение с заданным темпом uзи , которое поступает на вход РС, обеспечивая разгон
электропривода с заданным динамическим током, т.е. с заданным ускорением.
298
а)
б)
Рис.8.8. Отработка больших перемещений на холостом ходу (а) и под нагрузкой (б)
Электропривод работает на максимальной установившейся скорости до тех пор, пока РП не выходит из ограничения; после чего выходное напряжение РП начинает уменьшаться в соответствии с
299
зависимостью (8.11), что приводит к торможению электропривода с заданным ускорением.
На холостом ходу (рис.8.8,а) электродвигатель работает с максимальной скоростью вращения, а т.к. пройденный путь определяется интегралом от скорости вращения, т.е. площадью, заключенной между осью времени и скоростью (напряжением обратной связи по скорости), то отработка максимального перемещения на холостом ходу сопровождается перерегулированием.
Работа под нагрузкой (рис.8.8,б) происходит на скорости меньше максимальной, увеличивается время работы на установившейся скорости, остановка происходит с заданным ускорением. Поскольку электродвигатель вращается с меньшей, чем максимальная, скоростью, то отработка заданного перемещения происходит без перерегулирования.
На рис.8.9 представлены переходные процессы позиционной СУЭП при отработке средних перемещений uзп = 3В на холостом ходу (рис.8.9,а) и под нагрузкой (рис.8.9,б).
При отработке средних перемещений РП не заходит в область ограничения, т.е. регулятор начинает работать на параболическом участке характеристики. Выходное напряжение РП снижается по зависимости (8.11), при этом ЗИ отрабатывает разгон электропривода с заданным ускорением, т.к. на входе ЗИ напряжение с выхода РП больше напряжения с выхода ЗИ. Как только напряжение с выхода РП становится равным напряжению с выхода ЗИ, выходное напряжение ЗИ начинает снижаться под действием снижающегося выходного напряжения РП. Выходное напряжение РП снижается в соответствии с (8.11), формируя заданное ускорение при торможении электропривода.
Отработка средних перемещений происходит по треугольной тахограмме, электропривод работает с заданным ускорением при разгоне и торможении, формируемым задатчиком интенсивности на входе РС. Отработка средних перемещений, так же, как и больших, сопровождается перерегулированием на холостом ходу и отсутствием перерегулирования при работе под нагрузкой.
Поскольку позиционный электропривод в большинстве случаев работает, как правило, под нагрузкой, то настройку СУЭП, отрабатывающую заданное перемещение под нагрузкой без перерегулирования, можно считать правильной.
На рис. 8.10 показаны переходные процессы работы позиционной СУЭП при отработке малых перемещений uзп = 0,1 В.
300
а)
б)
Рис.8.9. Отработка средних перемещений на холостом ходу (а) и под нагрузкой (б)
Из переходных процессов рис.8.10 видно, что отработка малых перемещений происходит в условиях, когда ни ток, ни скорость, не достигают установившегося значения. Отработка осуществляется при
301

ускорении меньше заданного. Задатчик интенсивности работает в режиме слежения.
Как видно из переходных процессов рис.8.8…8.10 спроектированная система управления позиционным электроприводом обеспечивает отработку средних и больших перемещений с заданным ускорением при отсутствии перерегулирования при работе под нагрузкой.
Рис.8.10. Работа позиционной СУЭП при отработке малых перемещений
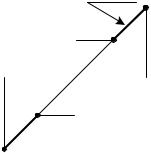
Реализация нелинейного РП на операционном усилителе выполняется так же, как и реализация функционального преобразователя, рассмотренная в примере 19 главы 7. Характеристика нелинейного РП (рис.8.6) заменяется отрезками прямых линий, т.е. выполняется кусочно - линейная аппроксимация характеристики РП (см. рис.8.11).
302
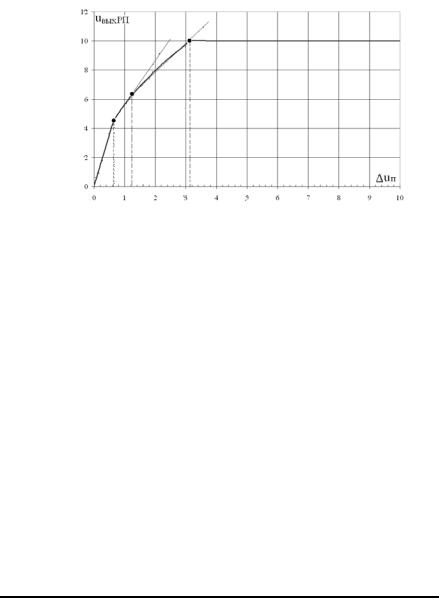
Рис.8.11. Кусочно – линейная аппроксимация
характеристики РП |
|
Характеристика РП имеет четыре |
участка, для которых |
определяются коэффициенты передачи. В соответствии с рассчитанными коэффициентами вычисляют параметры операционного усилителя, как это было рассмотрено в примере 19. Отличием реализации регулятора положения от реализации функционального преобразователя, рассмотренного в примере 19, является то, что характеристика РП должна быть реализована в первом и третьем квадрантах, для чего добавляется схема с добавочными резисторами и диодами с противоположным подключением к источнику питания –Uип2. В схеме РП также не должно быть конденсатора в цепи обратной связи операционного усилителя, моделирующего постоянную времени контура вихревых токов в функциональном преобразователе.
Регулятор положения ПИ структуры применяют для снижения динамической ошибки на входе РП, когда входное напряжение задания
uзп изменяется во времени и позиционная система работает в линейном режиме, отслеживая изменение uзп с минимально допустимой ошибкой.
Применяются и другие настройки РП, подробно рассмотренные в
[7,11,12].
Контрольные вопросы:
1. Почему при нагрузке электропривода возникает ошибка при отработке заданного перемещения?
303
2.Поясните основные режимы работы, возникающие при отработке заданных перемещений
3.Как определить величину ошибки при отработке заданного перемещения?
4.Зачем в характеристике регулятора положения выполняют зону нечувствительности?
5.Как рассчитать величину зоны нечувствительности характеристики регулятора положения?
6.Поясните переходные процессы на рис.8.8 (при ответе используйте характеристику регулятора положения).
7.Как устранить ошибку при отработке заданного перемещения?
8.Поясните переходные процессы на рис.8.9 (при ответе используйте характеристику регулятора положения).
9.С какой целью применяют ПИ регулятор положения?
10.Как реализовать нелинейный регулятор положения на операционном усилителе?
304