


7.Чему равна частота среза разомкнутого токового контура?
8.Как получить передаточную функцию замкнутого токового
контура?
9.Почему замкнутый токовый контур можно представить фильтром первого порядка?
5.1.2Анализ влияния внутренней обратной связи по ЭДС электродвигателя на работу токового контура
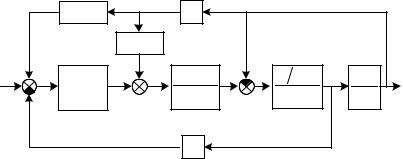
При настройке контура регулирования якорного тока внутренняя обратная связь по ЭДС двигателя не учитывалась, однако в некоторых случаях она оказывает существенное влияние на работу СУЭП электропривода. На рис.5.12,а представлена структурная схема контура регулирования якорного тока с учетом внутренней обратной связи по ЭДС двигателя, а на рис.5.12,б преобразованная структурная схема контура регулирования тока. Из рис.5.12,б видно, что передаточная функция объекта регулирования токового контура принимает вид колебательного звена, и для сохранения настройки на МО необходимо применить ПИД регулятор тока, что затрудняет его техническую реализацию. Найдем передаточную функцию замкнутого токового контура с ПИ регулятором тока, имеющего передаточную функцию (5.4), соответствующую настройке на МО:
W (p) = |
Ia (p) |
= |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
= |
|||
uзт (p) |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||
|
замт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+kот |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Тэp +1 |
|
|
kп |
|
|
|
1/R |
э |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2Тµ |
kпkот |
p |
|
T p + |
1 |
|
Тэp +1+ |
1 |
T p |
|
|
|||
|
|
|
|
|
|
|
|
µ |
|
|
|
(5.10) |
||||||||
|
|
|
|
|
|
R |
э |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
(T p +1) |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
|
|
|
kот |
|
э |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(T p +1)(2T T p2 +2T p + |
2Tµ |
|
|
|
|
|
|
|
|
|||||||||||
|
|
) +T p +1 |
|
|
|
|
||||||||||||||
µ |
µ э |
|
|
|
µ |
|
|
|
Tм |
э |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Для статического режима работы токового контура с учетом влияния внутренней обратной связи по ЭДС электродвигателя из выражения (5.10) при p=0 получается следующее соотношение:
132

u |
от |
= |
iуст |
= |
|
1 |
|
= |
T |
|
|
|
|
|
|
|
|
|
|
м |
|
. |
(5.11) |
||||
u |
i |
|
2Tµ |
|
|
2T + T |
|||||||
зт |
|
зад |
|
T |
+1 |
|
|
||||||
|
|
|
|
|
µ |
м |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
Из соотношения (5.11) видно, что вследствие влияния внутренней обратной связи по ЭДС электродвигателя контур регулирования якорного тока, настроенный на МО, становится статическим, т.е. появляется
ошибка регулирования ∆uт = uзт − uот ≠ 0 .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|
|
|
|
|
|
uзт |
|
∆uт |
|
|
|
Uу |
|
|
|
|
Ed |
|
|
|
Ea |
|
|
|
Тмр |
|
|
|
|
Ia |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
kп |
|
|
|
|
|
|
|
|
|
1 R |
э |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Wрт (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
uот |
|
|
|
|
|
|
Тµр +1 |
|
|
|
|
|
|
|
|
Тэр +1 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
uзт |
∆uт |
|
|
|
Uу |
|
|
|
|
Ed |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
||||||
|
|
|
|
|
kп |
|
|
|
|
1 R |
э |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Wрт (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Тµр +1 |
|
|
|
Тэр +1+ |
Tмp |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
uот |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
б)
Рис.5.12. Исходная (а) и преобразованная (б) структурные схемы контура регулирования якорного тока с учетом внутренней обратной
связи по ЭДС двигателя
Относительная статическая ошибка регулирования тока при скачке задания будет равна:
133
∆i = |
i |
зад −iуст |
=1− |
i |
уст |
=1 |
− |
T |
= |
2Tµ |
|
; |
|||||
|
|
|
|
|
|
|
м |
|
|
|
|||||||
|
|
i |
зад |
i |
зад |
2T |
+ T |
2T + T |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
µ |
м |
|
µ |
|
м |
(5.12) |
||
|
|
|
|
2Tµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
∆i% = |
|
|
|
100%. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2Tµ + Tм |
|
|
|
|
|
|
|
|
|
|
|
|||
Появление статической |
ошибки |
∆i объясняется |
|
непрерывным |
|||||||||||||
увеличением скорости вращения электродвигателя и, |
соответственно, |
||||||||||||||||
величины ЭДС незаторможенного двигателя. Ток якоря зависит как от ЭДС ТП, так и от ЭДС электродвигателя. Поэтому ко мпенсация влияния на ток якоря непрерывно растущей величины ЭДС электродвигателя в принципе возможна лишь путем соответствующего непрерывного увеличения ЭДС ТП. Для этого требуется непр ерывное увеличение выходного сигнала регулятора тока. Такое увеличение сигнала РТ в установившемся режиме в принципе возможно лишь за счет действия его интегральной части при наличии ненулевой установившейся ошибки на его входе. Именно поэтому, несмотря на наличие в структуре
регулятора |
интегральной составляющей, |
возникает |
определенное |
|
установившееся рассогласование |
между |
заданным и |
фактическим |
|
значениями тока якоря. Иными словами, в условиях изменения ЭДС электродвигателя ресурсы интегральной части регулятора расходуются на поддержание постоянства тока. На полную ликвидацию установившейся ошибки по току их уже недостаточно.
Как видно из (5.12) статическая ошибка регулирования тока зависит от соотношения постоянных времени Тµ и Тм , причем, чем
меньше величина Тм , тем больше ошибка в контуре регулирования тока.
Пример 7. Определить соотношение постоянных времени Tμ и Tм при которых ошибка регулирования якорного тока не превысит 10%.
На основании выражения (5.12) можно составить следующее уравнение: 2Tμ /(2Tμ + Tм) ≤ 0.1, из которого легко можно получить следующее условие: Тм ≥ 18Tμ, при котором ошибка регулирования якорного тока не превысит 10%.
В тех случаях, когда ошибка регулирования тока превышает заданную, необходимо принимать меры по устранению влияния внутренней обратной связи по ЭДС электродвигателя на работу токового контура.
134
Для устранения ошибки регулирования тока, необходимо увеличивать выходную ЭДС ТП Ed пропорционально величине ЭДС
электродвигателя Ea , для чего применяют комбинированную систему
регулирования якорного тока с положительной обратной связью по ЭДС электродвигателя [7,9,14].
На рис.5.13 показан наиболее рациональный вариант компенсирующей положительной обратной связи по ЭДС, которая воздействует непосредственно на вход ТП (на дополнительный вход суммирующего усилителя) через компенсирующее звено с передаточной
функцией Wк1(p) . Для получения сигнала, пропорционального величине ЭДС электродвигателя uоэ , применяют датчик ЭДС
(приложение Г), представленный на структурной схеме пропорциональным звеном с коэффициентом обратной связи по ЭДС
kоэ .
|
W |
(p) |
|
uоэ |
к |
оэ |
|
|
|
|
|
|
|
к2 |
|
|
|
|
|
|
|
|
|
|
|
|
РТ |
Wк1 |
(p) |
ТП |
|
Ea |
|
|
|
|
||
uзт |
Uрт |
Uу |
Ed |
1 Rэ |
Iа |
|
Ea |
|||||
Тэр +1 |
кп |
Rэ |
||||||||||
|
Трт p |
|
|
Тµр +1 |
|
|
Тэр +1 |
|
Тмр |
|
||
|
uот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кот |
|
|
|
|
|
|
|
Рис. 5.13. Компенсация влияния внутренней обратной связи по ЭДС электродвигателя
Передаточная функция компенсирующего звена Wк1(p) определяется из условия равенства прохождения сигнала ЭДС Ea через
датчик ЭДС, компенсирующее звено и ТП на вход сумматора для компенсации действия отрицательной обратной связи по ЭДС:
E |
(p)k |
W |
(p) |
kп |
= E |
(p) . |
(5.13) |
|
|
||||||||
a |
|
оэ к1 |
|
Tµp +1 |
a |
|
|
|
|
|
|
|
|
|
|
||
|
|
135 |
|
|
|
|
|
|
Из равенства (5.13) легко определяется передаточная функция компенсирующего звена:
W |
(p) = |
Tµp +1 |
. |
(5.14) |
|
||||
к1 |
|
kоэkп |
|
|
|
|
|
||
Для упрощения технической реализации компенсирующего звена с достаточной для практических целей точностью пренебрегают малой
постоянной времени Tµ и применяют упрощенную передаточную
функцию компенсирующего звена, которое становится пропорциональным:
W |
(p) ≈ |
1 |
= k |
k1 |
. |
(5.14) |
|
||||||
к1 |
|
kоэkп |
|
|
||
|
|
|
|
|
||
В СУЭП однозонного регулирования скорости при постоянстве номинального магнитного потока электродвигателя в качестве компенсирующего сигнала вместо сигнала по ЭДС двигателя (для чего необходимо применять датчик ЭДС) можно использовать сигнал
обратной связи по скорости uос , |
тогда |
передаточная |
функция |
||||
компенсирующего звена будет равна: |
|
|
|
|
|
|
|
W |
(p) ≈ |
kФн |
|
= k |
k1 |
, |
(5.15) |
|
|||||||
к1 |
|
kосkп |
|
|
|
||
|
|
|
|
|
|
||
где kос - коэффициент обратной связи по скорости вращения электродвигателя.
Иногда в качестве компенсирующего сигнала используют сигнал по напряжению двигателя [12]. В некоторых случаях компенсирующую обратную связь подают через компенсирующее звено с передаточной
функцией Wк2 (p) на дополнительный вход РТ (показано на рис.5.13 штриховой линией). В этом случае по аналогии с (5.13) (пренебрегая
136
малой постоянной времени Tµ ) определяется передаточная функция компенсирующего звена:
|
|
|
|
W |
(p) ≈ |
Tдp |
, |
(5.16) |
|
|
|
|
|
||||
|
|
|
|
к2 |
|
Tэp +1 |
|
|
|
|
|
|
|
|
|
|
|
где |
T |
= |
Tрт |
- постоянная |
времени |
дифференцирования |
||
|
||||||||
|
д |
|
kоэkп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
компенсирующего звена.
Пример 8. Для параметров СУЭП, приведенных в примере 5, оценить влияние обратной связи по ЭДС электродвигателя, если Тм =
0,08 с.
Используя выражение (5.12) определим ошибку в контуре регулирования якорного тока от влияния внутренней обратной связи по ЭДС электродвигателя: i = 2Tμ /(2Tμ + Tм) = 2*0,01/(2*0,01 + 0,08) =
0,02/0,1 = 0,2, что составляет 20% от установившегося значения тока. Результат моделирования переходных процессов uот = f(t) в
контуре тока при скачкообразном задании uзт = uзтmax = 10В для
условий, приведенных в примере 4, показаны на рис.5.14. Как видно из рис. 5.14 без учета влияния ЭДС электродвигателя заданное и
действительное значения |
тока якоря в |
установившемся режиме |
||
одинаковые uзт |
= uот = |
10В (кривая 1). |
Под действием |
ЭДС |
электродвигателя, |
величина действительного |
значения якорного |
тока |
|
(напряжения обратной связи по току) в установившемся режиме стала
меньше заданного максимального |
тока uот =8В |
< uзт =10В, |
т.е. |
появилась статическая ошибка |
регулирования |
якорного |
тока |
∆uт = uзт − uот =2В, что соответствует уменьшению величины якорного тока на 20%, при этом увеличилось перерегулирование.
137
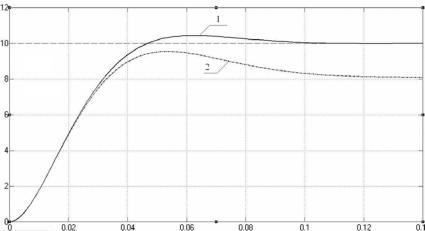
1- без учета влияния ЭДС двигателя; 2- с учетом влияния ЭДС двигателя
Рис.5.14. Реакция токового контура на скачек uзт=10В:
Пример 9. Для параметров СУЭП, рассмотренных в примерах 5 и
8 (kп = 25; Tμ = 0,01с; Rэ = 0,115Ом; Тэ = 0,05с; Тм = 0,08с; kот= 0,0208
В/А; Трт = 0,09с; kрт = 0,556), рассчитать параметры компенсирующих звеньев, устраняющих влияние ЭДС электродвигателя на работу токового контура.
Определим значение коэффициента обратной связи по ЭДС
электродвигателя исходя из того, что при максимальном значении Eamax = 240В максимальное напряжение обратной связи будет равно uоэmax= 10В:
kоэ= 10/240 = 0,0417. Если компенсирующая положительная обратная |
|
связь по ЭДС будет заведена на вход ТП, |
то применятся |
компенсирующее звено с передаточной функцией (5.14): kk1 = 1/(kоэkп) = 1/(0,0417*25) = 0,959. Если компенсирующая положительная обратная связь по ЭДС заводится на вход ПИ РТ, то применяется компенсирующее
звено с |
передаточной |
функцией (5.16): |
Wk2(p)= |
Тдp/(Tэp |
+ 1) = |
Tртp/(kоэkп)*(Тэp + 1) = 0,09p/(0,0417*25)(0,05p + 1) |
= = 0,086p/(0,05p + |
||||
1). |
|
|
|
|
|
На рис. 5.15 показаны результаты моделирования работы токового |
|||||
контура |
uот = f(t) |
при отработке |
скачкообразного |
задания |
|
uзт = uзтmax =10В. Кривая 1 – реакция токового контура без учета влияния обратной связи по ЭДС электродвигателя; кривая 2 – реакция
138
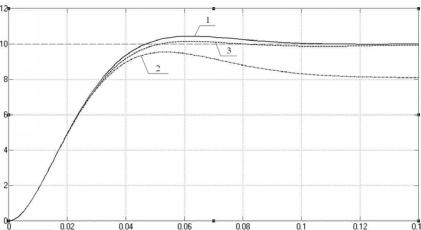
токового контура с учетом действия ЭДС электродвигателя; кривая 3 – реакция токового контура с положительной компенсирующей обратной связью по ЭДС электродвигателя. Из рис.5.15 видно, что в результате применения компенсирующей обратной связи кривая 3 приблизилась к оптимальному переходному процессу (кривая 1), однако небольшая
статическая ошибка осталась ( ∆i% ≤1%), что объясняется применением компенсирующего звена с упрощенной передаточной функцией без учета малой постоянной времени Tµ .
1- без учета влияния ЭДС двигателя; 2- с учетом влияния ЭДС двигателя; 3 – с компенсирующей обратной связью
Рис.5.15. Реакция токового контура на скачек uзт=10В.
На рис.5.16 показаны переходные процессы ЭДС ТП Ed = f(t) (кривые 1 и 2) и ЭДС электродвигателя Ea = f(t) (кривые 3 и 4) при
скачкообразном задании uзт = uзтmax . Кривые 1 и 3 соответствуют схеме
с компенсирующей положительной обратной связью по ЭДС электродвигателя (переходный процесс тока – кривая 3 на рис.5.15); кривые 2 и 4 – без компенсирующей обратной связи по ЭДС электродвигателя (переходный процесс тока – кривая 2 на рис.5.15).
139
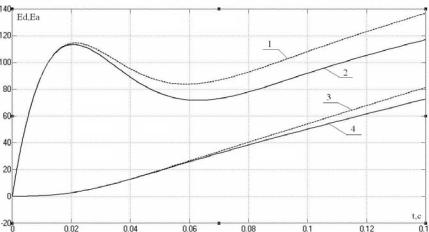
Рис.5.16. Переходные процессы Ed, Ea = f(t): 1 и 3 - с компенсирующей обратной связью по ЭДС; 2 и 4 - без компенсирующей
обратной связи по ЭДС
Как видно из сравнения переходных процессов на рис.5.16 применение положительной компенсирующей обратной связи по ЭДС
электродвигателя приводит к увеличению выходной ЭДС ТП Ed , что
приводит к увеличению якорного тока до заданного значения при полной компенсации действия ЭДС электродвигателя. Увеличение якорного тока до максимальной величины привело к тому, что темп изменения ЭДС
электродвигателя Ea (кривая 3) стал больше, чем темп изменения ЭДС электродвигателя Ea без компенсирующей обратной связи (кривая 4).
На практике необходимость введения компенсирующей обратной связи по ЭДС и параметры компенсирующего звена уточняется окончательно при наладке электропривода.
Анализ влияния внутренней обратной связи по ЭДС электродвигателя на свойства СУЭП позволяет сделать следующие выводы:
• уменьшается коэффициент передачи замкнутого контура тока, что снижает быстродействие САР и приводит к недоиспользованию двигателя по току;
140
•в режиме токоограничения (uзт = uзтmax) происходит увеличение тока выше уровня токоограничения при приложении чрезмерной нагрузки в стопорных режимах;
•увеличивается колебательность токового контура;
•увеличивается время восстановления скорости при набросе
нагрузки;
•увеличивается «ударное» падение скорости.
Контрольные вопросы:
1.Выведите передаточную функцию замкнутого токового контура
сучетом влияния внутренней обратной связи по ЭДС двигателя.
2.Чему равна относительная статическая ошибка регулирования тока под действием обратной связи по ЭДС?
3.Объясните физический смысл появления статической ошибки в контуре тока под действием внутренней обратной связи по ЭДС двигателя.
4.Каким образом выполняется компенсация влияния внутренней обратной связи по ЭДС двигателя на работу токового контура.
5.Как вывести передаточную функцию компенсирующего звена, если компенсирующая связь заводится на вход ТП?
6.Как вывести передаточную функцию компенсирующего звена, если компенсирующая связь заводится на вход регулятора тока?
7.Как влияет внутренняя обратная связь по ЭДС двигателя на работу контура регулирования тока?
8.Какой сигнал можно применять в качестве компенсирующего в однозонной системе регулирования?
5.1.3Анализ влияния режима прерывистого тока на работу токового
контура
При питании электродвигателя постоянного тока от реверсивного тиристорного преобразователя с раздельным управлением вентильными группами при малых значениях момента нагрузки а, следовательно, при малых значениях якорного тока, а так же при реверсе тока якоря, в работе ТП возникает режим прерывистых токов. На рис.5.17 представлены
диаграммы действительного выпрямленного тока |
i и его среднего |
значения |
|
141

i, Id
Id > Id гр
|
λ = |
2π |
гр |
|
|
|
|
|
|||||
|
p |
=I |
|
|
||
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
λ < |
гр |
|
|
|
|
|
p |
<I |
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
а)
t
t б)
t в)
Рис.5.17. Диаграммы токов тиристорного преобразователя в различных режимах работы
Id при работе тиристорного преобразователя в непрерывном (а),
гранично – непрерывном (б) и прерывистом (в) режимах работы. Режим гранично - непрерывного тока характерен тем, что коммутация тока на
интервале проводимости вентиля λ = 2π/ p |
начинает и заканчивается |
||||||
нулевым значением якорного тока. |
|
|
|
|
|||
Величина |
гранично |
– |
непрерывного |
тока Idгр |
определяется |
||
известным выражением [10]: |
|
|
|
|
|
|
|
|
Idгр |
= |
EdoSinα (1− |
πctg |
π), |
(5.17) |
|
|
|
|
ωoLэ |
p |
|
p |
|
где Ed0 - ЭДС |
тиристорного преобразователя |
при |
нулевом угле |
||||
регулирования α; |
|
|
|
|
|
|
|
142
ω0 = 2πfс – угловая частота напряжения питающей сети частотой fс , с-1;
р – «пульсность» схемы выпрямления (р=6 для мостовой схемы выпрямления, р=3 для нулевой схемы выпрямления);
LЭ - эквивалентная индуктивность цепи выпрямления, Гн.
В режиме прерывистого тока ввиду малости величины выпрямленного тока ТП запасенной энергии в индуктивности цепи выпрямления оказывается недостаточной для поддержания протекания тока через тиристор при отрицательном напряжении «анод – катод», что приводит к запиранию тиристора и появлению отрезков времени, на которых выпрямленный ток равен нулю (рис.5.17, в). В режиме прерывистого тока ТП ток начинает и заканчивается нулевым значением
в течение каждого интервала времени T =1/ pfc , где fс - частота
питающей сети. В этом случае с точностью до интервала времени T можно пренебречь электромагнитными переходными процессами в цепи
ТП-Д (исчезает электромагнитная инерция якорной цепи, поэтому Tэ =
0). При анализе работы ТП в режиме прерывистых токов вводят фиктивное сопротивление преобразователя, величина которого зависит
от длительности протекания выпрямленного тока λ и определяется зависимостью [10,11]:
Rфик = |
8π2f |
с Lэ = |
А |
, |
(5.18) |
2 |
2 |
||||
|
pλ |
|
λ |
|
|
где А = 8π2fс Lэ - постоянная величина.
p
При уменьшении выпрямленного тока ТП уменьшается и λ. Пределы изменения углов проводимости тиристоров в прерывистом
режиме лежат в пределах от λ = 2π/ p , соответствующего гранично – непрерывному режиму работы ТП, до λ= 0. При этих пределах изменения λ величина сопротивления Rфик будет изменяться от
значения Rфик = 2fсpLэ до бесконечности Rфик = ∞. Поскольку величина фиктивного сопротивления значительно больше величины
143

сопротивления якоря электродвигателя Rфик >> Ra , то эквивалентное сопротивление цепи ТП-Д будет в основном определяться величиной фиктивного сопротивления тиристорного преобразователя: Rэ ≈ Rфик .
Тогда в режиме прерывистого тока объект регулирования в контуре регулирования якорного тока будет описываться передаточной функцией
пропорционального звена с изменяющимся в функции λ коэффициентом передачи:
W |
(p) = |
1 |
= |
1 |
= λ2 . |
(5.19) |
|
|
|||||
ор |
Rэ |
|
Rфик |
А |
|
|
|
|
|
|
|||
Для настройки контура регулирования якорного тока на МО передаточная функция РТ в соответствии с (4.11) определится:
|
|
|
|
W |
(p) = |
1 |
|
|
R |
фик |
= |
|
1 |
|
= |
k' |
, |
(5.20) |
||||
|
|
|
|
2T p k |
|
k |
|
|
T' |
p |
p |
|||||||||||
|
|
|
|
рт |
|
|
п |
от |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
рт |
|
|
|
|
|
||
где |
T' |
= |
2Tµkпkот |
= |
2Tµkпkот |
λ2 - |
|
|
постоянная |
|
времени |
|||||||||||
|
|
|
|
|
||||||||||||||||||
|
рт |
|
|
Rфик |
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
интегрирования РТ в режиме прерывистого тока; |
|
|
|
|
|
|||||||||||||||||
|
k' = |
1 |
|
' - коэффициент передачи интегрального РТ. |
|
|||||||||||||||||
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
рт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, при переходе из режима непрерывного тока в режим прерывистого тока для сохранения настройки контура регулирования якорного тока на МО необходимо перейти от
структуры ПИ регулятора тока к структуре И регулятора тока и изменять постоянную времени РТ пропорционально квадрату
длительности протекания якорного тока λ2 . Чем глубже заходит ТП в режим прерывистого тока, тем меньше длительность протекания
якорного тока λ , тем меньше должна быть величина постоянной времени интегрирования Tрт' (или должна быть больше величина
коэффициента передачи k' ).
144