Условные графические обозначения основных электротехнических элементов
Электротехнический
Условное графическое обозначение
элемент
1
2
Линии
электрической связи (а), их
соединение (б), пересечене
(в),в однолинейном (г) и
многолинейном
(д)изображении
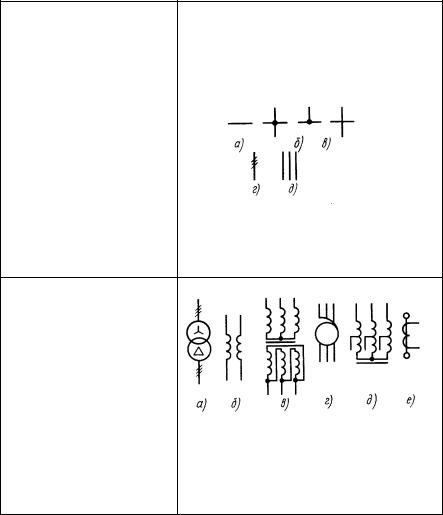
Обозначение
трансформатора напряжения (а), однофазного (б) и трехфазного (в) трансформаторов при развернутом способе; автотрансформатора (г,д) и трансформатора тока (е)
305
Продолжение таблицы А1
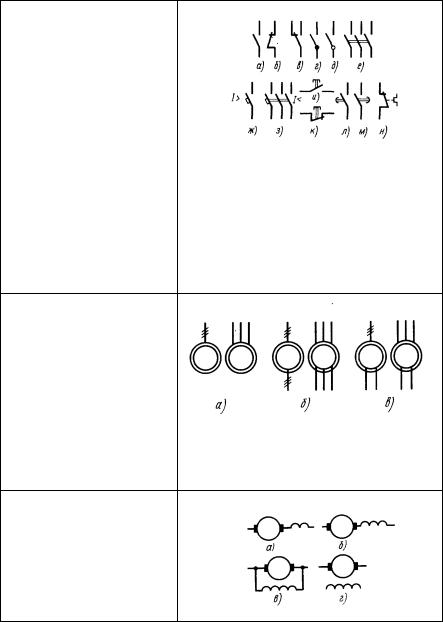
Контакты коммутационных устройств: а- замыкающий, б- размыкающий, в- переключающий, г, д, е- выключателей, ж, з- автоматов, и, к- кнопочного выключателя, л,м- реле времени (с выдержкой времени при срабатывании (л) и при возврате (м)), н- элетротеплового реле
Обозначение электрических машин переменного тока: а- асинхронных с короткозамкнутым ротором, б- асинхронных с фазным ротором, в- синхронных
Обозначение элементов машин постоянного тока: а- якоря и добавочных полюсов, б, в, г- последовательной, параллельной, и независимой обмоток возбуждения
306
Окончание таблицы А1
Электротехнический элемент
Условное графическое обозначение
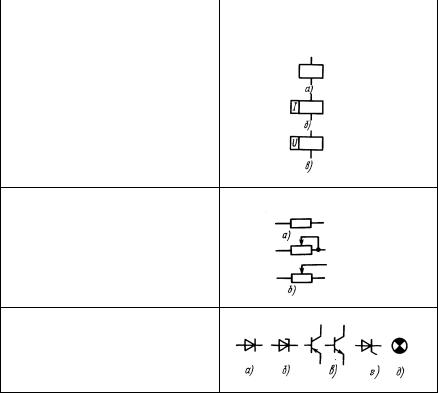
Обозначение
катушек
контакторов и реле (а), с указанием
обмотки тока (б) и напряжения (в)
Обозначение резисторов: а- нерегулируемый, б - регулирируемые.
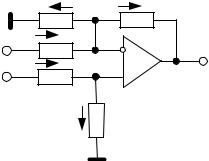
Обозначение полупроводниковых приборов и источников света: а- диода, б- стабилитрона, в- транзистора, г- тиристора, д- лампы накаливания
307
Таблица А2
Буквенные коды электрических элементов
Обозначение элементав однобуквенном
Обозначение элементав дваухбуквенном коде
Функциональное обозначение буквы( русские)
Вид элемента (устройства)
1
2
3
4
А
У
Устройство (общее обозначение), усилитель,
AD
ПУ
регулятор
AJ
ОУ
Полупроводниковый усилитель
AP
Операционный усилитель
AA
РТ
Панель (плата) монтажная
AR
РС
Регуляторы: тока
AQ
РП
скорости
положения
B
Преобразователи (датчики) неэлектрических
величин в электрические (кроме генераторов и
источников питания) и наоборот.
BE
СП
Сельсин (резольвер, энкодер) приемник
BC
СД
Сельсин (резольвер, энкодер датчик
BQ
ДП
Датчики: положения
BR
ТГ
частоты вращения (тахогенератор)
BV
скорости
С
Конденсаторы
D
Элементы логические, интегральные схемы
DA
Аналоговые микросхемы
DD
Цифровые микросхемы, логические элементы
DS
Устройства хранения цифровой информации
DT
Устройства задержки
Е
Элементы различные, для которых не
установлено буквенное обозначение
EH
Эн
Элемент нагревательный
EL
Л
Электрическая лампа
308
Продолжение таблицы А2
F
Элементы и устройства защитные
FA
РМ
Максимально – токовое реле (элемент
мгновенного действия)
FP
РТ
Реле тепловое (элемент инерционного действия)
FV
РН
Реле напряжения защитное (например,
FU
Пр
минимальное)
FS
Предохранитель плавкий
Элемент мгновенного и инерционного действия
G
Генераторы, источники питания
GB
Батарея
H
Устройства индикаторные и сигнальные
HA
Зв
Прибор звуковой сигнализации
HL
ЛС
Прибор световой сигнализации (лампа
сигнальная)
К
Реле, контакторы, пускатели
KA
РТ
Реле токовое
KV
РН
Реле напряжения
KK
РТ
Реле тепловое
KT
РВ
Реле времени
KP
РП
Реле поляризованное
KH
БР
Реле указательное (блинкерное)
РОП
Реле обрыва поля
РНТ
Реле нулевого тока
РУ
Реле ускорения
РБ
Реле блокировочное
РП
Реле промежуточное
РФ
Реле форсировочное
KM
Контактор, магнитный пускатель
Л,В,Н
Контакторы: линейный, вперед, назад,
У,Т,Д,
ускорения,
торможения,
динамического
П
торможения,
противовключения
L
Индуктивности, реакторы
М
Д
Элетродвигатели
АД,СД
Двигатели: асинхронный, синхронный
ДПТ
Двигатель постоянного тока
МДП
Машина двойного питания
ШД
Шаговый двигатель
ЛД
Линейный двигатель
309
Продолжение таблицы А2
P
Приборы и устройства измерительные и
испытательные,
указывающие,
регистрирующие, дифференцирующие
PA
A
Амперметр
PV
V
Вольтметр
PW
W
Ваттметр
PC
СИ
Счетчик импульсов
PF
Hz
Частотомер
Q
Устройства
механические
сильноточные
коммутирующие в силовых цепях
QF
АВ,В
Автоматический выключатель (автомат)
QS
Р
Разъединитель
Q
ВВ
Выключатель высокого напряжения
R
Резисторы
RP
П
Потенциометр
RS
Ш
Шунт измерительный
RK
Терморезистор
RT
Термистор
RU
Варистор
S
Устройства
коммутационные
для
цепей
управления, контроля, сигнализации и
SA
В
измерительных
SF
ВА
Выключатель
(переключатель)
цепей
SB
Кн
управления
SQ
ВП
То же, автоматический
ВК
Выключатели: кнопочный
SM
КК
положения
КУ
конечный
Командоконтроллер
Ключ управления
T
Тр
Трансформаторы:
TA
ТТ
тока
TV
ТН
напряжения
TM
ТС
силовой
TC
ТУ
цепей управления
TR
АТ
автотрансформатор
310
Окончание таблицы А2
U
Преобразователи электрических величин
в
электрические
UA
ДТ
Датчик тока
UV
ДН
Датчик напряжения
UZ
ТП
Тиристорный преобразователь
ПЧ
Преобразователь частоты
В
Выпрямитель
И
Инвертор
V
Приборы
электровакуумные
и
VD
Д
полупроводниковые
VM
Вп
Диод, стабилитрон
VC
Выпрямитель силовой
VS
Т
Выпрямитель цепей управления
VT
Т
Тиристор
VL
Л
Транзистор
Электровакуумный прибор
W
Линии электропередач, кабели, шины, антенны
X
Контактные
устройства
соединительные,
элементы выводов, разъемы
XP
Ш
Вилка (штырь) штепсельная
XS
Розетка (гнездо) штепсельное
XT
Кл
Разборное соединение (клеммник)
Y
Устройства
механические
с электрическим
YA
Эм
приводом
YB
ЭмТ
Электромагнит
YC
ЭмМ
Электромагнитный тормоз
Электромагнитная муфта
Z
Устройства
оконечные,
дифференциальные
трансформаторы, фильтры, ограничители.
311
ПРИЛОЖЕНИЕ Б Реализация элементов СУЭП на операционных усилителях
Элементы, входящие в состав аналоговых СУЭП (регуляторы, фильтры, задатчики, схемы выделения модуля и т.д.), реализуются, как правило, на операционных усилителях.
Операционный усилитель (ОУ) – это усилитель постоянного тока с большим коэффициентом усиления в разомкнутом состоянии. Наибольшее применение получили ОУ интегрального исполнения, которые характеризуются следующими основными показателями:
-дифференциальный коэффициент усиления в разомкнутом состоянии Куо=103…105;
- напряжение питания
Uп = 6,3…15 В;
- сопротивление нагрузки
Rн = 2…5 кОм;
- входное сопротивление
Rвх > 1 кОм;
- выходное сопротивление
Rвых = 0,2…1 кОм;
- полоса пропускания
f = 1 МГц.
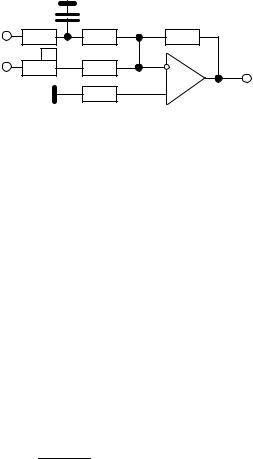
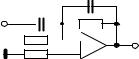
Входной дифференциальный каскад ОУ имеет инвертирующий вход 1 (обозначается кружком) и не инвертирующий (или прямой) вход 2. При подаче входного напряжения на инвертирующий вход на выходе ОУ появляется напряжение противоположной полярности (инверсное) по отношению к полярности входного напряжения, при подаче напряжения на прямой вход изменения полярности выходного напряжения не происходит. Использование обоих входов ОУ расширяет возможности его применения. Принципиальная электрическая схема включения ОУ с использованием как инверсного, так и прямого входов представлена на рис.Б.
312
Z3
I3
Iос
Zос
uвх1
I1
Z1
1
uвых
uвх2
I2
Z2
2
I4
Z4
Рис.Б. Схема включения ОУ
Выведем зависимость выходного напряжения ОУ от входных напряжений, для чего примем следующие допущения:
-входные токи ОУ малы и ими можно пренебречь ( iвх1 = iвх2 =0);
-потенциалы входов одинаковы по величине и близки к нулю
( U1 = U2 =0).
Для инверсного входа ОУ можно записать следующую систему уравнений (в операторной форме записи):
I1(p) − I3 (p) − Iос (p) = 0;
I
(p) =
u
(p)
− U (p)
;
вх1
1
1
Z1
(p)
U (p)
(Б.1)
I3
(p) =
;
1
Z3 (p)
Iос (p) =
U (p)
− u
(p)
1
вых
;
Zос (p)
где Zi (p) - полное сопротивление i – го участка цепи в операторной форме записи, Ом.
Решение системы уравнений (Б.1) относительно потенциала 1 входа U1(p) позволяет получить следующее равенство:
313
uвых (p) + uвх (p) Zос (p)
U1(p) =
Z1(p)
.
(Б.2)
+ Zос (p) Z
1+ Zос (p) Z (p)
(p)
1
3
Для прямого входа ОУ уравнение для определения потенциала 2
входа U2 (p) принимает следующий вид:
U2 (p) = I4 (p)Z4 (p) = I2 (p)Z4 (p) = uвх2 (p)
Z4 (p)
.(Б.3)
Z2
(p) + Z4 (p)
На основании равенства U1 = U2
можно приравнять выражения
(Б.2) и (Б.3) и решить равенство относительно выходного напряжения ОУ uвых (p) , в этом случае получается следующее уравнение:
uвых (p) = −uвх1(p) Zос (p)
+
Z1(p)
(Б.4)
Z4 (p)
+ uвх2
(p)
(1+
Zос (p)
+
Zос (p))
Z2
(p) + Z4 (p)
Z1(p)
Z3 (p)
Например, если используется только инверсный вход ОУ, то в этом случае Z2 (p) = ∞ , и выражение (Б.4) примет вид:
uвых (p) = −uвх1
(p) Zос (p)
,
(Б.5)
Z1(p)
из которого можно получить выражение для определения передаточной функции ОУ по инверсному входу:
314
W
(p) = uвых (p)
= Zос (p) .
(Б.6)
1
uвх1(p)
Z1(p)
Из выражения (Б.6) видно, что передаточная функция ОУ определяется отношением полного сопротивления в цепи обратной связи к полному сопротивлению на входе ОУ, представленными в операторной
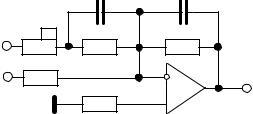
форме. Если в цепи обратной связи ОУ включен конденсатор C , а на
входе ОУрезистор R1 , то
в этом случае получится
следующая
передаточная функция ОУ:
W (p) = Zос (p)
=
1Cос (p)
=
1
=
1
, (Б.7)
1
Z1(p)
R1
R1Cос (p)
Tи (p)
т.е. ОУ является интегрирующим (И) с постоянной времени интегрирования, равной произведению R1Cос .
Если в ОУ используется только прямой вход, т.е. Z1(p) = ∞, то выражение (Б.4) примет вид:
uвых (p) = uвх2
(p)
Z4 (p)
(1 +
Zос (p)
). (Б.8)
Z2
(p) + Z4 (p)
Z3
(p)
Тогда на основании (Б.8) можно получить выражение для определения передаточной функции ОУ по прямому входу:
W (p) = uвых (p)
=
Z4 (p)
(1 + Zос (p)) . (Б.9)
2
uвх2
(p)
Z2 (p) + Z4 (p)
Z3 (p)
Если теперь в цепь обратной связи ОУ включить конденсатор, а во входной цепи использовать резисторы R2 , R3 и R4 , то в этом случае передаточная функция по прямому входу определится:
315
W (p) =
R4
(1+ Zос (p)) =
2
R2 + R4
Z3
(p)
. (Б.10)
1
1
= k(1
+
) = k +
R
C
ос
(p)
T p
3
и
В этом случае ОУ получился пропорционально – интегральным
(ПИ).
Таким образом, изменяя схемы включения и комбинации входных сопротивлений и сопротивления в цепи обратной связи ОУ, можно получить ОУ с заданной передаточной функций.
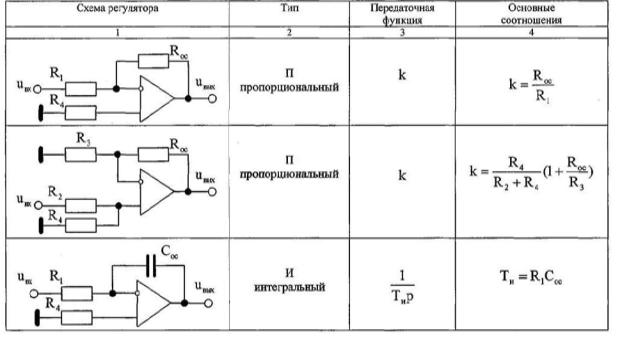
Основные схемы включений ОУ, их передаточные функции и основные соотношения представлены в таблице Б.
316
Таблица Б
Схемы и параметры основных регуляторов
317
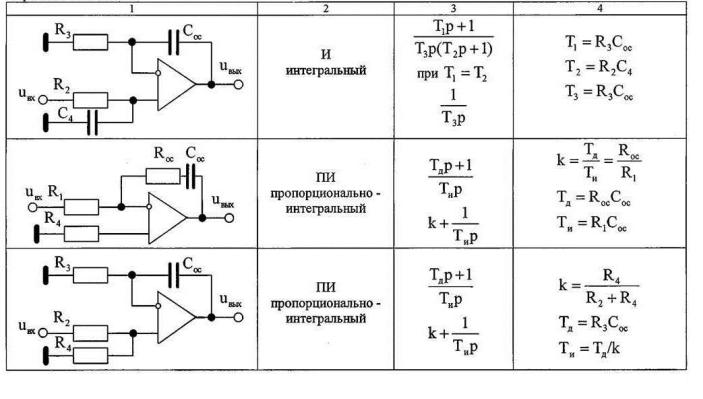
Продолжение таблицы Б
318
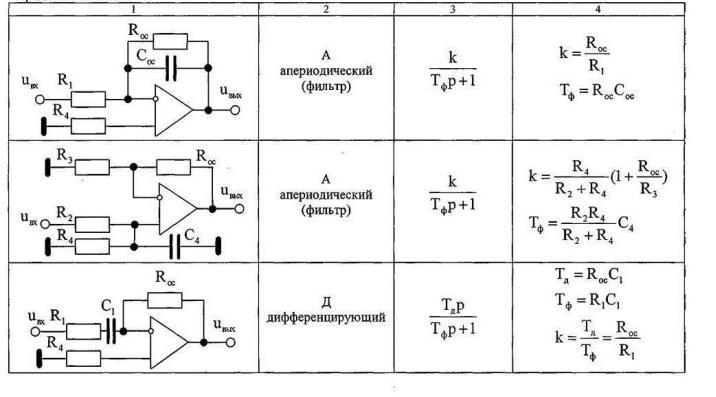
Продолжение таблицы Б
319
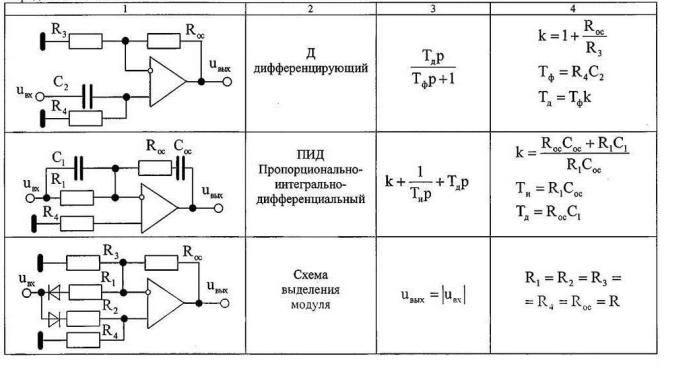
Окончание таблицы Б
320
ПРИЛОЖЕНИЕ В Реализация аналоговых датчиков обратных связей в СУЭП
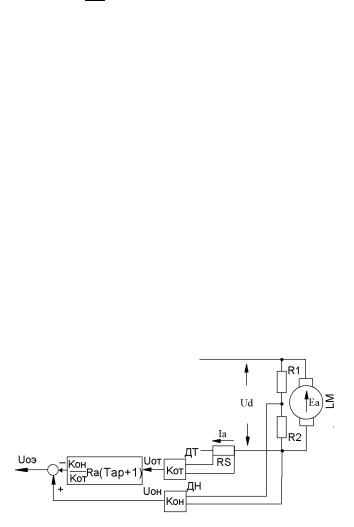
Датчик ЭДС. Непосредственное измерение величины ЭДС электродвигателя не представляется возможным, поэтому сигнал, пропорциональный ЭДС, выделяют косвенным путем на основании известного математического выражения через координаты, непосредственное измерение которых в электроприводе не вызывает никаких затруднений.
Уравнение равновесия для якорной цепи электродвигателя, записанное в операторной форме, определяется выражением:
Ua (p) = Ea (p) + Ia (p)Ra (Ta p +1) ,
(В.1)
где Ra - активное сопротивление якорной цепи электродвигателя, Ом;
Тa = La Ra - электромагнитная постоянная времени якорной цепи электродвигателя, с.
Как видно из выражения (В.1) дл я выделения ЭДС электродвигателя, необходимо иметь информацию о величинах напряжения и тока электродвигателя, которые в системе управления
представлены напряжениями обратных связей по
напряжению
uон = kонUa и току
uот = kотIa , где kон ,kот - коэффициенты обратных
связей по напряжению и току, соответственно.
Выразим выражение (В.1) через напряжения обратных связей
относительно ЭДС электродвигателя:
E
a
(p) = uон (p)
− uот (p) R
a
(T p +1) .
(В.2)
kон
kот
a
Преобразуем (В.2) к виду:
kонEa (p) = kоэEa (p)
= uоэ
(p) =
uон (p)
− uот (p) kонRa , (В.3)
Tap +1
Ta p +1
Ta p +1
kот
321
где uоэ = kоэEa - напряжение обратной связи по ЭДС, В; kоэ = kон - коэффициент обратной связи по ЭДС.
Как видно из (В.3) передаточная функция датчика ЭДС имеет вид:
W (p) = uоэ (p)
=
kоэ
,
(В.4)
дэ
Ea (p)
(Ta p +1)
т. е. датчик является инерционным и выполняет преобразование с запаздыванием, определяемым постоянной времени якорной цепи Тa .
Структурная схема датчика ЭДС приведена на рис.В.1.
Рис.В.1. Структурная схема датчика ЭДС
В соответствии с уравнением (В.3) и рис. В.1 происходит реализация датчика ЭДС на операционном усилителе, принципиальная схема датчика ЭДС представлена на рис.В.2.
Напряжение на выходе датчика ЭДС (рис. В.2) определяется выражением:
− u
= u
R5 /(R1
+ R2 )
− u
R5
.
(В.5)
оэ
он
R1R2
Сp +1
от R3
+ R4
R1 + R2
На основании уравнений (В.3) и (В.5) выводятся соотношения для расчета параметров датчиков:
R5
/(R1 + R2 ) =1;
R5
/(R3 + R4 ) = Rа kон / kот ;
(В.6)
R1R2 C = Tа .
R1 + R2
Если принять величину R2 = R1 , то выражения (В.6) примут вид:
323
R5
/ 2R1 =1;
R5
/(R3 + R4 ) = Rа kон / kот ;
(В.7)
R21 C = Tа .
На основании (В.7) задаются величиной емкости конденсатора С и последовательно рассчитывают величину сопротивления резисторов R1;R5;R3 + R4 . Резистор R3 необходим для подстройки датчика по каналу тока якоря.
Недостатком рассмотренного датчика является его низкое быстродействие, определяемое постоянной времени якорной цепи Тa , и
при большой величине постоянной времени применение датчика в системе управления электроприводом может оказаться невозможным.
Быстродействующий датчик ЭДС реализуется на основании уравнения (В.1), записанного через напряжения обратных связей:
u
оэ
(p) = u
он
(p) − u
от
(p) kонRa (T p +1) .
(В.8)
a
kот
В этом датчике, в отличие от инерционного, канал по напряжению выполняется безинерционным, а канал по току якоря имеет дифференцирующую составляющую. Структурная схема быстродействующего датчика ЭДС представлена на рис.В.3.
Напряжение на выходе быстродействующего датчика ЭДС (рис.В.4) определяется выражением:
− u
= (u
R2
− u
R2
(R4C1p +1)
)
1
. (В.9)
R3R4
оэ
он R1
от R3 + R4 (
C p +1)
R2C2p +1
1
R3 + R4
На основании уравнений (В.8) и (В.9) и учета фильтрации выходного напряжения датчика (рис. В.4) легко можно получить следующие соотношения:
R2 / R1 =1;
R3R4
C
= T
;
1
ф1
R2 /(R3 + R4 ) = kонRa / kот ; R3 + R4
(В.10)
R C = T ;
R2С2 = Tф2.
4 1 a
Постоянные времени фильтров Тф1 (фильтрация напряжения uот )
и Тф2 (фильтрация выходного напряжения датчика uоэ ) подбираются при наладке датчика и находятся в пределах 1…2 мс.
325
Задавшись величиной емкости конденсатора С1 , на основании соотношений (В.10) последовательно рассчитываются величины сопротивлений резисторов R4;R3;R2;R1 .
Передаточная функция датчика ЭДС (рис. В.4) соответствует выражению:
W (p) = uоэ (p) =
kоэ
.
(В.11)
дэ
Ea (p)
(Tф2p +1)
Недостатком быстродействующего датчика ЭДС является наличие
канала дифференцирования напряжения
uот , по
которому
могут
проходить на выход датчика высокочастотные помехи.
Еще одной возможностью реализации датчика ЭДС является применение наблюдающего устройства. Наблюдающие устройства в автоматизированном электроприводе предназначены для вычисления по известным (наблюдаемым) координатам объекта регулирования, координат, непосредственный замер которых невозможен. Наблюдающие устройства строятся по принципу замкнутой системы регулирования, минимизирующей ошибку между вычисленным и фактическим значением координаты. Для этого датчик моделирует фрагмент структурной схемы объекта регулирования, для которого в качестве входных координат используются первый наблюдаемый параметр и вычисленный (выходной) сигнал датчика. В результате преобразования входных сигналов получается сигнал, равный следующему (второму) наблюдаемому параметру по структурной схеме объекта регулирования, если вычисленный (выходной) сигнал датчика равен фактическому. В случае если выходной сигнал датчика отличается от фактического значения, то второй наблюдаемый параметр и его вычисленное значение будут отличаться на величину ошибки, по которой определяется или корректируется выходной сигнал датчика.
Для реализации датчика ЭДС на базе наблюдающего устройства, уравнение (В.1) представляют в интегральном виде:
(U
a
(p) − E
a
(p) − I
a
(p)R
a
)
1
- I
a
(p)R
a
= 0 . (В.12)
T p
a
326
Запишем уравнение (В.12) через напряжения обратных связей, тогда получится следующее уравнение:
(u
он
(p) − u
оэ
(p) − u
от
(p)R
kон )
1
-
T p
a k
от
a
(В.13)
kон
- u
от
(p)R
a
= ∆u
т
= 0
kот
Первое слагаемой в выражении (В.13) моделирует якорную цепь в структурной схеме электродвигателя постоянного тока, и определяет сигнал, пропорциональный якорному току, который сравнивается с сигналом фактического значения якорного тока. Если выходной сигнал
датчика ЭДС uоэ пропорционален ЭДС электродвигателя, то уравнение (В.13) будет справедливым. Фактически в процессе работы датчика ЭДС равенство (В.13) нарушается, и по величине ошибки ∆uт определяется
выходной сигнал датчика ЭДС. Структурная схема датчика ЭДС на базе наблюдающего устройства представлена на рис. В.5.
Датчик включает в себя интегратор И, пропорциональное звено с коэффициентом передачи kу , усиливающее ошибку ∆uт до величины
uоэ .
В соответствии с рис.А5 можно записать следующее выражение:
((u
он
− u
оэ
− u
от
R
kон )
1
- u
R
k
он )k
= u
. (В.14)
T p
от
a k
у
оэ
a k
от
от
a
В соответствии с (В.14) передаточная функция датчика ЭДС на базе наблюдающего устройства имеет вид:
327
Рис.В.5. Структурная схема датчика ЭДС на базе наблюдающего устройства
W (p) = uоэ (p)
=
kоэ
,
(В.15)
дэ
Ea (p)
Ta
kу p +1
где kу =10…15 – коэффициент
передачи
пропорционального звена,
повышающий быстродействие и точность работы датчика ЭДС.
Датчик ЭДС на базе наблюдающего устройства эквивалентен инерционному звену первого порядка с постоянной времени Ta / kу . В
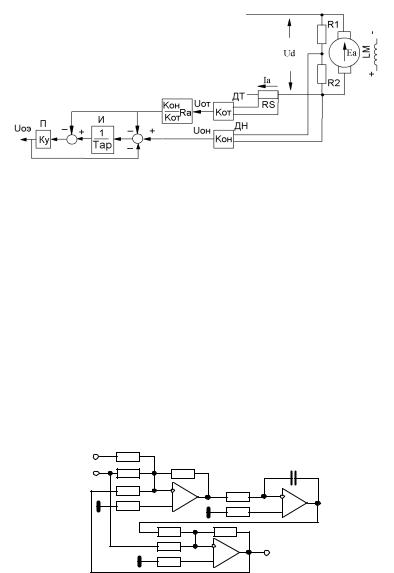
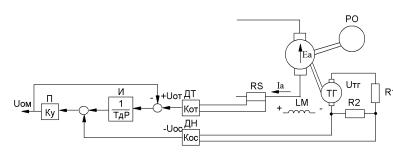
соответствии с (В.14) принципиальная схема реализации датчика ЭДС на базе наблюдающего устройства примет вид, представленный на рис.В.6.
+uон
R1
-uот
R2
R4
C1
R3
R5
DA1
DA2
R6
R8
R7
-u оэ
DA3
Рис.В.6. Принципиальная схема датчика ЭДС на базе наблюдающегоустройства
328
Для схемы, представленной на рис.В.6 справедливо следующее выражение:
(u
R4
− u
R
4
− u
R
4 ) R8 / R6
- u
R8
= −u
. (В.16)
он R
1
оэ R
3
от R
2
R C p
от R
7
оэ
5
1
Из сопоставления выражений (В.14) и (Б16) можно получить соотношения для расчета параметров датчика ЭДС:
R4
=
R4
=1;
R4
= R
kон ;
R1
R3
R2
a kот
R8
= k
;
R8
= R
kон k
.
(В.17)
R6
у
R7
a kот
у
R5C1 = Ta ;
По соотношениям (В.17) задавшись величиной емкости конденсатора C1 рассчитывают величину сопротивления резистора R5 ,
задавшись
величиной
сопротивления
резисторов R1 = R3 = R4 ,
рассчитывают величину
сопротивления
резистора R2 , задавшись
величиной
сопротивления
резистора R8 , рассчитывают величину
сопротивления резисторов R6 и R7 .
В
схеме рис.В.6
на выходе
операционного
усилителя
DA1 формируется сигнал,
пропорциональный первой
производной
якорного тока, который можно использовать в системе управления электроприводом.
Датчик момента нагрузки. Простейший датчик измерения момента нагрузки электродвигателя строится на основании уравнения движения электропривода, записанного в операторной форме записи:
Мa (p) − Mс (p) = JΣω(p)p .
(В.18)
329
Для электродвигателя постоянного тока независимого возбуждения уравнение (В.18) примет вид:
Мс (p) = kФнIa (p) − JΣω(p)p ,
(В.19)
т.е. для получения сигнала, пропорционального величине момента нагрузки (момента статического) необходимо из сигнала, пропорционального электромагнитному моменту электродвигателя (сигнала тока) вычесть сигнал, пропорциональный первой производной угловой частоты вращения электродвигателя.
Запишем уравнение (В.19) через напряжения обратных связей по току uот = kотIa и скорости uос = kосω:
kот
М
с
(p) = u
от
(p) −J
kотuос (p) p или
kФн
Σ kФнkос
uом (p) = uот (p) −Tдuос (p)p ,
(В.20)
где uом = kомMс - напряжение обратной связи по моменту нагрузки;
kом = kот / kФн -
коэффициент
обратной связи по
моменту
нагрузки, В/Нм;
Tд = JΣ
kот
-
постоянная времени дифференцирования канала
kФнkос
скорости, с.
Реализация датчика момента нагрузки на операционном усилителе представлена на рис.В.7.
С2
-Uос С1R2
+UотR1 -Uом
DA
Рис.В.7. Принципиальная схема датчика момента
330
Для схемы, представленной на рис.В.7, справедливо следующее уравнение (с учетом фильтрации выходного напряжения датчика момента нагрузки):
− u
= (u
R2
− u
R
C p)
1
.
(В.21)
R2C2p +1
ом
от R1
ос
2 1
Из сравнения уравнений (В.20) и (В.21) получаются выражения
для
расчета
параметров
датчика
момента
нагрузки:
R2 / R1 =1; R2C1 = Tд ; R2C2 = Tф .
Недостатком схемы датчика измерения нагрузки (рис.В.7) является необходимость прямого дифференцирования сигнала обратной связи по скорости. Т. к. в выходном напряжении тахогенератора присутствуют высокочастотные помехи от оборотных, зубцовых, полюсных и коллекторных пульсаций, то на выходе датчика момента произойдет значительное усиление сигнала помехи из – за дифференцирования сигала обратной связи по скорости. Для снижения действия помехи необходимо выполнить фильтрацию выходного напряжения датчика момента, подключив в цепь обратной связи операционного усилителя
конденсатор C2 . В этом случае передаточная функция датчика момента нагрузки будет иметь вид:
W (p) = uом (p)
=
kом
.
(В.22)
дм
Mс (p)
Tфp +1
На практике реализацию датчика момента нагрузки выполняют заменой операции прямого дифференцирования на операции интегрирования или фильтрации сигнала и дальнейшего их структурного преобразования. На рис.В.8,а показана структурная схема получения операции неявного дифференцирования сигнала путем интегрирования выходного сигнала в цепи отрицательной обратной связи и последующего усиления результирующего сигнала. При этом передаточная функция замкнутого контура примет вид:
331
u
(p)
Wр (p)
kу
T p
W (p) =
вых
=
=
=
д
,
W (p)W (p) +1
kу
Tд
зам
u (p)
+1
p +1
вх
р
oc
Тдp
kу
т.е. получили передаточную функцию дифференцирующего звена с фильтрацией. Коэффициент передачи kу выбирается таким образом,
чтобы обеспечить необходимое быстродействие при достаточной фильтрации входного сигнала.
uвх
Wр (p)
Ку
uвых
1
Tдp
Woc (p)
а)
АП
Uос
1
Uом
Тдр
+1
Ку
Uот
б)
Рис.В.8. Структурные схемы датчика с неявным дифференцированием
Для датчика момента нагрузки больше подходит структурная схема, представленная на рис.В.8,б, основанная на фильтрации
напряжения обратной связи по скорости uос и последующего его
вычитания из выходного сигнала апериодического звена А. Напряжение с выхода апериодического звена А определяется следующим выражением:
1
UА = (uос +uот )
, тогда выходное напряжение датчика
T p +1
д
момента нагрузки будет равно:
332
Uом = (uос − UА )kу = kу
uосТдp − uот
.
(В.23)
Tдp +1
С учетом (В.20) и (В.23) передаточная функция датчика момента нагрузки при kу =1 примет вид:
W (p) = uом (p)
=
kом
,
(В.24)
дм
Mс (p)
Tдp +1
т.е. получили инерционный датчик с постоянной времени, равной постоянной времени канала дифференцирования Тд .
Принципиальная электрическая схема датчика момента нагрузки при реализации его на операционных усилителях, представлена на рис.В.9.
R3
-Uос
R1
C1
R4
R6
-Uот
R2
R5
-U
DA1
DA2
R8
Рис.В.9. Принципиальная схема датчика момента неявного дифференцирования
Выходное напряжение датчика момента (рис.В.9) имеет вид:
333
R3
R3 )
R6
R5
R6
− U
= (−u
− u
+ u
,
R C p +1
ом
ос R
1
от R
2
ос R
4
3
1
из последнего уравнения можно получить расчетные соотношения для определения параметров датчика момента:
R3
= R3
=1; R6
= R6
=1;R C
= T .
R1
R2
R5
R4
3 1
д
Реализация датчика момента нагрузки также возможна на базе наблюдающего устройства, для чего исходное уравнение (В.20) необходимо записать в интегральном виде:
uот (p) − uом (p)
− uос (p) = ∆uс = 0 .
(В.25)
Tдp
Первое слагаемое в уравнении (В.25) моделирует электромеханический преобразователь в структурной схеме электродвигателя постоянного тока независимого возбуждения. Входными сигналами являются напряжение сигнала по току (моменту)
uот и выходной сигнал датчика момента uом . Первое слагаемое
определяет сигнал, пропорциональный частоте (скорости) вращения электродвигателя, который сравнивается с фактическим значением
частоты (скорости) вращения электродвигателя uос . Если выходной
сигнал датчика момента uом пропорционален моменту нагрузки на валу
электродвигателя, то уравнение (В.25) будет справедливым. Фактически в процессе работы электропривода равенство (В.25) нарушается, и по
величине ошибки ∆uс определяется выходной сигнал датчика момента.
Структурная схема датчика момента нагрузки на базе наблюдающего устройства показана на рис.В.10 и включает в себя
интегратор И с постоянной времени
интегрирования Тд ,
пропорциональное звено П с коэффициентом передачи kу , усиливающее сигнал ошибки ∆uс до величины uом , и описывается уравнением:
334
Рис.В.10. Структурная схема датчика момента нагрузки на базе наблюдающего устройства
(uот − uом − uос )kу = uом .
(В.26)
Tдp
В соответствии с последним уравнением передаточная функция датчика момента нагрузки на базе наблюдающего устройства имеет вид:
W (p) = uом (p)
=
kом
,
(В.27)
дм
Mс (p)
Tд
p +1
k у
где kу =10…15коэффициент передачи пропорционального звена, повышающий быстродействие и точность работы датчика момента.
Структурная схема датчика момента нагрузки реализуется принципиальной схемой, представленной на рис.В.11.
335
Мдин = Мa − Мс
+Uот
R1
R3
C1
-Uом
R2
R4
DA1
DA2
-Uос
R5
R7
R6
-Uом
DA3
Рис.В.11. Принципиальная схема датчика момента нагрузки на базе наблюдающего устройства
Для схемы рис.В.11 справедливо следующее уравнение для выходного напряжение датчика момента:
R3 − u
R3 )
R7
R5
R
− u
= (u
− u
7 .
(В.28)
R
C p
ос R
ом
от R
1
ом R
2
6
4
1
На основании (В.26) и (В.28) можно вывести соотношения для
расчета параметров датчика момента нагрузки:
R3
= R3
=1; R9
= R9 = k
;R C = T .
R1
R2
R8
R7
у
4
1
д
Выходное напряжение усилителя DA1 пропорционально величине динамического момента электродвигателя и может быть использовано в системе управления электроприводом.
Датчики угла и рассогласования. В качестве датчика угла поворота используют сельсины и вращающиеся трансформаторы. Сельсин – это электрическая микромашина переменного тока, на роторе которой расположена однофазная обмотка (обмотка возбуждения), а на статоре – трехфазная обмотка (обмотка синхронизации).
336
С
А eAB В
с1
с3
γ
с2
р2
р1
Рис.В.12. Схема включения сельсина
На рис.В.12 показана схема включения сельсина в амплитудном режиме работы. Обмотка возбуждения (роторная обмотка р1, р2) получает питание от источника однофазного переменного напряжения:
uв = UвmSin(ωct) ;
где Uвm -амплитудное значение напряжения возбуждения, В;
ωc = 2πfc - угловая частота питающей сети, Гц.
Магнитный поток, создаваемый обмоткой возбуждения, действует по оси обмотки возбуждения, которая занимает пространственное положение относительно оси отсчета (оси фазы А), смещенное за счет поворота ротора на угол γ, пересекает обмотки, расположенные на статоре (с1, с2, с3) и наводит в них фазные ЭДС, изменяющиеся с частотой цепи возбуждения и смещенные друг относительно друга на
пространственный угол 2π3 (1200):
337
eA = kт UвmCos(γ)Sin(ωct);
eВ = kт UвmCos(γ − 2π/ 3)Sin(ωct);
(В.29)
eС = kт UвmCos(γ − 4π/ 3)Sin(ωct);
где kт = Em / Eвm ≈ Em / Uвm - коэффициент трансформации
между
фазной статорной и роторной обмотками при их соосном положении.
Линейная ЭДС определяется разностью соответствующих фазных ЭДС, например, линейная ЭДС eАВ будет равна:
e
= e
−e
=
U
Sin(
π −γ)Sin(ω t) .
АВ
А
В
3k
т
вm
(В.30)
3
c
В этом случае, при начальном угле поворота γ = 0, выходная ЭДС eАВ ≠ 0 , что приводит к несоответствию между входной и выходной
координатами датчика. Для исключения данного несоответствия, начало отсчета угла поворота датчика (угла поворота ротора) перемещают на
угол π3 в направлении к фазе В поворотом статора сельсина при неподвижном роторе. Тогда в новой системе отсчета (ось отсчета смещена на угол θ = π3 − γ ) выходная линейная ЭДС eАВ определится зависимостью:
eАВ =
3kт UвmSin(θ)Sin(ωct) = EлmSin(ωct) .
(В.31)
Из (В.31) видно, что выходная ЭДС
eАВ изменяется с частотой
изменения
магнитного потока (частотой
питающей сети
ωс ),
а
амплитуда
eАВ определяется величиной
угла поворота
ротора
θ.
Поэтому
характеристика управления
сельсина (вход
–
выход)
Eлm = f (θ) в амплитудном режиме его работы имеет синусоидальную зависимость:
338
Eлm =
3kт UвmSin(θ) .
(В.32)
В соответствии с (В.32) при изменении угла поворота ротора сельсина от θ = −π/ 2 до θ = π/ 2 амплитуда выходной ЭДС сельсина
Eлm = −
изменяется от
3kт Uвm (при фазе ϕ=0) до Eлm = 3kт Uвm
(при фазе ϕ = π).
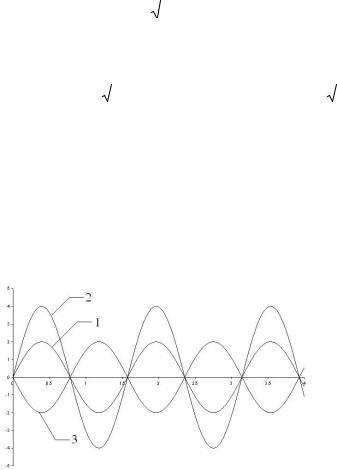
На рис.
(В.13)
показана выходная ЭДС сельсина (В.31) при
различных значениях угла поворота ротора сельсина: 1- при θ = θ1 , 2-
при θ = 2θ1 и 3- при θ = −θ1 . Как видно из рис.В.13, при увеличении
угла поворота ротора сельсина в два раза, амплитуда выходной ЭДС также увеличивается в два раза, а при изменении направления угла поворота ротора сельсина, фаза выходной ЭДС изменяется на противоположную.
Рис.В.13. Изменение выходной ЭДС сельсина при различных углах поворота ротора
Если угол
поворота ротора сельсина ограничить величиной
− π/ 3 ≤ θ ≤ π/ 3 ,
то характеристика управления сельсина (В.32)
практически становится прямолинейной.
Схема включения сельсинадатчика показана на рис.В.14. Ротор сельсина сочленяется с валом электродвигателя через измерительный редуктор ИР, который ставит в соответствие, например, максимальное линейное перемещение механизма (рабочего органа РО) с максимальным
339
углом поворота ротора сельсина. Таким образом, в исходном положении механизма ротор сельсина-датчика находится в исходном положении,
когда θ = 0 и Eлm = 0 , при максимальном перемещении механизма в одном направлении, ротор сельсина повернется на максимальный угол θ = θmax при котором Eлm = max ; при максимальном перемещении механизма в противоположном от исходного направлении, ротор сельсина повернется на угол θ = −θmax , при котором Eлm = −max .
Для получения напряжения постоянного тока, пропорционального углу поворота ротора сельсина (перемещению механизма), применяют фазовыпрямляющее устройство (ФВУ), величина выходного напряжения
которого Uоп зависит от амплитуды переменного входного напряжения,
а полярность выходного напряжения определяется фазой входного напряжения (рис.В.14).
Таким образом, по величине напряжения Uоп с выхода ФВУ можно судить о величине линейного перемещения механизма, а по полярности Uоп – о направлении перемещения от исходного положения.
Рис.В.14. Схема включения сельсинадатчика
Выходное напряжение ФВУ Uоп может применяться в качестве
напряжения обратной связи по положению механизма в позиционной СУЭП.
В режиме фазовращателя трехфазная обмотка статора получает питание от источника трехфазного напряжения с неизменной амплитудой
340
и частотой. Образующееся вращающееся магнитное поле в любой фиксированной точке статора, удаленной от оси отсчета (оси фазы А) на угол ϕ характеризуется величиной магнитного потока, равной:
Ф = Фm cos(ωct −ϕ) .
(В.32)
Следовательно, в обмотке ротора, ось которой сдвинута на угол θ = ϕ относительно начала отсчета, магнитным потоком Ф (В.32) будет наведена ЭДС, величина которой описывается выражением:
e
вых
=
3 E1m cos(ω t −ϕ) =
3 E1m cos(ω t −θ) , (В.33)
c
c
2 kт
2 kт
где E1m - амплитуда фазной ЭДС статора сельсина.
Из (В.33) очевидно, что характеристика управления сельсина в режиме фазовращателя (вход – выход) определяется равенством
ϕ = θи является линейной. Это говорит о том, что при повороте ротора
сельсина на определенный угол θ, точно на такой же угол изменится фаза выходного напряжения сельсина ϕ, снимаемого с обмотки ротора,
при неизменной величине амплитуды выходного напряжения.
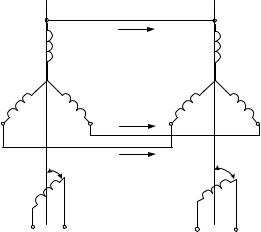
Трансформаторный режим работы сельсинов. Схема включения сельсинов в трансформаторном режиме работы представлена на рис.В.15.
341
с1
IА
с1
СД
СП
с3
с2 IВ
с3
с2
θ1
IС
θ2
р2
р2
р1
р1
~uв
~eвых
Рис.В.15. Схема включения сельсинов в трансформаторном режиме
работы
В этой схеме обмотка возбуждения сельсина - датчика (СД)
получает питание от
сети
однофазного
переменного тока ~ uв ,
статорные обмотки сельсинов соединены между собой, роторная обмотка сельсина - приемника (СП) является выходной, в которой индуцируется
которое после несложных преобразований примет вид:
343
Eвыхm =
3
kт Uвm
Cos(θ1 −θ2 ) .
2 kI
2Z
(В.37)
Как видно из (В.37) амплитуда выходной ЭДС зависит от разности
углов поворота роторов
сельсинов θ1 −θ2 = ∆θ,
т.е. от
рассогласованного положения роторов сельсинов, и при рассогласовании
∆θ = 0 получается максимальное значение амплитуды выходной ЭДС,
что не соответствует характеристике управления датчика, когда нулевому значению входного сигнала ставится в соответствие нулевое значение выходного сигнала. Если за согласованное состояние СД и СП принять взаимно перпендикулярное положение осей роторных обмоток, то в этом
случае в новой системе отсчета
θ1 −θ2 + π/ 2 характеристика
управления датчика рассогласования
Eвыхm = f (∆θ) примет вид:
3
kт Uвm
Sin(θ1
−θ2 ) = kдрSin(∆θ)
Eвыхm = 2 kI
2Z
(В.38)
,
где kдр - коэффициент передачи датчика рассогласования, В/град(рад);
Для получения напряжения постоянного тока, используемого в качестве сигнала в СУЭП, роторная обмотка СП подключается к ФВУ, на выходе которого будет сформировано напряжение постоянного тока,
величина которого будет определяться амплитудой Eвыхm , а полярность
– фазой ϕвыходной ЭДС, т.е. знаком угла рассогласования (фаза ϕ = 0 при ∆θ > 0 и ϕ = π при ∆θ < 0 ).
Если ротор СД использовать как устройство задания угла поворота, а ротор СП сочленить через измерительный редуктор с валом исполнительного электродвигателя, то при равенстве углов положения роторов СД и СП амплитуда выходной ЭДС будет равна нулю и будет равно нулю выходное напряжение ФВУ, что соответствует исходному положению. Если ротор сельсина СД повернуть на какой-то угол
θСД = θ1 , появится отличное от нуля рассогласование ∆θ ≠ 0 и отличная от нуля амплитуда выходной ЭДС и, следовательно, отличное
344
от нуля выходное напряжение ФВУ. Выходное напряжение ФВУ можно подать на вход СУЭП, что приведет к вращению исполнительного электродвигателя и повороту ротора СП. Как только ротор СП
повернется на угол θСП = θ1 = θСД , то в этом случае станет равным
выходной ЭДС и напряжение с выхода ФВУ, что приведет к остановке электродвигателя. Таким образом, исполнительный механизм повернулся на заданный угол (пример работы следящей системы управления).
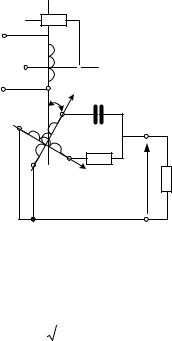
Вращающийся трансформатор – это двухфазная микромашина переменного тока, на неявнополюсных статоре и роторе которой имеются по две взаимно перпендикулярных обмотки (обмотка возбуждения и квадратурная на статоре, синусная и косинусная на роторе). Схема включения вращающегося трансформатора (ВТ) показана на рис.В.16.
α
с1
~uв
с4
с3
β
с2
θ d
р1
р4
р3
р2 q
Zнq Zнd
Рис.В.16. Схема включения вращающегося трансформатора в амплитудном режиме
В амплитудном режиме работы ВТ обмотка возбуждения, расположенная по оси α, получает питание от сети переменного тока с
частотой ωс
345
uв = UвmSin(ωct) .
Образующееся магнитное поле в разомкнутых обмотках ротора наводит ЭДС, амплитуды которых являются функциями угла поворота ротора ВТ (косинусная обмотка расположена по оси d, а синусная – по оси q):
Edm = kт UвmCos(θ) =
= EmCos(θ);
(В.39)
Eqm = kт UвmSin(θ) =
= EmSin(θ),
где kт - коэффициент трансформации между обмоткой возбуждения и каждой роторной обмоткой при их соосном положении.
Характеристики управления ВТ (В.39) претерпевают значительные искажения в режиме нагрузки, когда роторные обмотки ВТ включены на
нагрузочные сопротивления Zнd , Zнq , то по ним протекают токи,
вызывающие искажение магнитного потока и характеристик управления. Для устранения этого явления необходимо выполнить следующее
условие: Zнd = Zнq (так называемое вторичное симметрирование ВТ),
при этом полностью устраняются искажения характеристик управления ВТ в режиме нагрузки. Если по условиям эксплуатации невозможно
выполнить
равенство
Zнd = Zнq ,
используют
первичное
симметрирование ВТ, при котором реакция по оси β компенсируется замыканием накоротко квадратурной обмотки. Полная компенсация реакции якоря по оси β имеет место при условии равенства сопротивлений контуров обмотки возбуждения и квадратурной обмотки.
Таким образом, при работе ВТ в амплитудном режиме работы, при повороте ротора на угол θ, изменяется амплитуда выходной ЭДС роторных обмоток при постоянном значении фазы ( ϕ = 0 или ϕ = π).
В режиме фазовращателя обмотки статора получают питание от источника двухфазного напряжения. Образующееся при этом круговое поле наводит ЭДС в обмотке ротора, фаза которой линейно изменяется при повороте ротора. Данный режим можно получить в более простой
346
схеме с использованием источника однофазного напряжения (рис.В.17), при выполнении следующих условий:
XС =1/(ωсС) = R ;
сопротивление обмотки ротора Zр << R ; сопротивление нагрузки
Zн >> R . При подключении обмотки возбуждения к напряжению в обмотках ротора наводятся ЭДС:
epd = EmCos(θ)Sin(ωсt);
epq = EmSin(θ)Sin(ωсt),
где Em = kт Uвm .
α
с1
~uв с4
р4
с3 β
с2
θ d C
р1
р3 R
р2
q
Uвых
Zн
Рис. В.17. Схема включения ВТ в режимефазовращателя
Выходное напряжение ВТ будет определяться следующим выражением:
U
вых
=
2
k
U
вm
Sin(ω t + θ) .
(В.40)
2
т
c
347
Таким образом, при Uвm =сonst и вращении ротора амплитуда выходного напряжения Uвых = 22 kт Uвm = const , а фаза равна углу
поворота, при этом характеристика управления ВТ имеет вид: ϕ = θ.
С применением ВТ также можно реализовать датчик угла рассогласования. В этом случае обмотка возбуждения ВТдатчика получает питание от сети однофазного переменного тока, роторные цепи ВТ – датчика и ВТ – приемника соединяют между собой, а в роторной обмотке ВТ – приемника наводится выходная ЭДС, амплитуда которой пропорциональна синусу разности углов поворота роторов ВТ, а фаза - определяется знаком разности улов поворота роторов.
ВТ превосходят по классам точности сельсины, поэтому их применяют в тех случаях, когда требуется более точное измерение угловой координаты.








 R
R

 -Uом
-Uом






 р
р р
р

 α
α с
с




