

При входе какого либо из регуляторов в режим ограничения соответствующий контур регулирования выходит из подчинения внешнего контура (контур размыкается). Это приводит к накоплению ошибок во внешних контурах регулирования, что может привести не только к отклонению процессов регулирования от оптимальных, но даже к нарушению устойчивости многоконтурной системы регулирования (при замыкании обратной связи из – за большого рассогласования между заданным и действительным значениями регулируемой координаты возможны большие «броски» регулируемой координаты, например, тока якоря, что может привести к срабатыванию защиты).
Поэтому в системах подчиненного регулирования используются дополнительные средства ограничения переменных. Одним из таких способов ограничения переменных при реакции системы регулирования на управляющее воздействие являются задатчики интенсивности.
5.4.2 Ограничение переменных с помощью задатчиков интенсивности
Задатчик интенсивности (ЗИ) представляет собой нелинейное устройство, которое служит для обеспечения заданного темпа (интенсивности) изменения во времени выходного напряжения, формирующего задающее воздействие на входе регулятора. Наиболее широко распространены ЗИ первого порядка, ограничивающие первую производную задающего воздействия во времени [7,8].
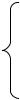
Структурная схема ЗИ первого порядка и графики, поясняющие его работу, представлены на рис.5.46.
Задатчик интенсивности состоит из последовательно включенных нелинейного элемента с релейной характеристикой РЭл и интегратора И
с постоянной времени интегрирования Tзи , охваченных отрицательной обратной связью по выходному напряжению ЗИ. Выходное напряжение
нелинейного элемента РЭл зависит от знака входного напряжения ∆u , которое определяется разностью между входным и выходным
напряжениями |
ЗИ |
∆u = uвх − uвых и описывается |
следующим |
выражением: UРЭ = U0sign(∆u) = U0sign(uвх − uвых ) , |
что можно |
||
описать следующей зависимостью: |
|
||
|
+U0 |
при uВХ > uВЫХ |
|
UРЭ= |
0 при uВХ = uВЫХ |
|
|
|
-U0 |
при uВХ < uВЫХ |
|
|
|
|
(5.45) |
|
|
196 |
|
|
Рассмотрим принцип действия ЗИ по графикам, представленным |
||||||||
на рис.5.46. Если при нулевых начальных условиях на вход ЗИ скачком |
|||||||||
подать входное напряжение uвх , то выходное напряжение РЭл скачком |
|||||||||
достигнет установленной величины ограничения +U0 в соответствии с |
|||||||||
(5.45) |
т.к. |
uВХ > uВЫХ . |
К |
входу |
интегратора |
будет |
приложено |
||
постоянное по величине напряжение +U0, поэтому выходное напряжение |
|||||||||
интегратора (т.е. выходное напряжение ЗИ) начнет линейно |
|||||||||
увеличиваться с темпом, определяемым отношением + U0 / TЗИ . |
|||||||||
|
uвх |
|
РЭл |
|
|
И |
uвых |
|
|
|
|
u |
|
+U0 |
1 |
|
|
||
|
|
|
|
|
|
Тзи р |
|
|
|
|
uвх |
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
UРЭ |
|
+U0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
uвых |
|
+U0 |
|
-U0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
t1 |
|
|
t2 |
t3 |
|
|
|
|
|
ТЗИ |
|
|
|
|
|
|
|
Рис.5.46. |
Структурная |
схема |
и |
графики |
работы |
задатчика |
||
|
|
|
|
|
интенсивности |
|
|
||
|
|
|
|
|
197 |
|
|
|
|
Разность напряжений на входе РЭл ∆u = uВХ − uВЫХ по мере увеличения выходного напряжения ЗИ будет уменьшаться и в момент времени t1 станет равна нулю, что приведет к «сбрасыванию» выходного напряжения РЭл в ноль; поэтому интегратор перестает интегрировать и
на |
его |
выходе |
устанавливается |
напряжение, |
равное |
входному uВЫХ = uВХ . В |
момент времени |
t2 входное напряжение |
|||
мгновенно становится равным нулю, поэтому ошибка на входе РЭл становится отрицательной ∆u = −uВЫХ , что приводит к появлению на
выходе РЭл установленной величины ограничения –U0; поэтому выходное напряжение интегратора начнет уменьшаться с темпом,
определяемым отношением − U0 / TЗИ . В момент времени t3 выходное
напряжение ЗИ становится равным нулю, следовательно, и выход РЭл становится равным нулю.
Как видно из рассмотрения работы ЗИ, темп изменения выходного
напряжения |
ЗИ, определяемый отношением |
U0 / TЗИ , |
можно |
регулировать |
изменением напряжения ограничения РЭл |
U0, и |
|
изменением постоянной времени интегратора TЗИ .
В зависимости от темпа изменения входного напряжения ЗИ
может работать в двух режимах: |
|
|
|
|
|
||||||||||
1. если |
|
duВХ / dt |
|
≥ |
|
U0 |
/ TЗИ |
|
, |
выходное напряжение ЗИ будет |
|||||
|
|
|
|
||||||||||||
изменяться |
с |
|
заданным |
темпом, |
определяемым отношением |
||||||||||
U0 / TЗИ (режим отработки заданного темпа); |
|||||||||||||||
2. если |
|
duВХ / dt |
|
< |
|
U0 |
/ TЗИ |
|
, |
выходное напряжение ЗИ будет |
|||||
|
|
|
|
||||||||||||
изменяться |
с |
|
темпом входного напряжения |
|
duВХ / dt |
|
(режим |
||||||||
|
|
|
|||||||||||||
слежения). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пример 12. Реализовать на операционных усилителях задатчик интенсивности, настроенный на изменение выходного напряжения с темпом 40 В/с.
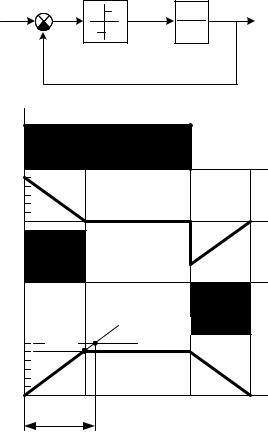
Одна из возможных принципиальных схем ЗИ, реализованного на операционных усилителях, представлена на рис.5.47.
198
На усилителе DA1 реализован нелинейный элемент РЭл в цепи обратной связи которого отсутствует резистор обратной связи, поэтому коэффициент передачи DA1 очень большой, что и обеспечивает получение релейной характеристики. Выходное напряжение РЭл ограничено по уровню при помощи блока ограничения БО, в котором имеется возможность установки необходимой величины напряжения ограничения U0. Для обеспечения одинакового коэффициента передачи по обоим входам DA1 величины сопротивлений резисторов R1 и R2 принимаются равными, например R1 = R2 = 10 кОм. Величину напряжения ограничения блока БО примем равной U0= ±10 В.
На усилителе DA2 реализован интегратор, постоянная времени интегрирования которого определяется равенством: TЗИ = R3*C1. Для обеспечения заданного темпа ЗИ должно соблюдаться равенство: U0/ TЗИ = 40 В/с, из которого определяется величина TЗИ = U0/40 = 10/40 = 0,25 с. Зададимся величиной емкости конденсатора С1= 1 мкФ, и рассчитаем величину сопротивления резистора R3 = TЗИ/ С1 = 0,25/1*10-6 = 250 кОм. С учетом возможности подстройки величины TЗИ, примем R3 = 300 кОм.
БО |
|
|
+uвх R1 |
|
С1 |
R2 |
-U0 R3 |
+uвы |
|
|
|
DA1 |
|
DA2 |
R5 |
|
|
-uвых |
R4 |
|
|
|
|
DA3 |
|
|
Рис.5.47. Принципиальная электрическая схема ЗИ
На усилителе DA3 реализован инвертор для обеспечения отрицательной обратной связи на входе DA1 (т.е. получения различной полярности входного и выходного напряжения ЗИ), поэтому должно выполняться равенство величин сопротивлений R4 = R5. Примем R4 = R5
= 10 кОм.
199

Если ЗИ включить на входе регулятора скорости, то на выходе ЗИ будет сформировано напряжение uзс , изменяющееся с заданным
темпом, определяемым отношением U0 / TЗИ . Поэтому можно записать следующее равенство:
duзс / dt = U0 / TЗИ ,
если в последнем выражении левую и правую части разделить на коэффициент обратной связи по скорости, то получим уравнение:
duзс / kос = dω |
= ε = |
U0 |
|
, |
|
T k |
|
||||
dt |
dt |
|
ос |
||
|
|
|
ЗИ |
||
из которого легко можно определить постоянную времени ЗИ,
необходимую |
для |
формирования |
|
требуемого |
ускорения |
|||
электродвигателя: |
|
|
|
|
|
|
|
|
|
|
T |
= |
U0 |
. |
|
(5.46) |
|
|
|
|
|
|||||
|
|
ЗИ |
|
εkос |
|
|
|
|
Таким образом, для обеспечения требуемого ускорения |
||||||||
электродвигателя |
|
d ε/=dt ω необходимо |
задаться |
величиной |
||||
напряжения ограничения U0, и по (5.46) рассчитать постоянную времени |
||||||||
TЗИ , (либо задаться величиной TЗИ |
и рассчитать величину напряжения |
|||||||
ограничения U0). |
|
|
|
|
|
|
|
|
Рассмотрим |
применение ЗИ |
|
в |
СУЭП |
для формирования |
|||
требуемого ускорения электропривода.
5.4.1.1 Формирование требуемого ускорения в однократноинтегрирующей системе регулирования
Структурная схема однократно – интегрирующей системы регулирования с включенным на входе ЗИ, представлена на рис.5.48.
uз |
|
РЭл |
U0 |
|
И |
ЗКC |
ω |
|
|
|
I |
|||||||||||||||||
|
|
|
|
|
|
|
|
uзс |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
1/ kос |
Тмр |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тзи р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Tµp(2Tµp(Тµр +1) +1) +1 |
|
|
|
Rэ / с |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.48. Структурная схема однократноинтегрирующей системы регулирования с ЗИ
200
В структурной схеме однократно – интегрирующая система регулирования скорости представлена в виде замкнутого контура регулирования скорости электродвигателя ЗКС с передаточной функцией оптимального контура третьего порядка, входной координатой которого
является выход ЗИ, т.е. напряжение задания скорости uзс , а выходной - скорость вращения электродвигателя ω. Дифференцированием скорости ω получается координата якорного тока Ia .
Если ЗИ работает в режиме отработки заданного ускорения, т.е. выходное напряжение ЗИ uзс изменяется линейно с заданным темпом,
то в этом случае Рэл находится в ограничении и изменение uзс на входе
Рэл не ок азывает влияния на работу ЗИ. В этом случае структурная схема рис.5.48 может быть представлена в виде, показанном на рис.5.49, где входной координатой является напряжение ограничения U0 на входе интегратора ЗИ.
В этом случае система регулирования работает в линейном режиме, т.е. ни один из регуляторов не находится в ограничении.
U0 |
|
И |
ЗКC |
ω |
|
|
|
Ia |
|||||||
|
uзс |
|
|
|
|||||||||||
|
1 |
|
|
1/ kос |
Тмр |
||||||||||
|
|
|
Тзи р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4Tµp(2Tµp(Тµр +1) +1) +1 |
|
|
|
Rэ / с |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.49. Структурная схема однократноинтегрирующей системы регулирования в линейном режиме работы
Определим, как будут изменяться во времени скорость вращения электродвигателя и якорный ток при линейном задании uзс , для чего выразим передаточную функцию системы регулирования, когда входной координатой является напряжение U0, а выходной – якорный ток Ia :
W (p) = |
Ia (p) |
= |
Tм |
|
с |
1 |
|
. |
||
|
|
|
|
|
|
|||||
1 |
U0 |
(p) |
|
Tзи Rэkос 4Tµp(2Tµp(Tµp +1) +1) +1 |
|
|||||
|
|
|
||||||||
201

Из полученного выражения можно определить якорный ток:
Ia (p) = |
U0 (p) |
Tмс |
|
1 |
, |
(5.47) |
|
Rэkос Q3 (p) |
|||||||
|
Tзи |
|
|
||||
где Q3 (p) - оптимальный полином третьего порядка.
Как видно из (5.47) переходный процесс якорного тока будет
определяться |
полиномом |
Q3 (p) и |
будет |
характеризоваться |
перерегулированием σ = 8% и временем |
нарастания 7,6 Tµ . На |
|||
основании таблицы 1 переходный процесс для якорного тока будет описываться следующим выражением:
Ia (τ) = |
U0 |
Tмс |
(1−e−2τ −e−τ |
2 |
|
sin( |
|
τ)), (5.48) |
|
|
3 |
||||||||
|
|
|
|
||||||
|
Tзи |
Rэkос |
3 |
|
|
|
|
||
где τ = t / 4Tµ - относительное время.
Установившееся значение якорного тока будет соответствовать величине динамического тока, необходимого для обеспечения требуемого ускорения:
Ia уст = |
U0 |
Tмс |
= Iaдин . |
(5.49) |
|
||||
|
Tзи |
Rэkос |
|
|
Из (5.49) видно, что величина динамического тока определяется
отношением U0 / TЗИ , т.е. темпом изменения выходного напряжения ЗИ.
Для определения переходного процесса изменения во времени скорости вращения электродвигателя проинтегрируем выражение (5.48):
202

|
R |
/ c τ |
|
|
|
U |
|
|
4Tµ |
|
|
|
e−2τ |
|
||||
ω(τ) = |
Tэ |
|
∫Ia (τ)dτ =T |
0 |
|
|
(τ−1 |
+ |
2 + |
|
|
|||||||
k |
ос |
|
||||||||||||||||
|
м 0 |
|
|
|
|
зи |
|
|
|
|
|
|
||||||
+ e-τ sin( |
|
τ) + |
|
|
cos( |
|
|
τ)) = ∆ω |
|
(τ−1+ |
e−2τ |
|
||||||
3 |
3 |
3 |
|
+ (5.50) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
3 |
|
|
|
|
|
|
|
дин |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
+ e-τ sin( |
|
τ) + |
|
|
cos( |
|
|
τ)), |
|
|
|
|
|
|
||||
3 |
|
3 |
|
3 |
|
|
|
|
|
|
||||||||
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где τ = t / 4Tµ - относительное время.
После затухания переходных составляющих в выражении (5.50) получается установившееся линейное изменение скорости вращения с заданным ускорением:
|
|
|
|
ωуст (τ) = |
U |
0 |
4Tµ |
|
(τ−1). |
(5.51) |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Tзи kос |
|
|
|
||
Если в выражении (5.51) подставить значение относительного |
||||||||||
времени τ = t / 4Tµ , то получится |
следующее уравнение: |
|
||||||||
ω |
уст |
(t) = U0 |
1 |
(t − 4T ) |
= ∆ω |
(t − 4T ), |
(5.52) |
|||
|
||||||||||
|
Tзи |
µ |
|
|
дин |
µ |
|
|||
|
|
kос |
|
|
|
|
|
|
||
из |
которого |
следует, что |
изменение скорости |
во времени |
||||||
происходит с заданным темпом, определяемым отношением U0 / TЗИ , с запаздыванием относительно заданной скорости 4Tµ .
Пример 13. Для однократно – интегрирующей системы регулирования с параметрами, рассчитанными в примерах 5 и 11, определить динамические свойства при пуске от ЗИ, обеспечивающего величину динамического тока Iдин = 1,2*Iн.
Определим величину требуемого ускорения электродвигателя с динамическим током (моментом), равным Iдин = 1,2*Iн= 1,2*192 =230 А, если суммарный момент инерции электропривода равен JΣ= 8,52 кГм2: ε= dω/dt= Iдин*c/ JΣ= 230*3,5/8,52= 94,5 с-2. Зададимся величиной напряжения ограничения Рэл равным U0= 10В, тогда постоянная времени интегратора ЗИ на основании (5.46) будет равна: ТЗИ= 10/(94,5*0,1587)=
0,667с.
Схема модели с рассчитанными параметрами представлена на рис.5.50.
203

Рис.5.50. Схема модели однократноинтегрирующей системы регулирования с ЗИ
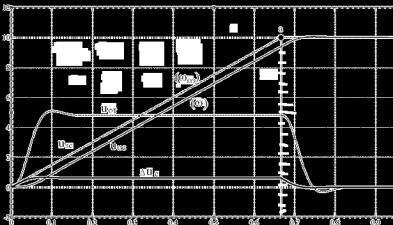
Проанализируем результаты моделирования различных режимов работы однократноинтегрирующей системы регулирования с ЗИ.
На вход ЗИ скачком подается напряжение задания, равное uз= 10В. Реакция однократноинтегрирующей системы регулирования на
линейное изменение задающего сигнала uзс при нулевых начальных
условиях представлена на рис.5.51 при пуске на холостом ходу (рис.5.51,а) и при номинальной нагрузке на валу электродвигателя
(рис.5.51,б).
а)
204

б)
Рис.5.51. Реакция однократноинтегрирующей системы регулирования на линейное изменение напряжения uзс
На рис.5.51 представлены переходные процессы напряжений: задания скорости uзс , пропорционального заданной скорости идеального
холостого хода ω0з ; напряжения обратной связи по скорости пропорционального действительной скорости вращения электродвигателя ω ; ошибки по скорости на входе РС ∆uс = uзс − uос , пропорциональной величине динамической ошибки регулирования скорости ∆ωдин ; напряжения обратной связи по току якоря uот ,
пропорционального величине якорного тока Ia . Как видно из рис.5.51,а линейное изменение напряжения uзс вызывает линейное изменение с тем
же темпом uос |
(т.е. скорости |
электродвигателя) с |
отставанием от |
|||
напряжения uзс на величину 4Tµ . |
При этом |
установившаяся |
||||
динамическая |
(скоростная) |
ошибка |
регулирования |
скорости |
||
∆uс = uзс − uос |
на входе РС и определяет величину динамического тока |
|||||
якоря электродвигателя |
uзт |
= kрс (uзс − uос ) = kотIдин . |
Поскольку |
|||
величина ∆uс при этом остается постоянной, то и величина якорного тока также остается постоянной. Переходный процесс якорного тока характеризуется перерегулированием σ = 8% , временем нарастания 7,6 Tµ и временем достижения максимума 10 Tµ .
205
На рис.5.51,б показаны переходные процессы при пуске электродвигателя с номинальным моментом сопротивления на валу
электродвигателя ( Ic = Iн ). В этом случае дви жение электропривода начинается тогда, когда момент электродвигателя превысит момент нагрузки (т.е. когда выполнится условие Ia > Ic ). Поэтому существует
отрезок времени (время задержки tз ), когда на входе РС действует только напряжение uзс , а напряжение обратной связи по скорости равно нулю. За время задержки tз на выходе РС будет сформировано напряжение uзт = kрсuзс = kотIc . Затем начинается движение
электропривода и появляется сигнал обратной связи по скорости электродвигателя. В этом случае на входе РС установится динамическая
ошибка регулирования скорости ∆uс = uзс − uос , большая, чем ошибка ∆uс = uзс − uос на рис.5.51,а, на величину, пропорциональную статическому току ( kотIc / kрс ).
Вследствие этого установившееся значение якорного тока будет равно Iуст = Iдин + Ic , поэтому разгон электропривода также будет происходить с заданным ускорением.
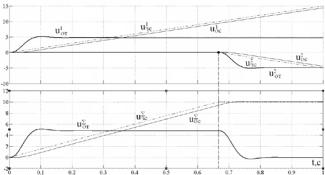
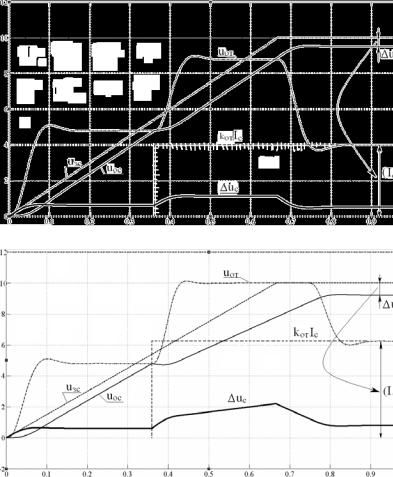
Для расчета реакций системы регулирования на линейное изменение напряжения на входе РС с заданным темпом, определяемым
отношением U0 / TЗИ , можно сформировать два противоположных линейных сигнала, смещенных во времени на величину TЗИ (рис.5.52).
Рис.5.52. Полные реакции однократной системы регулирования на сигнал ЗИ
206
На рис.5.52 показаны реакция (напряжения обратной связи по току u1от , и обратной связи по скорости u1ос ) на линейно изменяющийся с
заданным темпом U0 / TЗИ сигнал задания скорости u1зс ; реакция (напряжения обратной связи по току uот2 , и обратной связи по скорости uос2 ) на линейно изменяющийся с заданным темпом − U0 / TЗИ сигнал
задания скорости u2зс , смещенный на величину TЗИ ; и полные реакции системы регулирования как суперпозиции частных реакций на смещенные во времени линейно изменяющиеся воздействия u1зс и u2зс :
напряжения |
uотΣ = u1от + uот2 |
и uосΣ = u1ос + uос2 . |
При этом |
uΣзс = u1зс + uзс2 |
является смоделированным сигналом |
выходного |
|
напряжения ЗИ, когда на вход ЗИ скачком подается напряжение задания.
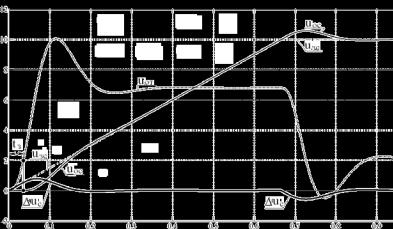
В схеме модели рис.5.50 ЗИ смоделирован в соответствии с его структурной схемой рис.5.46 и описанием (5.45), получившиеся при этом переходные процессы при пуске от ЗИ на холостом ходу и под нагрузкой представлены на рис.5.53.
а)
207

б)
Рис.5.53. Пуск от ЗИ в однократноинтегрирующей системе на холостом ходу (а) и под нагрузкой (б)
На рис.5.53,а пуск электропривода осуществляется без нагрузки (на холостом ходу), при этом установившаяся величина uот (якорного
тока) определяется постоянной величиной ошибки на входе РС ∆uс .
После точки а выходное напряжение ЗИ перестает линейно возрастать, а скорость электродвигателя продолжает увеличиваться, поэтому начинает уменьшаться ошибка на входе РС, что вызывает уменьшение величины якорного тока.
Поскольку момент нагрузки на валу электродвигателя отсутствует, то электродвигатель разгонится до скорости идеального холостого хода
( ω = ω0з ), поэтому ошибка на входе РС после завершения этапа пуска
будет равна нулю ( ∆uс = uзс − uос = 0), что и определяет нулевой ток в якорной цепи в установившемся режиме.
Переходные процессы при пуске под нагрузкой ( Iс = Iн )
отличаются тем, что увеличивается ошибка регулирования на входе РС (рис.5.53,б) вызывая увеличение якорного тока на величину статического тока, что обеспечивает пуск с заданным ускорением (заданным динамическим током). В этом случае электродвигатель разгоняется до скорости, меньшей скорости идеального холостого хода, следовательно, в установившемся режиме работы на входе РС будет существовать
208
отличная от нуля ошибка регулирования скорости ∆uс = uзс − uос ≠ 0 ,
пропорциональная величине статической просадке скорости, поэтому на выходе РС будет сформировано напряжение задания тока якоря,
пропорциональное величине тока нагрузки uзт = kотIc , и в якорной цепи будет протекать ток Ia = Ic = Iн .
На рис.5.54 показаны переходные процессы пуска в однократноинтегрирующей системе регулирования от ЗИ, обеспечивающего
величину динамического тока |
Iдин =1,2Iн . На рис.5.54,а |
пуск |
электродвигателя начинается |
в режиме холостого хода, |
когда |
Ia = Iдин =1,2Iн . Появление нагрузки Iс = Iн на валу электродвигателя
на этапе его разгона, приводит к тому, что электродвигатель не может разгоняться с прежним заданным ускорением, т.к. теперь величина
динамического тока (момента) будет равна Iдин =1,2Iн − Iн = 0,2Iн , поэтому электродвигатель продолжает разгон с меньшим ускорением, что вызовет увеличение ошибки на входе РС ∆uс и, следовательно,
увеличение выходного напряжения РС и увеличение якорного тока. Увеличение якорного тока будет происходить до тех пор, пока не будет обеспечено заданное ускорение электродвигателя, т.е. пока ток якоря не
станет равным Ia = Iдин + Ic =1,2Iн + Iн = 2,2Iн . В дальнейшем
электродвигатель продолжит разгон с заданным ускорением до установившейся скорости, соответствующей величине нагрузки на валу электродвигателя.
209
а)
б)
Рис.5.54. Пуск от ЗИ в однократноинтегрирующей системе с Iдин=1,2Iн при набросе нагрузки Iс=Iн (а) и Iс=1,6Iн (б)
Приложение нагрузки на этапе разгона электродвигателя
Iс =1,6Iн |
(рис.5.54,б) также вызывает увеличение ошибки |
регулирования на входе РС ∆uс и увеличение якорного тока. Однако в
отличие от предыдущего случая (рис.5.54,а) увеличение тока будет происходить до тех пор, пока РС не зайдет в ограничение.
210
При этом на выходе РС будет сформировано максимальное задание якорного тока uзтmax = 10В, в якорной цепи будет протекать
максимальный ток Ia = 2,5Iн , и электродвигатель будет разгоняться с
ускорением, меньше заданного, т.к. величина динамического тока будет меньше требуемой: Iдин = Ia − Ic = 2,5Iн −1,6Iн = 0,9Iн . Как только РС
заходит в ограничение, происходит размыкание контура регулирования скорости, поэтому увеличение ошибки ∆uс на входе РС не приводит к
увеличению якорного тока. Замыкание контура регулирования скорости происходит тогда, когда РС выходит из зоны ограничения на линейный участок характеристики (рис.5.26), что вызывает уменьшение якорного
тока до величины Ia = Iс =1,6Iн , определяемой величиной ошибки на входе РС в установившемся режиме.
Таким образом, если РС не находится в ограничении, т.е. система регулирования линейная, пуск электродвигателя будет происходить с заданным ускорением, определяемым темпом изменения выходного
напряжения ЗИ U0 / TЗИ , как на холостом ходу, так и под нагрузкой.
Контрольные вопросы:
1.Как выполняется ограничение регулируемой координаты в СПРК с помощью блока ограничения?
2.Какой основной недостаток присущ данному способу ограничения?
3.Какие элементы входят в состав задатчика интенсивности? Поясните работу ЗИ, его основные режимы работы.
4.Что определяет темп изменения выходного напряжения ЗИ?
5.Как правильно рассчитать постоянную времени ЗИ для обеспечения требуемого ускорения электропривода?
6.Чем определяется величина динамического тока электропривода?
7.Чем определяется установившаяся скорость при пуске от ЗИ?
8.Как формируется необходимая величина динамического тока?
9.Как получить уравнения переходных процессов тока и скорости при работе от ЗИ?
10.Почему при пуске от ЗИ заданное ускорение обеспечивается как на холостом ходу, так и под нагрузкой? Какое условие при этом должно выполняться?
211

5.4.1.2 Формирование требуемого ускорения в двукратноинтегрирующей системе регулирования
Структурная схема двукратно – интегрирующей системы регулирования с включенным на входе ЗИ, представлена на рис.5.55.
|
|
|
|
|
|
РЭл |
|
И |
ЗКC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
uз |
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
uзс |
|
|
|
|
|
|
|
ω |
|
|
Ia |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
(8Tµp +1) / kос |
|
|
|
|
Тмр |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тзи р |
|
|
|
|
8Tµp(4Tµp(2Tµp(Тµр +1) +1) +1) +1 |
|
|
|
|
|
Rэ / с |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
U0 |
|
|
|
И |
uзс |
|
|
|
|
|
|
|
|
|
ЗКC |
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
(8T p +1) / k |
ос |
|
|
|
Тмр |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
Тзи р |
|
|
|
|
|
|
8Tµp(4Tµp(2Tµp(Тµр +1) +1) +1) +1 |
|
|
|
Rэ / с |
|
|
|
|
|
б) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.55. Структурная схема двукратно – интегрирующей СУЭП с ЗИ
На рис.5.55,а показана структурная схема двукратно – интегрирующей системы регулирования с задатчиком интенсивности на входе замкнутого контура регулирования скорости (ЗКС) без учета фильтра на входе РС, поэтому в передаточной функции контура
регулирования скорости присутствует форсирующее звено (8Tµp +1) . На рис.5.55,б показана структурная схема, соответствующая линейному изменению выходного напряжения ЗИ uзс , когда обратная связь по
выходному напряжению ЗИ не влияет на работу релейного элемента Рэл. В этом случае передаточная функция, связывающая выходную
координату Ia (p) с входной координатой U0 (p) примет вид:
W |
(p) = |
I |
|
(p) |
= |
T |
|
с |
|
8Tµp +1 |
|
a |
|
м |
|
|
|
|
|||
1 |
|
U0 (p) |
|
Tзи Rэkос 8Tµp(4Tµp(2Tµp(Tµp +1) +1) +1) +1 |
||||||
|
|
|
||||||||
,
откуда можно получить следующее выражение:
212

Ia (p) = |
U |
(p) |
T с |
( |
8Tµ |
p + |
1 |
), |
|
0 |
|
м |
|
|
(5.53) |
||||
|
Rэkос |
Q4 (p) |
Q4 (p) |
||||||
|
Tзи |
|
|
|
|
||||
где Q4 (p) - оптимальный полином четвертого порядка.
Как видно из (5.53) переходный процесс тока якоря при пуске от ЗИ определяется полиномом Q4 (p) и соответствующей ему переходной
функцией h4 (τ) и ее первой производной h4/ (τ) , поэтому после
преобразований можно получить уравнение переходного процесса тока якоря при пуске от ЗИ:
Ia (τ) = U0 Tмс (1−e−2τ((1+ 6τ)cos(2τ) + 2(τ−1)sin(2τ))),
Tзи Rэkос
(5.54)
где τ = t /8Tµ - относительное время.
Установившееся значение величины якорного тока соответствует необходимой величине динамического тока и, аналогично (5.49), определяется следующей зависимостью:
Ia уст = |
U0 |
Tмс |
= Iaдин |
(5.55) |
|
||||
|
Tзи |
Rэkос |
|
|
Переходный процесс для скорости электродвигателя при пуске от ЗИ получается путем интегрирования выражения (5.54):
|
R |
/ с τ |
U |
|
8Tµ |
|
− |
τ |
|
|
ω(τ) = |
Tэ |
∫Ia (τ)dτ = |
|
0 |
|
|
(τ−e |
2 |
|
((1,5 + τ)sin(2τ) − |
T |
k |
|
|
|
||||||
|
м 0 |
зи |
|
oc |
|
|
|
|
||
− 2τcos(2τ))).
(5.56)
В установившемся режиме скорость электродвигателя будет изменяться линейно с заданным темпом:
213
ωуст (τ) = |
U |
0 |
|
8Tµ |
τ, |
(5.57) |
|
|
|
koc |
|||||
|
Tзи |
|
|
||||
если в выражение (5.57) подставить значение относительного |
|||||||
времени τ = t /8Tµ , |
то получится уравнение переходного процесса |
||||||
скорости электродвигателя ωуст (t) : |
|
||||||
ωуст (t) = |
U0 |
|
1 |
t. |
(5.58) |
||
|
|
||||||
|
Tзи koc |
|
|
||||
Как видно из выражений (5.55-5.58) величина динамического тока и изменение скорости во времени определяются настройкой ЗИ, т.е.
величиной отношения U0 / Tзи . Чем больше будет величина отношения
U0 / Tзи , тем больше будет величина динамического тока и, соответственно, больше ускорение электродвигателя.
Пример 14. Для двукратно – интегрирующей системы регулирования с параметрами, рассчитанными в примерах 5,11 и 13, определить динамические свойства при пуске от ЗИ, обеспечивающего величину динамического тока Iдин = 1,2*Iн. Для получения модели двукратно – интегрирующей системы управления, в схему РС на рис. 5.50 необходимо добавить звено с передаточной функцией (8Tμp+1)/(8Tμp). Рассмотрим результаты моделирования переходных процессов двукратно
– интегрирующей системы управления без дополнительного фильтра на входе РС.
На рис.5.56,а представлены переходные процессы напряжений на выходе ЗИ (на входе РС) uзс , обратной связи по скорости uос и току
uот и ошибки на входе ПИ – РС ∆uс = uзс − uос при пуске от ЗИ в режиме холостого хода на начальном этапе пуска. Напряжение обратной
связи по скорости uос , пропорциональное скорости вращения электродвигателя, изменяется в соответствии с выражением (5.56). ПИ – РС сводит ошибку регулирования скорости ∆uс = uзс − uос к нулю, за
214
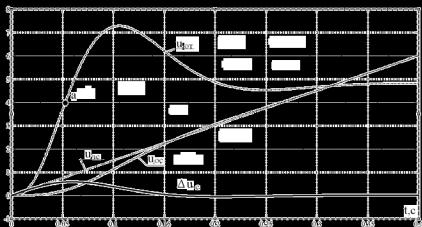
это время на выходе РС формируется задание величины якорного тока
uзт = kотIa дин .
На рис.5.56,б приведены переходные процессы напряжений: ошибки на входе ПИ – РС ∆uс = uзс − uос , составляющие выходного
напряжения РС – |
пропорциональная uп = kрс∆uс , |
интегральная |
||
uи = |
1 |
∫∆ucdt и |
их сумма uвыхРС = uзт = uп + uи . |
Как видно из |
T |
||||
|
рс |
|
|
|
переходных процессов на рис.5.56,б, после затухания переходных составляющих, на выходе РС устанавливается величина напряжения,
которую «наинтегрировал» РС uзт = uи , сводя ошибку регулирования скорости ∆uс = uзс − uос к нулю. Следовательно, величина напряжения
uзт (величина якорного тока) определяется величиной ошибки ∆uс , которую интегрирует РС.
а)
215

б)
Рис.5.56. Переходные процессы начального участка пуска от ЗИ в двукратно –интегрирующей системе управления
Если uзс будет изменяться с большим темпом, то больше станет ошибка ∆uс на входе РС и, следовательно, станет больше величина
выходного напряжения РС
тока электродвигателя, ускорению.
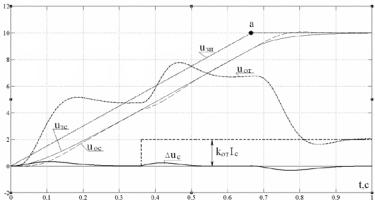
На рис.5.57 показаны переходные процессы при пуске до максимальной скорости вращения ( u =10В) на холостом ходу в двукратно – интегрирующей системе. На установившемся участке пуска, когда ошибка регулирования на входе РС сведена к нулю ∆uс = 0 ,
выходное напряжение РС остается неизменным и равным uзт = kотIa дин , что определяет постоянство заданного ускорения электродвигателя.
В момент времени, соответствующий т. a на рис.5.57, выходное напряжение ЗИ uзс прекращает линейно изменяться во времени.
Поскольку на входе РС ничего не изменилось, то электродвигатель продолжает разгон, что приводит к появлению перерегулирования в
скорости, т.е. uос становится больше uзс , и появлению отрицательной
216
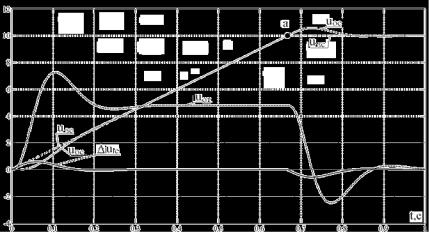
ошибки на входе РС ∆uс = uзс − uос < 0 , вследствие чего выходное напряжение РС начинает уменьшаться, следовательно, начинает уменьшаться и величина якорного тока (напряжение uот ).
Рис.5.57. Переходные процессы при пуске от ЗИ в двукратно – интегрирующей СУЭП в режиме холостого хода
ПИ регулятор скорости сводит ошибку регулирования скорости ∆uс = uзс − uос < 0 к нулю, что приводит к снижению величины
якорного тока до нуля (площади, ограниченные ∆uс и осью времени,
для положительной ∆uс > 0 и отрицательной ∆uс < 0 ошибок на
рис.5.57 равны между собой, следовательно, сумма этих площадей равна нулю, что и определяет равенство нулю выходного напряжения ПИ – РС, т.е. равенство нулю величины якорного тока на заданной установившейся скорости вращения электродвигателя).
На рис.5.58 представлены переходные процессы при пуске от ЗИ до максимальной скорости вращения ( uзсmax =10В) в двукратно –
интегрирующей СУЭП под нагрузкой ( Iс = 0,5Iн ). Наличие момента нагрузки на валу электродвигателя приводит к появлению времени задержки tЗ , когда электродвигатель остается в неподвижном состоянии пока момент, развиваемый электродвигателем меньше момента
217
сопротивления на его валу. В этом случае на входе РС присутствует только выходное напряжение ЗИ uзс , в то время как напряжение
обратной связи по скорости равно нулю ( uос = 0). Поэтому ошибка
∆uс на входе ПИ РС будет больше, чем при пуске на холостом ходу, что вызывает увеличение значения установившегося якорного тока на величину Iс = 0,5Iн , следовательно, установившееся значение якорного
тока |
электродвигателя |
будет |
равно |
Ia уст |
= Ia дин + Iс =1,2Iн + 0,5Iн =1,7Iн . |
Электродвигатель разгоняется |
|
под |
действием заданного динамического |
тока Ia дин =1,2Iн , |
поэтому |
выход на установившуюся скорость будет происходить так же, как и на рис.5.57 с таким же перерегулированием в скорости, в результате чего
отрицательная ошибка на входе ПИ РС ∆uс < 0 , «сбросит» на выходе
РС |
напряжение |
задания |
тока, задающее величину динамического |
||||
тока uзт = kотIa дин , |
а |
на |
выходе РС останется напряжение задания |
||||
статического тока |
uзт |
= kотIс . Электродвигатель |
будет работать с |
||||
заданной максимальной |
установившейся скоростью |
вращения |
|||||
uзс |
= uос =10В, |
развивая |
требуемую величину |
момента |
на валу |
||
( Ia |
= Ic ). |
|
|
|
|
|
|
Рис.5.58. Переходные процессы при пуске от ЗИ под нагрузкой в двукратно –интегрирующей СУЭП
218
На рис.5.59 показаны сравнительные переходные процессы при пуске от ЗИ до максимальной скорости в двукратно – интегрирующей системе на холостом ходу (обозначения переменных без штрихов) и под нагрузкой (обозначения переменных со штрихами). Из рис.5.59 видно, что на начальном этапе пуска ошибка регулирования скорости при работе
под нагрузкой ∆uс/ больше ошибки регулирования скорости на
холостом ходу ∆uс за счет того, что электродвигатель остается неподвижным пока момент электродвигателя меньше момента нагрузки
на его валу и, |
следовательно, на этом этапе пуска электродвигателя |
uос =0, а ∆uс/ |
= uзс −0 > ∆uc = uзс − uос . Т.к. величина времени |
задержки начала вращения электродвигателя пропорциональна величине момента нагрузки на валу, то за время задержки на выходе ПИ РС будет сформировано задание величины якорного тока, пропорциональное
величине статического тока (для нашего примера Iс = 0,5Iн ).
Поскольку величина ошибки регулирования скорости ∆uc формирует на выходе ПИ РС величину заданного динамического тока (для нашего случая Ia дин =1,2Iн ), то величина ошибки регулирования
скорости ∆uс/ , сформирует на выходе РС напряжение задания
величины якорного тока, равное uзт = kот (Ia дин + Iс ) , что определит
для нашего примера установившееся значение якорного тока на уровне
Ia уст = Ia дин + Iс = =1,2Iн + 0,5Iн =1,7Iн .
219

Рис.5.59. Сравнительные переходные процессы при пуске от ЗИ в двукратно –интегрирующей СУЭП
Разгон электродвигателя происходит с заданной величиной динамического тока до т. a на рис.5.59, после чего прекращается
линейное изменение выходного напряжения ЗИ uзс и происходит выход
на заданную максимальную скорость вращения электродвигателя с перерегулированием по скорости, в результате чего формируется
отрицательная ошибка регулирования скорости ∆uc = ∆uс/ < 0 ,
«сбрасывающая» с выхода ПИ РС величину заданного динамического тока. Поэтому в режиме холостого хода выходное напряжение РС по
завершении пуска будет равно нулю - uзт = 0 , а при разгоне под
нагрузкой – выходное напряжение РС будет задавать необходимую величину якорного тока, соответствующую величине тока нагрузки -
uзт/ = kотIс .
Рассмотрим двукратно – интегрирующую систему регулирования, когда на входе ПИ РС в цепи задания установлен дополнительный
фильтр |
с передаточной функцией |
W (p) = |
1 |
(8Tµp +1) |
. В этом |
|
|
дф |
|
|
|
|
|
|
|
|
|
случае |
происходит компенсация |
влияния |
форсирующего звена |
||
(8Tµp +1) в числителе передаточной функции Wзкс (p) и в структурной
220
схеме рис.5.55,б передаточная функция замкнутого контура регулирования скорости будет представлена следующим уравнением:
Wзкс (p) = |
ω(p) |
= |
|
|
|
|
1/ kос |
|
|
, |
|||
uзс (p) |
8Tµp(4Tµp(2Tµp(Tµp +1) +1) |
+1) |
+1 |
||||||||||
|
|
|
|
||||||||||
тогда выражение (5.53) примет вид: |
|
|
|
|
|||||||||
Ia (p) = |
U0 (p) |
Tмс |
1 |
, |
(5.59) |
|
|
|
|||||
Rэkос |
|
Q4 (p) |
|
|
|
||||||||
|
Tзи |
|
|
|
|
|
|
||||||
где Q4 (p) - оптимальный полином четвертого порядка, который на
основании таблицы 1 определяет оптимальный переходный процесс якорного тока с перерегулированием σ = 6,2% и временем нарастания
14,4 Tµ .
Для анализа динамических свойств двукратно – интегрирующей системы управления при пуске от ЗИ с дополнительным фильтром в схему модели на рис.5.50 необходимо включить на входе РС звено с
передаточной функцией 1(8Tµp +1) . В этом случае выходное
напряжение ЗИ поступает на вход фильтра, на выходе которого формируется напряжение задания скорости uзс , подаваемое на вход ПИ
РС. На рис.5.60 представлены результаты моделирования при пуске от ЗИ в режиме холостого хода (рис.5.60,а) и под нагрузкой (рис.5.60,б).
Как видно из рис.5.60 выходное напряжение ЗИ uзи , подаваемое на вход фильтра, изменяется линейно с заданным темпом; напряжение на выходе дополнительного фильтра uзс изменяется с тем же темпом, что и
напряжение uзи , но с запаздыванием, определяемым величиной постоянной времени фильтра 8Tµ . На входе РС формируется ошибка регулирования скорости ∆uc , но в отличие от рис.5.57, теперь напряжение обратной связи по скорости uос сравнивается на входе РС с
выходным напряжением фильтра uзс , а не ЗИ, поэтому и происходит снижение перерегулирования в токе.
221

а)
б)
Рис.5.60. Переходные процессы при пуске от ЗИ в двукратно – интегрирующей СУЭП с дополнительным фильтром на входе РС
На рис.5.60,б представлены переходные процессы пуска от ЗИ под нагрузкой ( Ic = 0,5Iн ), при этом появляется время задержки tЗ , в
течение которого формируется величина задания статического тока, при этом увеличивается перерегулирование в якорном токе. Установившееся значение якорного тока обеспечивает заданное ускорение, формируемое
222
ЗИ, и составляет Ia уст = Ia дин + Iс = 1,2Iн + 0,5Iн =1,7Iн . Поскольку
пуск электродвигателя происходит с тем же ускорением, что и на холостом ходу, то выход на заданную установившуюся скорость происходит так же, как и на рис.5.60,а, при этом формируется такая же
ошибка регулировании скорости ∆uc , которая снимает заданную
величину динамического тока, поэтому установившееся значение якорного тока после окончания пуска будет соответствовать величине
момента нагрузки на валу Ia уст = Iс = 0,5Iн .
На рис.5.61 показана реакция двукратно – интегрирующей СУЭП на скачкообразное приложение момента нагрузки во время пуска от ЗИ. При появления момента сопротивления на валу электродвигателя
( Iс = 0,5Iн ) электродвигатель не может продолжать разгон с заданным ускорением, поэтому напряжение обратной связи по скорости uос начинает отклоняться от напряжения uзс , что приводит к появлению ошибки ∆u c > 0 на входе РС и возрастанию величины якорного тока.
Рис.5.61. Переходные процессы при набросе нагрузки в режиме пуска от ЗИ
Поскольку возмущающее воздействие ( Iс ) проходит через РС с форсирующей составляющей (8Tµp +1) (см. структурную схему на рис.5.43), то возрастает перерегулирование в якорном токе (σ > 6,2%).
223
Увеличение якорного тока произойдет на величину статического тока для обеспечения заданного ускорения электродвигателя. Выход на заданную установившуюся скорость вращения происходит так же, как на рис.5.60,б, с тем же перерегулированием в скорости и той же ошибкой
∆uc < 0 , которая «сбрасывает» величину динамического тока, оставляя на выходе РС задание величины тока нагрузки Ia уст = Iс = 0,5Iн .
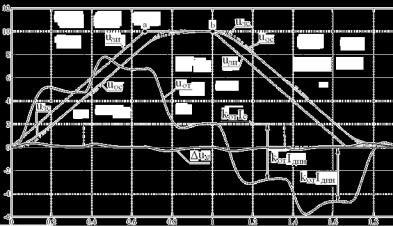
На рис.5.62 представлены переходные процессы при работе по трапецеидальной тахограмме при приложении нагрузки на этапе разгона и снятии нагрузки на этапе торможения.
Рис.5.65. Работа по трапецеидальной тахограмме с ЗИ
Разгон и выход на заданную установившуюся скорость вращения происходит аналогично рис.5.61. В т. b напряжение задания на входе ЗИ
скачком снижается до нуля, поэтому выходное напряжение ЗИ uзи начинает снижаться с заданным темпом. Выходное напряжение фильтра
uзс |
на входе РС также начинает уменьшаться с тем же самым темпом, |
|
что |
и uзи , |
но с запаздыванием 8Tµ . Уменьшение напряжения |
uзс приводит |
к появлению отрицательной ошибки регулирования |
|
∆uc < 0 (т.к. |
напряжение uос запаздывает относительно uзс ) на входе |
|
РС, что вызывает уменьшение величины якорного тока. Электродвигатель переходит в режим рекуперативного торможения с
224