


Контрольные вопросы:
1.В каких случаях применяют двухконтурное регулирование якорного тока?
2.Исходя из каких условий настраивается внутренний контур регулирования якорного тока?
3.Как определить коэффициент усиления внутреннего регулятора
тока?
4.Как правильно рассчитать минимальную постоянную времени двухконтурного регулирования?
5.Как определить передаточную функцию внешнего регулятора
тока?
6.С какой целью применяют двухконтурное регулирование якорного тока?
7.Объясните, как происходит адаптация данного регулятора к режиму прерывистых токов?
8.Поясните принцип «предуправления» на примере рис.5.24,в.
5.2 Настройка контура регулирования скорости вращения электропривода
После настройки внутреннего контура регулирования тока якоря выполняется настройка внешнего конура регулирования скорости вращения электродвигателя.
Для регулирования скорости вращения электродвигателя необходимо сформировать на его валу необходимый момент. Эту задачу выполняет регулятор скорости (РС). Выходное напряжение РС поступает на вход подчиненного ему регулятора тока, формируя необходимую величину тока, а, следовательно, при неизменной величине магнитного потока и пропорционального току момента.
В контур регулирования скорости входят: регулятор скорости, передаточную функцию которого необходимо определить, внутренний замкнутый контур регулирования якорного тока ЗТК, объект регулирования (электромеханический преобразователь), цепь отрицательной обратной связи по скорости (тахогенератор, делитель напряжения, датчик напряжения). Структурная схема контура регулирования скорости вращения электродвигателя представлена на рис. 5.25.
159

uзс |
|
|
|
|
РС |
|
u |
|
|
|
|
|
ЗТК |
Ia |
|
|
ЭМП |
ω |
|||||
|
|
∆uс |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
зт |
|
|
|
|
1/ kот |
|
|
|
Rэ |
/ с |
||||||||
|
|
W |
(p) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
рс |
|
|
|
|
|
|
2Tµp(Тµр +1) +1 |
|
|
|
Тмр |
|
|
|
||||
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
ТГ + Дел + ДН |
|
i = 2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис.5.25. Структурная схема контура регулирования скорости вращения электродвигателя
Коэффициент пропорциональности между величиной действительной скорости вращения и напряжением обратной связи по скорости (или напряжением задания величины скорости) называется
коэффициентом обратной связи по скорости koс и рассчитывается по формуле:
kоc = uзсmax = uосmax = |
(8 -10)В |
, |
|
ω |
ω |
ω |
|
max |
max |
max |
|
где ωmax - максимальная скорость вращения электродвигателя, определяемая из технологических требований к электроприводу.
Для настройки контура регулирования на МО передаточная функция регулятора скорости (РС) в соответствии с (5.11) для
i = 2 определится:
W (p) = |
1 |
|
Tмp |
kот |
= |
Tм |
|
c |
kот |
= k |
|
. (5.26) |
|||||
рс |
22 T p R |
э |
/ с k |
ос |
|
4T |
|
R |
э |
k |
ос |
|
рс |
|
|||
|
µ |
|
|
|
|
|
µ |
|
|
|
|
|
|
||||
Как видно из последнего выражения регулятор скорости имеет структуру пропорционального регулятора (П – РС) с коэффициентом
передачи kрс . Поскольку выходное напряжение РС является задающим напряжением для контура регулирования тока, то для ограничения
160
якорного тока максимально допустимой величиной, необходимо принимать меры для ограничения выходного напряжения РС на
уровне uвыхРСmax = uзтmax . Поэтому характеристика вход – выход РС должна иметь вид, представленный на рис.5.26,
+uзтmax |
uвыхРС |
= uзт |
h2 h1 h |
|
|
a h3 |
|||
|
b |
|
зсmax |
|
|
с |
|
= u |
|
|
|
c |
||
|
|
∆u |
||
d |
|
|
||
|
|
|
||
0 |
cс cb |
ca |
∆uc = uзс −uос |
|
∆u ∆u ∆u |
||||
|
|
|||
|
−uзтmax |
|
|
|
Рис.5.26. Характеристика регулятора скорости |
||||
где ∆uс - ошибка регулирования на входе РС (разность между
напряжениями задания скорости uзс и обратной связи по скорости uос ).
На характеристике РС точка а соответствует переходу с линейного участка характеристики РС в режим ограничения (насыщения).
Для статического режима работы (при токе якоря равном статическому Ia =Iс ) можно записать следующее уравнение для ошибки регулирования якорного тока:
∆uт = uзт − uот = uзт − kотIс = 0 . |
(5.27) |
161

А так как напряжение задания величины якорного тока uзт
является выходным напряжением РС, то уравнение (5.27) можно представить в следующем виде:
(uзс − uос )kрс − kотIс = (uзс − kосω)kрс − kотIс = 0 . (5.28)
Если в выражение (5.28) подставить значение коэффициента передачи kрс из (5.26) и решить уравнение относительно скорости
вращения электродвигателя ω, то получим выражение электромеханической ω = f(Ia) (механической ω = f(М)) характеристики электродвигателя в системе регулирования с П – РС и ПИ – РТ:
ω = |
|
|
u |
зс |
|
− I |
с |
R |
э |
4Tµ |
|
= |
|
u |
зс |
|
− ∆ω |
|
4Tµ |
= ω |
− ∆ω , |
(5.29) |
|||||||||
|
|
|
k |
ос |
|
|
|
c |
|
T |
|
|
k |
ос |
раз T |
0з |
|
сз |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
м |
|
|
|
|
|||||||
где ω |
= |
uзс |
- |
|
скорость |
идеального |
холостого |
хода |
в |
СУЭП |
|||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||
0з |
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
подчиненного регулирования с П – РС и ПИ – РТ, с-1; |
|
|
|
||||||||||||||||||||||||||||
|
∆ω |
раз |
= I |
с |
|
Rэ |
|
= М |
с |
|
Rэ |
- статическая просадка скорости в |
|||||||||||||||||||
|
|
|
с |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с2 |
|
|
|
|
|
|
|||||||||
разомкнутой системе регулирования, с-1; |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
∆ω |
|
|
= ∆ω |
|
|
4Tµ |
|
|
|
- статическая |
просадка |
скорости в |
||||||||||||||||||
|
|
|
|
|
|
сз |
|
|
|
|
|
раз |
|
|
|
|
Tм |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
замкнутой системе регулирования с П – РС и ПИ - РТ, с-1. |
|
|
|||||||||||||||||||||||||||||
Как |
|
видно |
из |
(5.29) |
|
величина напряжения на |
входе |
РС uзс |
|||||||||||||||||||||||
(управляющее воздействие) задает только скорость идеального холостого
хода |
электродвигателя |
ω |
= |
uзс |
, |
(единственную |
точку |
|
|||||||
|
|
0з |
|
kос |
|
|
|
|
|
|
|
|
|
||
электромеханической характеристики), поэтому в режиме идеального холостого хода (Ic=0) СУЭП всегда будет отрабатывать заданное значение скорости идеального холостого хода с нулевой ошибкой, т.е. система с П – РС и ПИ – РТ является астатической по заданию (по управляющей величине). При приложении возмущающего воздействия (момента нагрузки на вал электродвигателя) скорость вращения
162
электродвигателя будет отлична от скорости идеального холостого хода ω0з на величину статической просадки скорости ∆ωсз , пропорционально зависящей от величины момента Мс (тока Ic) нагрузки, т.е. отработка заданной величиной uзс скорости вращения будет
осуществляться с ошибкой. Поэтому система с П – РС и ПИ – РТ является статической по возмущению. Система подчиненного регулирования с П – РС и ПИ – РТ получила название однократно-
интегрирующей системы регулирования (или просто однократной).
На рис.5.27 представлены электромеханические (механические) характеристики электродвигателя в однократноинтегрирующей системе регулирования для различных значений величины напряжения задания
скорости на |
входе РС |
uзс = 0 , uзс = 0.5uзсmax и uзс = uзсmax , |
||
задающих |
скорости |
идеального |
холостого |
хода |
ω0з = 0 , ω0з = 0.5ω0 max |
и ω0з = ω0 max , |
соответственно, |
с учетом |
|
ограничения максимальной величины якорного тока.
Рассмотрим работу данной системы регулирования в статических режимах на примере характеристик рис.5.26 и рис.5.27.
Предположим, что на вход РС в режиме идеального холостого хода (Мс=0 или Ic=0) подано максимальное значение напряжения задания
скорости |
uзс = uзсmax , поэтому электродвигатель будет |
вращаться с |
||
заданной |
максимальной |
скоростью ω = ω0з = ω0max |
в |
точке |
d характеристики рис.5.27 при моменте (токе) равном нулю. Так как скорость вращения электродвигателя равна заданной, т.е. ω = ω0max , поэтому напряжение в цепи обратной связи по скорости вращения будет
равно uос = kосω0 max = uосmax = uзсmax |
и, следовательно, ошибка по |
||
скорости |
на |
входе РС будет равна нулю: ∆uс = uзсmax − uосmax = 0 . |
|
Поэтому |
и |
выходное напряжение |
РС будет равно нулю: |
uвыхРС = uзт = kрс∆uс = 0 , а так как это напряжение задает
необходимую величину якорного тока, то контур регулирования якорного тока будет поддерживать нулевой заданный ток.
163

ω0max |
ω |
∆ωсз1 |
∆ωсз 2 |
|
|
|
|
d |
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
с |
b |
a |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0.5ω |
|
|
|
|
|
|
uзс = uзсmax |
0max |
|
|
|
|
|
|
|
|
|
|
|
|
|
uзс = 0.5uзсmax |
|
0 |
|
|
Ic1(Мс1) |
Ic2 (Мс2 ) |
|
h |
Ia (M) |
|
|
|
uзс = 0 |
|
Imax (Мmax ) |
||
Рис.5.27. Электромеханические (механические) характеристики в |
|||||||
|
|
однократной системе регулирования |
|
|
|||
Если на валу электродвигателя появится момент нагрузки (Мс1 на рис.5.27), то под действием отрицательного динамического момента (Мдин =0-Мс1) скорость вращения электродвигателя начнет снижаться. В этом случае на входе РС возникает отличная от нуля ошибка
регулирования ∆uс = uзсmax − uос = uзсmax − kосω > 0 , соответственно увеличивается и выходное напряжение РС, т.е. увеличивается
напряжение задания величины якорного тока uзт = kрс∆uс > 0 , а,
следовательно, и ток якоря (момент) электродвигателя. Снижение скорости электродвигателя будет происходить до тех пор, пока динамический момент на валу электродвигателя Мдин =М - Мс1 не станет равен нулю, т.е. пока момент, развиваемый электродвигателем, не станет равен моменту сопротивления на валу (М=Мс1 или Ia=Ic1). Это условие будет выполнено в т. с механической характеристики рис.5.27 при этом на входе РС будет действовать ошибка регулирования скорости,
пропорциональная величине статической просадки скорости ∆ωсз1 при
величине |
якорного |
тока |
Ia=Ic1: |
∆uсс = uзсmax − kосω = kос (ω0 max −ω) = kос∆ωсз1 . |
Этой входной |
||
|
|
164 |
|
ошибке |
будет |
соответствовать |
выходное |
напряжение |
РС, равное: |
||||||||||||||||||||||||
u |
|
= k |
|
∆u |
|
= k |
|
k |
|
∆ω |
|
= |
T |
|
с |
k |
|
k |
|
I |
R |
|
4Tµ |
|
= k |
|
I |
|
|
зт |
рс |
cc |
рс |
ос |
сз1 |
м |
|
|
|
|
от |
ос |
с1 с |
э |
|
|
от |
c1 |
|||||||||||
4T |
|
R |
э |
k |
T |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
ос |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
||
(т. с на характеристике регулятора скорости рис.5.26), поэтому регулятор тока якоря будет поддерживать в якорной цепи заданное значение тока
якоря uзт = kотIc1 , т.е. стабилизировать ток на уровне Ia=Ic1.
Электродвигатель будет работать в установившемся режиме в т с механической характеристики рис.5.27.
При возрастании момента нагрузки до величины Мс2 произойдет снижение скорости, увеличится статическая просадка скорости до
величины ∆ωсз2 , соответственно, увеличится выходное напряжение РС, увеличится ток в якорной цепи до величины Ia=Ic2 и электродвигатель
перейдет в новую точку установившегося режима работы (т. b на механической характеристике рис.5.27 и характеристике РС на рис.5.26).
Если момент нагрузки на валу электродвигателя превысит величину Мmax, то скорость электродвигателя будет снижаться, ошибка на входе РС будет увеличиваться, следовательно, будет увеличиваться и выходное напряжение РС и ток якоря, до тех пор, пока РС работает на
линейном участке своей характеристики от т. d до т. a рис.5.26. В т. a характеристики РС происходит ограничение выходного напряжения
РС на уровне uзтmax , поэтому дальнейшее увеличение якорного тока
происходить не будет и РТ будет поддерживать в якорной цепи ток Ia = Imax. Под действием момента нагрузки, превышающего максимальный момент электродвигателя, электродвигатель остановится, при этом
uос = 0, на входе б удет максимальная ошибка регулирования скорости ∆uс = uзсmax электродвигатель будет работать в установившемся
режиме работы (т. h на механической характеристике рис.5.27 и т. h на характеристике РС рис.5.26), развивая максимальный момент в неподвижном состоянии.
Рассмотрим реализацию РС на операционном усилителе. Принципиальная электрическая схема РС на аналоговом операционном усилителе показана на рис.5.28. На вход РС (например, для работы в направлении «вперед») подаются напряжение задания скорости
uзс положительной полярности и напряжение обратной связи по
скорости uос отрицательной полярности для обеспечения отрицательной обратной связи, при такой полярности входных напряжений на выходе
165
РС получается напряжение |
задания величины тока якоря |
|||||||||||||
uзт отрицательной полярности. |
|
|
|
|
|
|
|
|
|
|
|
|
||
+ uзс |
R4 |
|
|
БО |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
R |
|
6 |
|
|
|
|
|
|
|
||
−uос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R5 |
|
|
|
|
|
|
|
|
|
|
|
−uзт |
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.28. Принципиальная схема РС
Для обеспечения одинакового коэффициента передачи РС по цепям задания и обратной связи (однозначного соответствия между
напряжениями uзс и uос ) величины сопротивлений входных резисторов
принимаются одинаковыми R4 = R5 . Коэффициент усиления РС определяется отношением величины сопротивления резистора в цепи
обратной связи к величине |
сопротивления |
входного резистора, т.е. |
kрс = R6 / R5 = R6 / R4 . В |
цепи обратной |
связи РС включен блок |
ограничения БО выходного напряжения РС, имеющий зону
нечувствительности, ограниченную « − uзтmax » - « + uзтmax », для обеспечения характеристики РС, показанной на рис.5.26.
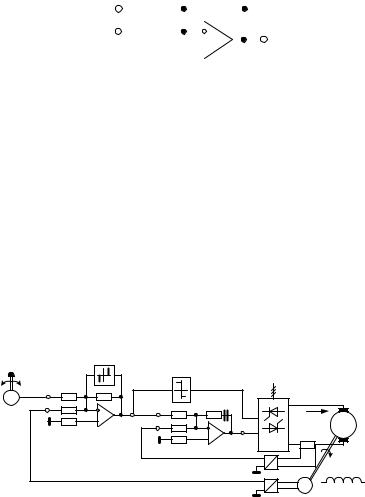
Принципиальная электрическая схема однократноинтегрирующей системы регулирования, реализованной на аналоговых операционных усилителях, представлена на рис.5.29.
|
БО |
|
|
|
|
|
|
+uзс R4 |
РЭл |
|
|
|
|
|
|
R6 |
|
|
|
|
|
|
|
КА −uос R5 |
−uзт |
R1 |
R3 C1 |
+ Uлпу |
Ia |
|
|
|
+uот |
R2 |
|
|
|
||
|
|
+ Uу |
|
|
М |
||
|
РС |
|
|
RS |
|
||
|
|
|
|
|
|
||
|
|
|
РТ |
ТП |
|
|
|
|
|
|
|
|
ω |
||
|
|
|
|
|
|
|
|
|
|
|
|
ДТ |
|
|
LM |
|
|
|
|
|
ТГ |
+ |
- |
|
|
|
|
ДН |
|
|
|
Рис.5.29. Принципиальная электрическая схема однократноинтегрирующей СУЭП
166
Напряжение задания скорости вращения на входе РС формируется
спомощью командоаппарата КА; полярность напряжения uзс
определяет направление вращения электродвигателя, а величина uзс -
скорость идеального холостого хода электродвигателя. В схеме предусмотрено формирование напряжения выбора необходимой группы ТП («Вперед» или «Назад») при помощи релейного элемента РЭл, на вход которого подается напряжение задания величины якорного тока
uзт , а на выходе формируется входное напряжение логического
переключающего устройства ТП UЛПУ , полярность которого определяет выбор нужной группы ТП.
Определим динамические свойства однократноинтегрирующей системы регулирования, для чего выведем передаточную функцию замкнутого контура регулирования скорости вращения, настроенного на
МО использую структурную схему рис.5.25 и выражение для kрс (5.26),
когда выходной координатой является скорость вращения электродвигателя ω, а входной - напряжение задания скорости на входе
РС uзс :
W |
(p) |
= |
|
|
ω(p) |
|
= |
|
1 |
|
|
|
|
= |
|
|
||||||||
|
uзс (p) |
|
|
Tмp |
|
|
|
|
|
|
|
|||||||||||||
|
|
замс |
|
|
|
|
|
|
|
|
|
+ kос |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kрсWзтк (p)Rэ / с |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
= |
(5.30) |
||
|
4Tµ R |
k |
|
сT p |
(2Tµp(Tµp +1) |
+1) |
|
+ kос |
||||||||||||||||
|
|
|
|
|
э |
|
|
ос |
м |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Tм |
|
с |
kот |
Rэ |
|
|
|
1/kот |
|
|
|
|
|
|
|
|
|
|||||
= |
|
|
|
|
|
|
|
1/ kос |
|
|
|
|
= |
1/ kос |
|
|
|
|
|
|||||
4T p(2T p(T p +1) +1) +1 |
Q |
(p). |
|
|
|
|
|
|
||||||||||||||||
µ |
|
|
µ |
|
µ |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
||||
Как видно из (5.30) динамические свойства замкнутого контура регулирования скорости определяются только минимальной постоянной
времени Tµ независимо от параметров объекта регулирования и имеют
показатели, соответствующие системе третьего порядка, настроенной на МО (таблица 1).
167
Передаточная функция разомкнутого конура регулирования скорости, настроенного на МО, будет отличаться от передаточной функции разомкнутого токового контура, только величинами постоянных времени, отличающимися при настройке на МО в два раза, т.е.
W |
(p) = uос (p) |
= |
|
|
1 |
≈ |
1 |
|
|
1 |
, |
|||
4T p(2T2p2 + 2T p +1) |
4T p (2T p +1) |
|||||||||||||
разс |
u |
зс |
(p) |
|
|
|
||||||||
|
|
|
|
µ |
µ |
µ |
|
µ |
|
|
µ |
|
||
откуда видно, что частота среза контура регулирования скорости в |
|
|||||||||||||
два раза |
меньше |
|
частоты среза |
контура регулирования |
тока |
|
||||||||
ωсс =1/ 4Tµ и для |
Tµ =1.67…10.0 |
мс |
будет находиться в пределах |
|
||||||||||
150…25 с-1
Пример 11. Для параметров СУЭП, рассмотренных в примерах 5 и
9 (kп = 25; Тμ = 0,01с; Rэ = 0,115Ом; Тэ = 0,05с; с=кФн=3,5 Вс; Тм =
0,08с; kот= 0,0208 В/А; ωн =59,1с-1), рассчитать параметры регулятора скорости и оценить динамические свойства контура регулирования скорости.
Примем за максимальную скорость вращения скорость идеального холостого хода электродвигателя при номинальном напряжении: ωmax = ω0 = Uн/с = 220/3,5 ≈63 с-1, тогда коэффициент обратной связи по скорости будет равен: kос = uосmax/ ωmax = uзсmax/ ωmax = 10/63 = 0,1587 Вс.
Коэффициент передачи РС определится: kрс=(Тм*с*kот)/(4Тμ*Rэ*kос)= (0,08*3,5*0,0208)/(4*0,01*0,115*0,1587) =
7,98. Для моделирования переходных процессов воспользуемся отлаженной моделью замкнутого токового контура ЗТК, настроенного на МО с компенсацией влияния внутренней обратной связи по ЭДС электродвигателя (пример 10), дополнив модель внешним контуром регулирования скорости. Схема модели представлена на рис.5.30.
168
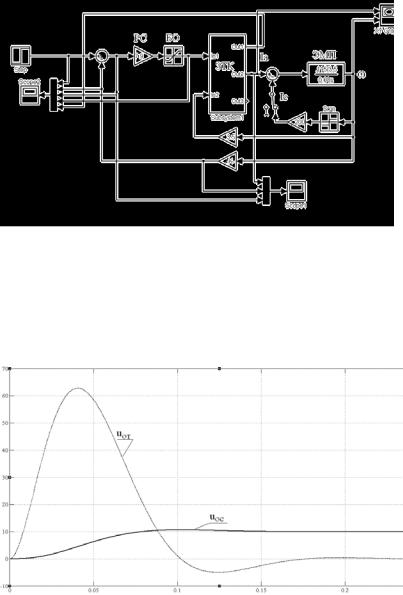
Рис.5.30. Схема модели контура регулирования скорости
Результаты моделирования контура регулирования скорости при скачкообразном задании максимального напряжения uзсmax =10В в
режиме холостого хода без ограничения выходного напряжения РС (система остается линейной) представлены на рис. 5.31.
Рис.5.31. Переходные процессы в линейной системе регулирования скорости
169

Как видно из рис.5.31 переходные процессы соответствуют настройке контура регулирования скорости на МО, в соответствии с
таблицей 1 (время нарастания 7,6 Tµ , перерегулирование 8%). Однако
это соответствует лишь теоретическим переходным процессам, поскольку для обеспечения такого быстродействия контура скорости необходимы значения якорного тока в 15…20 раз превышающие номинальный ток (см. рис.5.31), что невозможно получить в двигателях постоянного тока независимого возбуждения, у которых перегрузка по току не превышает λI≤2,5. К тому же и разгон электродвигателя за время
7,6 Tµ не только невозможен, но и не нужен, поскольку большинство
механизмов обладают вполне определенной величиной ускорения, требуемого для обеспечения технологического процесса.
Контрольные вопросы:
1.Какие звенья входят в состав контура регулирования скорости двигателя?
2.Как правильно рассчитать коэффициент обратной связи по скорости?
3.Выведите передаточную функцию регулятора скорости.
4.С какой целью выполняется ограничение выходного напряжения регулятора скорости?
5.Нарисуйте характеристику вход – выход регулятора скорости.
6.Выведите уравнение электромеханической характеристики однократно – интегрирующей СУЭП.
7.От чего зависит статическая просадка скорости в данной СУЭП?
8.Почему данную систему регулирования называют астатической по заданию и статической по нагрузке (для пояснения используйте электромеханические характеристики)?
9.Как отрабатывает данная система регулирования возрастание момента нагрузки на валу двигателя (для пояснения используйте характеристику регулятора скорости и электромеханические характеристики)?
10.Поясните назначение элементов в схеме рис. 5.29.
11.Что определяет полярность напряжения задания на входе регулятора скорости?
12.На что влияет величина напряжения задания на входе регулятора скорости?
13.С какой целью в схеме рис.5.29 применяют релейный элемент?
170