

диапазон регулирования скорости и жесткость механических характеристик двигателей.
Система СУЭП верхнего уровня выполняет задачу автоматизации работы стана: вырабатывает команды взаимодействия электроприводов механизмов стана, обеспечивает совместный разгон и торможение, поддержание заданной толщины и натяжения прокатываемого металла и т.п.
Различаясь функционально, СУЭП верхнего и ни жнего уровней конструктивно могут быть выполнены из ра зных блоков, но могут и объединяться в общей панели управления или в едином универсальном управляющем устройстве — программируемом контроллере.
Контрольные вопросы.
1.Дайте определение «системы управления электропривода».
2.По каким признакам классифицируют СУЭП?
3.Какой из классификационных признаков является главенствующим и почему?
4.Что входит в состав СУЭП?
5.В чем отличие замкнутых и разомкнутых систем регулирования?
6.Какой основной принцип управления лежит в основе замкнутых систем регулирования?
7.Чем отличаются системы регулирования прямого и косвенного действия?
8.Что такое адаптивная система управления?
9.Что входит в понятие «комплектный электропривод»?
10.Чем различаются СУЭП верхнего и нижнего уровней?
11.Какие основные функции выполняет СУЭП верхнего уровня?
12.Какие основные функции выполняет СУЭП нижнего уровня?
ГЛАВА 1. РЕЛЕЙНО-КОНТАКТОРНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
Широкое применение во всех отраслях промышленности получили электроприводы с питанием электродвигателей от сети с неизменным напряжением. Управление такими электроприводами осуществляется релейно-контакторной аппаратурой. Релейно-контакторные системы
11
управления (РКСУ) - это логические системы управления, выполненные на релейно-контакторной элементной базе и осуществляющие автоматические пуск, торможение, реверсирование и останов электродвигателя, а также обеспечивающие его защиту.
Электропривод, выполненный на основе РКСУ, представляет собой простой, как правило, нерегулируемый электропривод постоянного или переменного тока, в основном общепромышленного применения, например, электропривод кранов, лифтов, конвейеров, вентиляторов, насосов, некоторых транспортных устройств и т. п. В таблице представлены параметры, характеризующие современную релейноконтакторную аппаратуру [2]:
Таблица 1 Технические характеристики релейно-контакторной аппаратуры
Время срабатывания tСР, с |
0,005 – 0,4 |
|
Число включений в час, N |
600 … 1200 для контакторов, |
|
|
1200 … 3600 для реле |
|
|
40 000 |
для герконов |
Потребляемая мощность SП, ВА |
5 … 50 для контакторов |
|
|
0,2 …5 для реле |
|
Срок службы (общее число |
106 … 107 |
|
включений в час) |
|
|
Масса m, кг |
0,03 … 5 |
|
Кдостоинствам РКСУ можно отнести: наличие гальванической развязки силовых цепей от цепей управления; значительную коммутационную мощность (до нескольких кА); высокую помехоустойчивость.
Кнедостаткам РКСУ относятся: контактная коммутация, требующая соответствующего ухода за аппаратурой и ограничивающая срок ее службы; ограниченное быстродействие; повышенные массогабаритные показатели и энергопотребление.
Электротехническая промышленность поставляет релейноконтакторные схемы в виде законченных изделий – станций управления, на которых собраны типовые схемы для управления движением электропривода, а также необходимые защиты.
1.1 Условные обозначения и правила построенияэлектрических схем
Электротехнические устройства и их элементы в электрических схемах изображают в виде условных графических обозначений,
регламентируемых государственным стандартом.
12
Обозначения наиболее распространенных электротехнических элементов и устройств приведены в приложении А (таблица А1).
Буквенные коды электрических элементов приведены в таблице А2 (приложение А). Первая латинская буква кода отражает укрупненные функциональные признаки элемента схемы. Более детально признаки элемента могут быть отражены двухбуквенным кодом. Во многих учебниках и учебных пособиях для наглядности и легкости восприятия применяют буквенно-цифровые обозначения на русском языке, что не противоречит ГОСТу, который разрешает применение обозначений на русском языке в дополнение к основному латинскому коду, если это способствует лучшему пониманию схемы (приложение А, табл. А2). В данном учебном пособии применяется комбинированная система буквенных обозначений.
Электротехнические устройства, промышленные установки и технологические комплексы могут работать совместно с устройствами питания, защиты, сигнализации и управления. Комплекс устройств и элементов, соединенных электрическими проводами, изображают на чертежах в виде электрических схем.
По назначению электрические схемы разделяют на структурные, функциональные, принципиальные, соединений и подключения (или внешних соединений).
Принципиальные схемы дают полное представление о составе входящих в данную электроустановку элементов, связях между ними и работе всех электрических цепей. При изображении электрической принципиальной схемы необходимо соблюдать следующие правила:
-указывать элементы на схеме в соответствии с условным графическим изображением;
-для получения наиболее простого начертания схемы выполнять линии связи под углом 900 или кратных ему (иногда используют угол
450);
-изображать элементы устройств в обесточенном (отключенном) состоянии;
-использовать разнесенный способ изображения, когда элементы одного аппарата (катушка пускателя, контактора, реле и их контакты) могут находиться в разных частях схемы;
-при начертании схемы широко использовать строчный способ изображения (в каждой строке элементы находятся последовательно один за другим);
-присваивать каждому элементу в схеме уникальное «имя» в виде буквенно-цифрового изображения.
13
Таким образом, в основу принципиальной схемы в первую очередь заложено удобство чтения схемы.
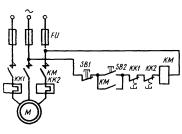
Рассмотрим в качестве примера принципиальную схему включения асинхронного короткозамкнутого двигателя М в сеть с помощью магнитного пускателя КМ (рис. 1.1). Пуск и отключен ие двигателя осуществляется с помощью кнопок SB2 («Пуск») и SB1 («Стоп»).
Рис. 1.1. Принципиальная схема включения асинхронного
двигателя
Всхеме предусмотрена защита двигателя от коротких замыканий
спомощью предохранителей FU и от перегрузок с помощью тепловых реле КК1 и КК2, встроенных в магнитный пускатель. Магнитный пускатель КМ состоит из катушки, трех силовых контактов и одного вспомогательного (блокировочного) контакта в цепи управления. Все элементы пускателя имеют одно и то же «имя» КМ. Тепловые реле, хотя и встроены в один конструктивный узел с магнитным пускателем, имеют свое собственное «имя» - КК1 и КК2.
Если в схеме установлены несколько однотипных элементов (контакторов, пускателей, реле), то в этом случае им присваиваются номера, например, КМ1, КМ2 и т.д.
Внекоторых случаях для удобства восприятия схемы нумеруют контакты, принадлежащие одному и тому же электрическому аппарату. Например, буквенное обозначение КМ1-2 (или КМ1.2) следует читать так: второй контакт контактора номер один.
1.2.Принципы управления пуско – тормозными режимами в РКСУ
Вэлектроприводах с электродвигателями средней и большой мощности при пуске и торможении требуется ограничить пусковой ток,
14
исходя из перегрузочной способности двигателя. Для этой цели в якорную цепь двигателя (или роторную асинхронного двигателя) включаются пусковые резисторы.
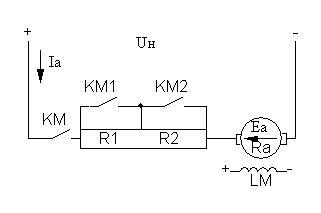
Рассмотрим алгоритм работы системы управления при пуске в две ступени двигателя постоянного тока независимого возбуждения по схеме, изображенной на рис. 1.2.
Рис. 1.2. Схема силовой цепи пуска двигателя в две ступени
При пуске стремятся получить правильную пусковую диаграмму, когда все броски тока I1 равны между собой и все токи переключения I2 одинаковы (рис.1.3).
Перед началом пуска обмотка возбуждения двигателя должна быть подключена к источнику питания для создания магнитного потока двигателя.
15
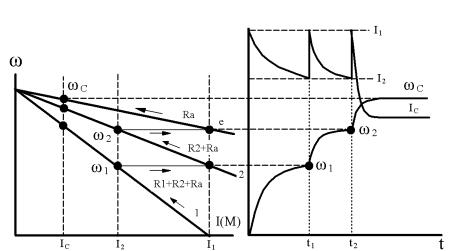
Рис. 1.3. Электромеханические характеристики и переходные процессы припуске двигателя в две ступени
Для ограничения пускового тока допустимой величиной включены два пусковых резистора R1 и R2. Поэтому, при подключении якоря двигателя к напряжению питающей сети, по якорной цепи станет протекать пусковой ток I1, определяемый следующей зависимостью:
I1 |
= |
Uн |
|
≤ λIн , |
|
R1+ R2 |
+ Ra |
||||
|
|
|
где λ- перегрузочная способность двигателя (2 … 2,5); Iн – номинальный ток двигателя;
R1 и R2 – сопротивление пусковых резисторов;
Ra =β(rяо+ rдп + rко)– сопротивление якоря двигателя, включающее в себя сопротивление обмоток якоря rяо, добавочных полюсовдвигателяr;дп и компенсационной rко, приведенное к рабочей температуре
β= 1,24…1,32 – коэффициент приведения к рабочей температуре 800С.
16

При линейных электромеханических (механических) характеристиках двигателя переходные процессы (изменение параметров во времени) будут экспоненциальными, и соответствовать уравнениям
[9,14]:
ω(t) = ω |
устi |
+(ω |
начi |
−ω |
устi |
)exp(− |
|
t |
|
) |
|
||
Tмi |
|
||||||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
I(t) = Iустi +(Iначi −Iустi )exp(− |
t |
|
) |
|
|
|
|||||||
Tмi |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M(t) = Mустi +(Mначi −Mустi )exp(− |
|
t |
) |
||||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Tмi |
||
где ωначi |
- начальное значение скорости двигателя, с которой |
||||||||||||
начинается расчет переходного процесса для i-той характеристики, 1/с; |
|||||||||||||
ωустi - |
|
установившееся |
значение |
|
скорости, соответствующее |
||||||||
нагрузке двигателя (Iс), до которой разогнался бы двигатель на i-той характеристике, 1/с;
T |
= |
JΣRi |
- электромеханическая постоянная времени |
|
|||
мi |
|
(kФн )2 |
|
|
|
|
|
электропривода для i-той характеристики, с; |
|||
JΣ - |
суммарный приведенный момент инерции электропривода, |
||
кгм2; |
|
|
|
Ri - |
суммарное сопротивление якорной цепи на i-той |
||
характеристике; |
|
||
kФн = Uн − Iн Ra - постоянная двигателя, Вс,
ωн
k = p2пπNa - конструктивный коэффициент двигателя, зависящий от
числа пар главных полюсов pп, числа активных сторон якорной обмотки N и числа пар параллельных ветвей якорной обмотки a.
17
Например, для первого этапа пуска по реостатной характеристике
1:
|
|
ω |
= 0 |
, |
ω |
уст1 |
= Uн −Iс (R1+ R2 + Ra) |
, |
|||||||
|
|
нач1 |
|
|
|
|
|
|
|
kФн |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
T |
= |
JΣ (R1+ R2 + Ra) |
, I |
нач1 |
= I |
, I |
|
= I |
|
. |
|
||||
|
(kФн )2 |
|
|
|
|
||||||||||
м1 |
|
|
|
|
|
1 |
|
уст1 |
|
с |
|
|
|||
Под действием пускового тока (момента) двигатель начнет разгоняться по реостатной характеристике 1 (рис.1.3) с динамическим током (моментом), равным разности между действительным током двигателя и током статическим (Ia – Ic).
При увеличении противоЭДС двигателя ток якорной цепи уменьшается (следовательно, уменьшается динамический ток, соответственно, уменьшается и ускорение) и в момент времени t1 двигатель разгонится до скорости ω1, а ток уменьшится до величины I2 (рис. 1.3.), определяемой соотношением:
I2 |
= |
Uн − kФω1 |
|
R1+ R2 + Ra |
|||
|
|
В этот момент необходимо выключить пусковой резистор R1, для чего нужно замкнуть контакт КМ1. Поскольку скорость двигателя не может измениться мгновенно, то двигатель с величиной скорости ω1 переходит на реостатную характеристику 2, при этом ток скачком возрастает до величины I1, в соответствии с выражением:
I1 = Uн − kФω1 .
R2 + Ra
Для этапа разгона по второй реостатной характеристике справедливы соотношения:
ω |
= ω = Uн − I2 (R1+ R2 + Ra) |
= |
Uн − I1(R2 |
+ Ra) |
, |
|
|
|
|||||
нач2 |
1 |
kФн |
|
kФн |
|
|
|
|
|
|
|
||
|
|
18 |
|
|
|
|

ωуст2 = Uн−Iс (R2 + Ra) , Tм2
kФн
Iнач2 = I1 , Iуст2 = IС .
Двигатель продолжает разгон характеристике и в момент времени t2 уменьшается до величины I2, равной:
= JΣ(R2 + Ra) ,
(kФн )2
по второй реостатной достигает скорости ω2, а ток
I2 = Uн − kФω2 .
R2 + Ra
В этот момент необходимо выключить пусковой резистор R2, для чего нужно замкнуть контакт КМ2. Поскольку скорость двигателя не может измениться мгновенно, то двигатель с величиной скорости ω2 переходит на естественную характеристику (е), при этом ток скачком возрастает до величины I1, в соответствии с выражением:
I1 = Uн −kФω2 . Ra
Двигатель продолжает разгон по естественной характеристике до скорости ωс, соответствующей статическому току IС, при этом установившееся значение якорного тока будет определяться соотношением:
Ia = Uн −kФωc = IС
Ra
Таким образом, на основании анализа переходных процессов пуска двигателя (рис. 1.3), можно сделать вывод о том, что выключение пусковых резисторов должно происходить в определенные моменты времени (t1, t2), при определенной величине скорости вращения (ω1, ω2) и при определенной величине якорного тока (I2).
Поэтому управление пуско – тормозными режимами двигателей в РКСУ осуществляется:
19