

обеспечивающего при Uн = 220 В и токе о тсечки Iотс = 100А величину тока стопорения Iстоп = 150 А.
При токе якоря, равном току стопорения (Iа = Iстоп), статическая просадка скорости в замкнутой системе регулирования равна скорости идеального холостого хода при номинальном напряжении (см. рис.3.22). Поэтому будет справедливо следующее равенство:
Δω = ω0 = IстопRэ/с + (Iстоп - Iотс) Kот Кр Кп Kбн/с,
из которого легко определить величину Kбн = (Uн/с - IстопRэ/с)/(
(Iстоп - Iотс) Kот Кр Кп)/с =
(220 – 150*0,2)/((150-100)*0,05*1*25) = 3,04
ГЛАВА 4. СИСТЕМЫ УПРАВЛЕНИЯ С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ КООРДИНАТ
Последовательно - подчиненное регулирование координат – это блестящий методологический принцип, давший мощный толчок развитию и усовершенствованию систем управления электроприводами в самых различных сферах применения. Широкое распространение систем подчиненного регулирования с последовательной коррекцией обусловлено рядом важных положительных качеств этих систем, к которым прежде всего относятся:
•- глубокая внутренняя логика последовательного решения сложной задачи по частям;
•- возможность наращивания структуры системы и количества контролируемых координат состояния объекта;
•- упорядоченность и простота процедур синтеза регуляторов многоконтурной системы;
•- унификация методов расчета, алгоритмов и технических средств управления;
•- стандартизация показателей качества процессов регулирования
иограничения координат;
•- удобство проектирования, комплектации, наладки и эксплуатации электроприводов.
4.1. Оптимальные структуры
Для обеспечения максимального быстродействия электропривода необходимо выбирать тип электропривода, систему управления и параметры системы с таким расчетом, чтобы получить оптимальный характер переходного процесса. Оптимальным переходным процессом
считается такой процесс, при котором время нарастания было бы минимально возможным, а перерегулирование не превышало
105

допустимого значения. В основе получения оптимальных систем регулирования лежит известный в ТАУ критерий минимизации интегральной среднеквадратичной ошибки регулирования [5,6,9].
Рассмотрим замкнутую систему регулирования (рис.4.1) с единичной
обратной связью, в прямом канале которой включены апериодическое звено с постоянной времени Т1 и интегрирующее звено с постоянной времени Т2, причем Т 2>Т1. Определим передаточную функцию замкнутого контура регулирования:
Xз |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
X |
|
|||||||
|
|
|
|
|
|
|
|
|
|
Т2р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т1р +1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||||||||||||
Рис. 4.1. Структурная схема системы регулирования |
|
|||||||||||||||||||||
Wзам (p) = |
|
X(p) |
= |
1 |
|
|
|
|
= |
|
|
|
1 |
|
|
, (4.1) |
||||||
X |
(p) |
T p(T p |
+1) +1 |
T T p2 |
+ T p +1 |
|
||||||||||||||||
|
|
з |
|
|
|
|
2 1 |
2 1 |
2 |
|
|
|
||||||||||
где Xз и X - заданное и действительное значение регулируемой координаты.
Из (4.1) видно, что знаменатель полученной передаточной функции соответствует знаменателю передаточной функции колебательного звена, поэтому их можно приравнять:
|
|
|
|
|
T T p2 |
+ T p +1 = T2p2 |
+ 2ξTp +1 . |
(4.2) |
||||
|
|
|
|
|
2 |
1 |
2 |
|
|
|
|
|
|
|
Из |
(4.2) |
следует, |
что |
|
= T;T = 2ξT , а |
коэффициент |
||||
|
|
T T |
||||||||||
демпфирования |
определяется |
2 |
1 |
|
2 |
|
||||||
отношением постоянных времени |
||||||||||||
|
1 |
|
|
|
|
|
|
|
||||
ξ = |
|
T2 |
. Из |
теории |
автоматического |
управления |
известно, что |
|||||
2 |
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
переходный процесс будет оптимальным, если модуль амплитудной частотной характеристики замкнутого контура в широком диапазоне
изменения |
частот |
остается |
постоянным, |
равным |
единице |
|
|
|
106 |
|
|

Aзам (ω) =1 = const . Для колебательного звена амплитудная частотная характеристика определяется выражением:
|
|
|
A(ω) = |
1 |
|
|
|
|
|
|
(4.3) |
|
|
|
|
(1−ω2T2 )2 + (2ξωT)2 |
|
||||||||
|
|
|
|
|
|
|
|
|||||
Для выполнения условия |
A (ω) =1, |
в выражении (4.3) |
должно |
|||||||||
выполняться |
равенство (1−ω2T2 )2 + (2ξωT)2 |
=1 . Или, |
|
раскрыв |
||||||||
скобки и пренебрегая ввиду малости составляющей ω4T4≈0, получим |
||||||||||||
равенство: 2ω2T2 = (2ξωT)2 . |
|
|
|
|
|
|
||||||
Т.к. |
|
|
= T;T |
= 2ξT , |
последнее |
равенство |
|
можно |
||||
|
T T |
|
||||||||||
|
2 |
1 |
2 |
|
|
|
|
|
|
|
||
представить |
в следующем |
виде T2 |
= 2T T , |
откуда легко |
можно |
|||||||
|
|
|
|
|
|
2 |
2 |
1 |
|
|
T2 T = 2 . |
|
получить |
соотношение |
для |
постоянных |
времени |
||||||||
Следовательно, для |
получения |
оптимального переходного |
|
1 |
||||||||
процесса |
||||||||||||
необходимо, чтобы постоянная времени Т2 была в два раза большей, чем постоянная времени Т1.
В этом случае передаточная функция замкнутого контура регулирования примет вид:
Wзам (p) = |
|
1 |
|
|
= |
|
1 |
|
|
|
, |
(4.4) |
|
2T p(T p +1) +1 |
2T2p2 + 2T p +1 |
||||||||||||
|
1 |
1 |
|
|
|
1 |
|
|
1 |
|
|
|
|
которой соответствует |
переходная |
функция (реакция |
на единичный |
||||||||||
входной скачек): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− t |
2T |
|
|
t |
|
|
t |
|
|
|
h(t) =1 |
−e |
|
1 (cos |
|
|
+sin |
|
|
) . |
|
(4.5) |
||
|
2T |
2T |
|
||||||||||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
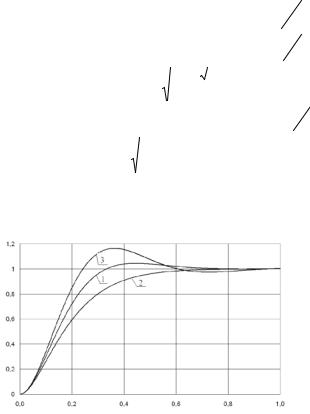
Переходный процесс, соответствующий (4.5) показан на рис.4.2 (кривая 1) и соответствует переходному процессу колебательного звена с
коэффициентом демпфирования |
ξ = |
1 |
T2 |
= |
|
2 |
= 0.707 |
. При отклонении |
|
2 |
T |
2 |
|
||||
|
|
|
|
|
||||
|
|
|
1 |
|
|
|
|
|
|
107 |
|
|
|
|
|
|
|
соотношения |
постоянных |
времени |
от |
|
оптимального |
T2 T |
= 2 , |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
переходный |
процесс отклоняется |
от |
оптимального. |
При |
T2 T |
= 4 , |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
= |
|
|
|
|
|
|
|
|||||
коэффициент |
демпфирования |
равен ξ = |
|
T2 |
4 |
=1 |
и переходный |
|||||||||||
|
|
|
|
|
2 |
|
T |
|
2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
процесс носит монотонный характер (кривая 2 на рис.4.2), а при T2 |
T =1 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
1 , |
|
|
|
|
||||||||
коэффициент |
демпфирования ξ = |
T2 |
= |
|
при |
этом |
возрастает |
|||||||||||
|
|
|
2 |
T |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перерегулирование и затягивается время переходного процесса (кривая 3
на рис. 4.2).
Рис. 4.2. Переходные процессы при различных соотношениях постоянных времени
Вывод соотношения постоянных времени для получения оптимального переходного процесса можно выполнить для системы с тремя и более постоянными времени, при этом для n постоянных будет получено следующее равенство:
Tn |
= |
T3 |
= |
T2 |
= a = 2 . |
(4.6) |
|
T |
|||||||
|
T |
|
T |
|
|
||
n−1 |
|
2 |
|
1 |
|
|
108
Соотношение (4.6) широко применяется на практике и известно в технической литературе под названием модульного оптимума (МО) или технического оптимума. Данная настройка системы регулирования удовлетворяет требованиям электропривода большого количества механизмов по допустимой величине перерегулирования и быстродействию.
Основные показатели настроенных на модульный оптимум систем регулирования с единичными обратными связями представлены в таблице 1.
109
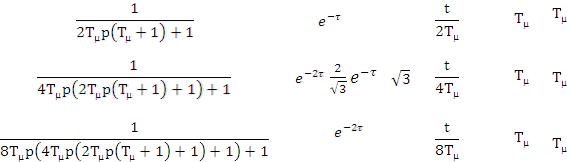
Таблица 1 Показатели систем, настроенных на модульный оптимум
регулированияконтура№ |
уравнения.дифПорядок |
Передаточная функция замкнутой системы с единичной обратной |
Переходная функция системы h(τ) |
Относительноевремя τ |
Перерегулированиеσ, % |
нарастанияВремяtн |
Времядостижения tmax,максимума |
|||
|
|
|
|
|
|
|||||
|
|
связью Wзам(p) |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
1- |
(cos(τ)+sin(τ)) |
|
|
4,3 |
4,7 |
6,28 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
3 |
|
1- |
- |
sin( |
τ) |
|
8,0 |
7,6 |
10 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
3 |
4 |
|
|
1- |
((1- |
|
|
6,2 |
|
|
|
|
τ)cos(2τ)+2(1+τ)sin(2τ)) |
|
|
14,4 |
|
||||
|
|
|
|
|
|
|
18 |
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
110