Механизмы обгона
рис.25
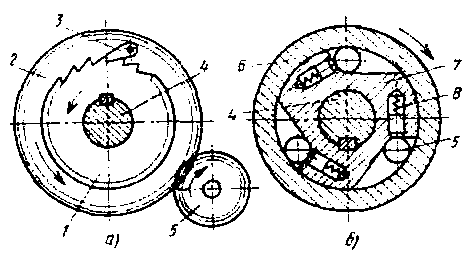
Если последнему сообщить большую частоту вращения в том же направлении (от другого источника движения), то оно начнет обгонять диск 2.Защелка3препятствовать этому обгону не будет. После выключения быстрого вращения вала4защелка зацепит храповое колесо и поведет его снова. Таким образом механизм обгона позволит, не выключая привода медленного вращения, включать быстрое вращение вала4.
На рис.25,бпредставлен роликовый механизм обгона, получивший наибольшее распространение. На валу4свободно насажена втулка6, а на шпонке - диск 7, имеющий три выреза. Внутри последних находятся ролики 5, поджимаемые пружинами8.Медленное вращение по часовой стрелке получает втулка6. Ролики, увлекаемые силами трения и поджимаемые пружинами, попадают в клиновое пространство и заклиниваются между внутренней поверхностью втулки6и вырезами диска7. В результате этого диск начинает медленно вращаться вместе с валом4.Если последнему сообщить от другого источника большую угловую скорость в том же направлении (по часовой стрелке), то вместе с ним получит вращение и диск7. Ролики вместе с диском начнут обгонять втулку6и расклинятся. При выключении быстрого вращения ролики заклиниваются, и вал снова получит малую скорость вращения.
Механизм может работать и по другому варианту. Если ведущим звеном будет диск 7и вращение его происходит против часовой стрелки, то втулка6окажется ведомой. При реверсировании механизм расклинивается.
8.5. Mеханизмы получения прямолинейного поступательного движения.
Для преобразования вращательного движения в поступательное в станкостроении используются различные типовые механизмы, показанные далее.
Винтовая передача. Наиболее распространенным механизмом для преобразования вращательного движения в поступательное являются винтовые передачи (рис.26). При этом могут быть различные варианты преобразования движения:
1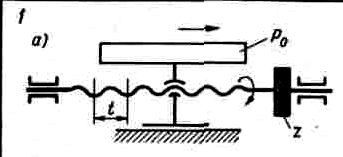 )
винт вращается, а гайка совместно с
рабочим органомР0
движется поступательно
— поз. а (перемещение
продольных салазок суппорта токарного
станка при нарезании резьб);
)
винт вращается, а гайка совместно с
рабочим органомР0
движется поступательно
— поз. а (перемещение
продольных салазок суппорта токарного
станка при нарезании резьб);
2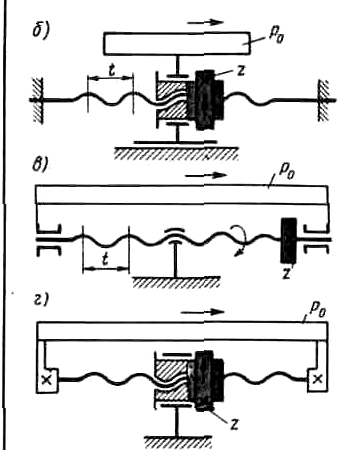 )
винт неподвижный, гайка вращается и
совместно с рабочим органомР0
совершает поступательное
движение — поз. б
(стол продольно-фрезерного
станка модели 6А662);
)
винт неподвижный, гайка вращается и
совместно с рабочим органомР0
совершает поступательное
движение — поз. б
(стол продольно-фрезерного
станка модели 6А662);
3) гайка неподвижная, винт вращается и одновременно совместно с рабочим органом Р0 совершает поступательное движение — поз. в (продольная подача стола в консольно-фрезерных станках);
4) гайка вращается, а винт совместно с рабочим органом Р0 имеет поступательное движение — поз. г (суппорт строгального станка).
Рис.26
Р
Рис.27
Ч Рис.28
К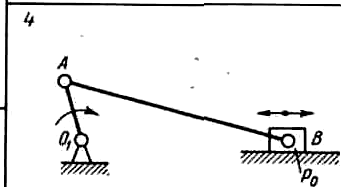 ривошипно-шатунный
механизмЭтот механизм
при равномерном вращении кривошипа
01
А (рис. 29)
обеспечивает
прямолинейное возвратно-поступательное
движение ползуна В,
но с переменной
скоростью. Причем скорость ползуна при
прямом и обратном ходе будет
одинаковой.
ривошипно-шатунный
механизмЭтот механизм
при равномерном вращении кривошипа
01
А (рис. 29)
обеспечивает
прямолинейное возвратно-поступательное
движение ползуна В,
но с переменной
скоростью. Причем скорость ползуна при
прямом и обратном ходе будет
одинаковой.
Кривошипно-реечный механизм
Рис.29 Рис.32 Рис.30
Кривошипно-кулисный механизм
При вращении кривошипа О1 А (рис. 31) кулиса Ка совершает возвратно-качательное движение и через шатун ВС сообщает рабочему органу Р0 прямолинейное возвратно-поступательное движение.
Рис.31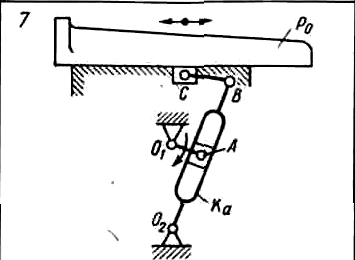
Кривошипно-кулисный механизм до последнего времени применялся в приводах движения резания поперечно-строгальных и долбежных станков.
М еханизм
с вращающейся кулисой
еханизм
с вращающейся кулисой
Рис.32
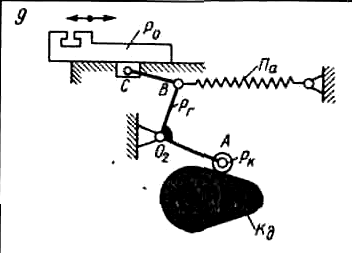
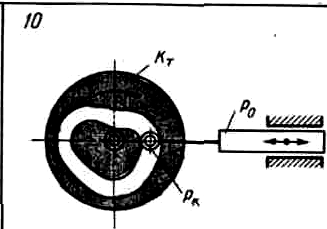
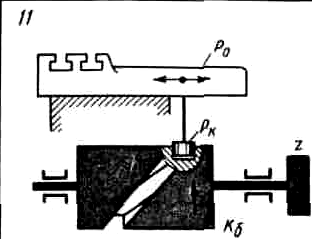
Кулачковые механизмы. Эти механизмы позволяют обеспечить любой закон изменения скорости рабочего органа, получать необходимое соотношение скорости рабочего и обратного ходов и в отличие от других механизмов могут одновременно выполнять функции командно-распределительного устройства. Благодаря этим преимуществам кулачковые механизмы (рис.33) с дисковыми, торцовыми или цилиндрическими кулачками нашли широкое применение в станках-автоматах и полуавтоматах для осуществления автоматического цикла работы.
Рис.33