

11.7. Карусельно-фрезерные станки.
Карусельно-фрезерные станки предназначены для обработки плоскостей литых кованых и штампованных деталей по методу непрерывного торцового фрезерования.
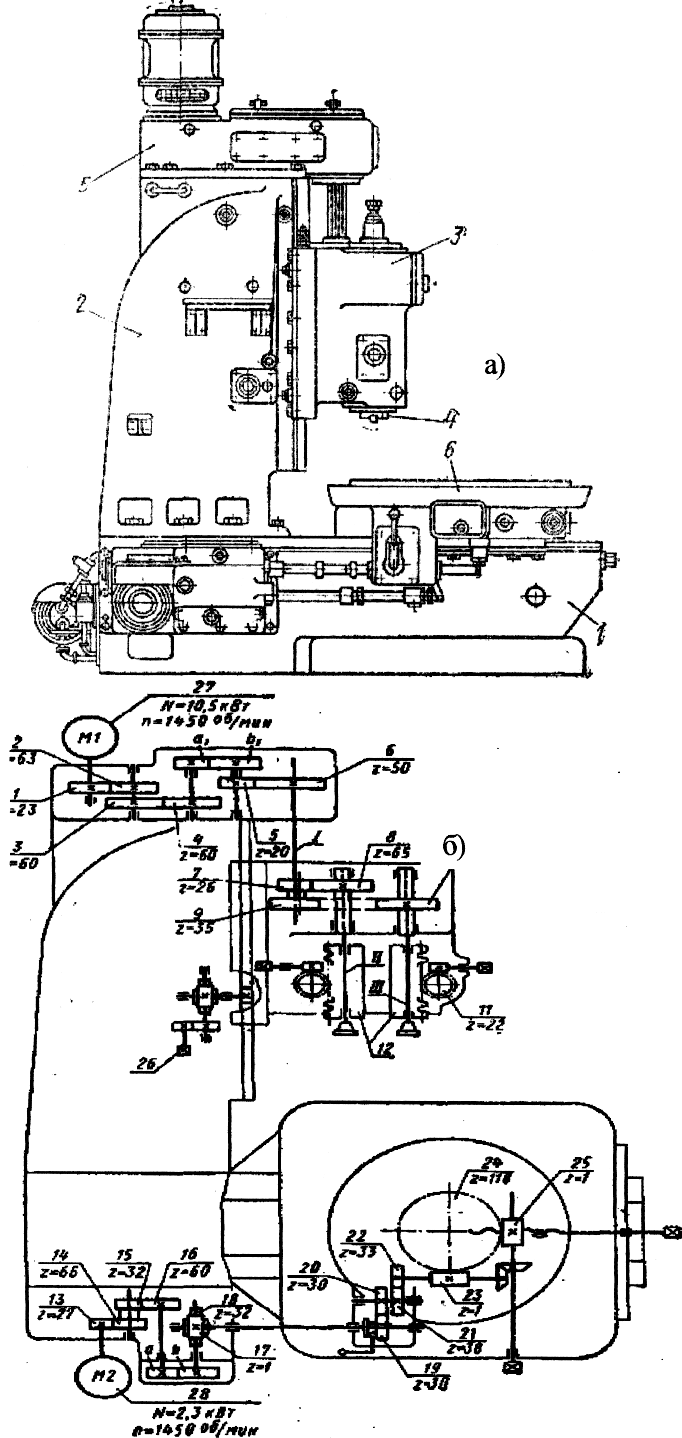
На рис. 55 показан карусельно-фрезерный двухшпиндельный станок. На станине 1 установлена стойка 2, в вертикальных направляющих которой смонтирована шпиндельная бабка 3. Бабка имеет два шпинделя 4 с приводом вращения от коробки скоростей 5, помещенной в верхней части стойки 2. На горизонтальных направляющих станины 1 смонтирован стол 6, получающий во время работы медленное вращение в виде круговой подачи. Такая компоновка узлов станка позволяет фрезеровать непрерывно. Обработанные детали, выйдя из зоны резания, могут быть заменены заготовками. Наличие двух шпинделей дает возможность совместить в одной операции черновое и чистовое фрезерование.
Привод главного движения осуществляется от электродвигателя, расположенного в верхней части стойки, через систему зубчатых передач и гитару скоростей а1—b1(рис.55, б).
Вертикальный вал 1 проходит внутри шлицевой втулки с насаженными на ней косозубыми колесами 7и8. Первое связано с колесом8чернового шпинделя //, второе - с колесом10чистового шпинделя ///. Шпиндели смонтированы в гильзах12, которые с помощью реечных передач11могут устанавливаться на необходимую высоту. Вращением рукоятки26шпиндельную бабку перемещают вертикально. Частота вращения чистового шпинделя примерно в 1,8 раза больше, чем у чернового.
Привод круговой подачи стола состоит из отдельного электродвигателя и цепи зубчатых передач со звеном настройки а-б. Подача выключается выводом из зацепления зубчатых колес19и20. Ручной поворот стола производится при помощи червяка25при выключенной подаче.
Рис. 55. Карусельно-фрезерный станок:
а)-общий вид; б)- кинематическая схема
11.8. Копировально-фрезерные станки.
Копировально-фрезерные станки предназначены для обработки разнообразных плоских профилей (изготовление кулачков, шаблонов, матриц и т. д.) и пространственно-сложных поверхностей (объемное фрезерование).
Копировально-фрезерные станки по числу шпинделей делятся на одношпиндельные и многошпиндельные, а по принципу действия - на станки прямого и следящего действия. В копировальных станках прямого действия всякое изменение формы — задающего устройства (шаблона или копира) производит непосредственное воздействие на копировальный ролик или палец, связанный жестко с фрезой. Станки следящего действия имеют устройство, которое посредством копировального ролика или пальца воспринимает всякое изменение формы задающего устройства и передает его фрезе через усилительное устройство. Фрезерование производят при помощи ощупывания модели копировальным пальцем двумя способами: способом горизонтальных строчек и способом вертикальных строчек.
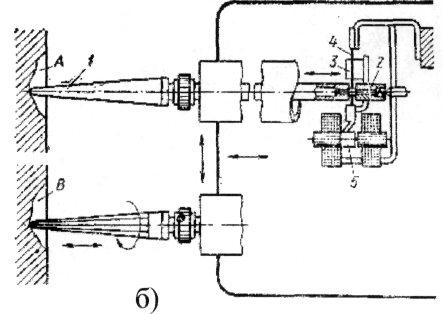
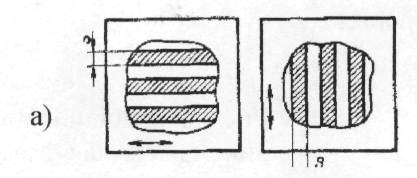
Рис. 56. Схема работы следящего пальца
При втором способе (рис. 56, б) фрезерная головка совершает задающее вертикальное и следящее продольное перемещения, а стол — периодическое горизонтальное перемещение на величину S. Палец следящего устройства касается модели и автоматически дает команду (импульсы) приводам для одновременного перемещения фрезы по обрабатываемой детали и пальца по рельефу копируемой модели, поскольку и следящий палец и фреза смонтированы на общем корпусе фрезерной головки.
Схема работы следящего пальца показана на рис. 56. Следящий палец 1 касается поверхности рельефа модели А под определенным давлением, а в случае изменения этого давления палец может иметь осевое перемещение, которое через шарик передается его тыльной частью втулке 2, а последняя через пружину касается острия регулировочного винта. Таким образом, осевые перемещения пальца управляются в зависимости от давления на палец.
Указанные осевые перемещения через подвешенный на пружине 4 груз 3,соединенный с втулкой 2, передаются к сердечнику 5 трансформатора. Сердечник подвешен на конце указанных грузов. Перемещение сердечника 5 в магнитном поле трансформатора изменяет электромагнитные импульсы, которые направляются в усилительные устройства, а затем, усиливаясь, поступают в цепи управления электродвигателями подач.