

8.2. Механизмы для бесступенчатого изменения скорости вращения.
Д
рис.11
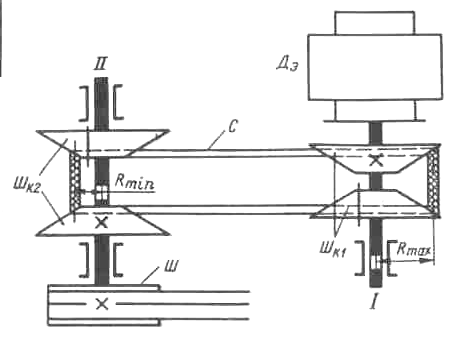
Вариатор с раздвижными конусами. Этот тип вариатора (рис.11) выполняется с различным видом связи С. В качестве связи С применяются стандартные или специальные клиновые ремни, специальная цепь или стальное кольцо трапециевидного сечения. Плавное изменение скорости выходного шкива Ш в диапазоне 4—8 достигается путем одновременного раздвигания одной и сближения другой пары конусов. При этом изменяются диаметры рабочей части ведущих и ведомых конусов.
С рис.12
Тороидный вариатор. Этот
вариатор (рис. 13)
имеет следующий принцип работы. На валу
свободно насажены тороидные шкивы —
ведущий ШТ1
и ведомый ШТ2
, связанные между собой сферическими
дисками Дс.
Последние с рис.13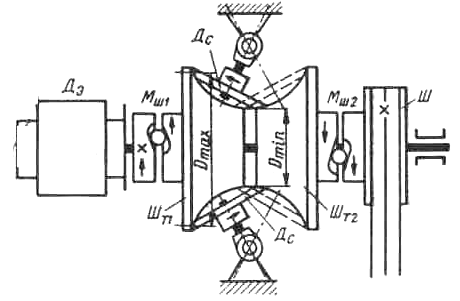 вободно
вращаются на поворотных цапфах. При
указанном на схеме положении сферических
дисков вращение от ведущего тороидного
шкива на ведомый п
вободно
вращаются на поворотных цапфах. При
указанном на схеме положении сферических
дисков вращение от ведущего тороидного
шкива на ведомый п
Г рис.14
8.3. Механизмы для реверсирования движения.
Р рис.15
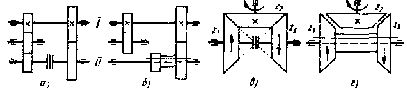
При передаче движения через два зубчатых колеса валы I и IIвращаются в разных направлениях, а при передаче через три зубчатых колеса - в одном направлении. Такой механизм получил название трензель.
Работа реверсивных устройств с коническими колесами основана на том, что два колеса Z1иZ3находясь в зацеплении с колесом Z2(рис.15, в, г ), вращаются в противоположных направлениях. В этом случае реверсирование производят переключением муфты (рис.15,в) или перемещением блока колесZ1 – Z3(рис.15,г). В станках, которые требуют частого реверсирования, в конструкциях, изображенных нарис. 15,а, б, устанавливают фрикционные муфты, в механизмах токарных, карусельных и фрезерных станков — чаще всего кулачковые муфты.
В рис.16
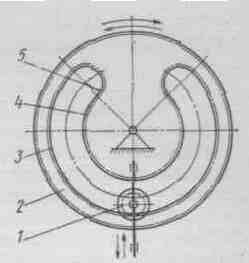
Ведущим звеном в таких механизмах является колесо 1,а ведомым — два концентричных зубчатых сектора внутреннего зацепления3 и наружного зацепления4.соединенных по концам секторами5. Поскольку центр вращения колеса2неподвижен, центр вращения колеса1при зацеплении с различными колесами меняет свое положение. Поочередное зацепление производится при помощи копировального механизма, устанавливающего соответствующее межосевое расстояние. Во время работы частота вращения колеса2и его направление меняются в зависимости от того, с каким колесом связано ведущее звено.