

Розділ 9
Коливальний характер у таких системах вирівнювання з попла- вковим датчиком може бути за недостатнього рівня рідини у баку або слабо затягнутої пружини, яка центрує поплавок.
9.9.2. Стежні гідроприводи
Гідропривід, в якому вихідна ланка повторює рух ланки керу- вання у заданому масштабі, називають стежним.
Стежний гідропривід широко застосовують у системах ручного і автоматичного керування різних машин, агрегатів та виробничих процесів. Щодо сільськогосподарської техніки, такий гідропривід використано у системах автоматичного водіння (САВ) мобільних агрегатів орних, гичко- і коренезбиральних машин, зернозбираль- них комбайнів тощо, а також у гідравлічних системах автоматично- го керування (регулювання): силового під час оранки, завантажен- ня активних робочих органів збиральних машин, положення робо- чих органів тощо.
Коефіцієнт підсилення, який визначається відношенням вихід- ної потужності до потужності вхідного сигналу, практично не обме- жений. Так, у системах рульового керування великими морськими суднами використовують стежні гідроприводи з коефіцієнтом підси- лення 105, а у системах автоматики з електрогідравлічним керу- ванням — до 107. Таке велике значення коефіцієнта підсилення досягається завдяки незначній потужності, яка витрачається на ке- рування. Наприклад, потужність вхідного сигналу у гідропідсилю- вачі з електричним керуванням становить 0,5 – 1 Вт, а зусилля для переміщення золотників не перевищує 40 мН.
Стержні гідроприводи залежно від типу гідродвигуна бувають з поступальним, поворотним і обертальним рухом вихідної ланки.
|
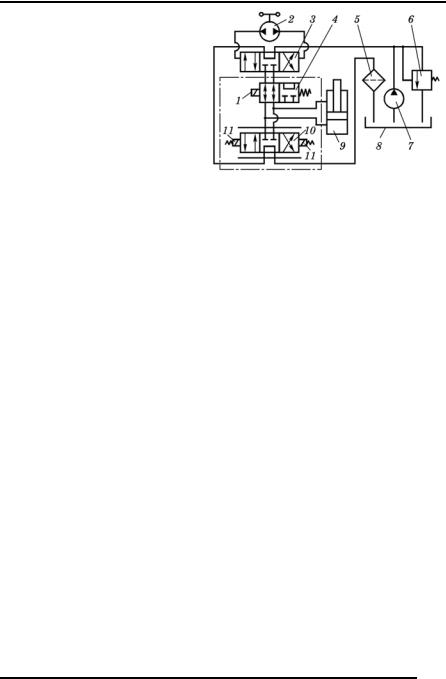
На рис. 9.61 показано схему |
||
|
стежного |
гідроприводу |
поступа- |
|
льного руху, що використаний як |
||
|
гідропідсилювач руля |
ґрунтозмі- |
|
|
шувальної машини. При повороті |
||
|
рульового колеса 1, наприклад за |
||
|
стрілкою |
годинника, |
завдяки |
|
гвинтовій парі 2 золотник 3 дро- |
||
|
селювального гідророзподільника |
||
|
зміститься вліво і сполучить пра- |
||
Рис. 9.61. Схема стежного гідро- |
ву порожнину гідроциліндра 4 з |
||
приводу поступального руху: |
напірним каналом (КН), а ліву — |
||
1 — рульове колесо; 2 — гвинтова |
зі зливним (КЗ). Під дією потоку |
||
пара; 3 — дроселювальний гідрозпо- |
рідини шток гідроциліндра почне |
||
дільник; 4 — гідроциліндр; 5 — кор- |
переміщуватись вліво, повертаю- |
||
пус гідророзподільника; 6 — траверса |
чи шарнірно з’єднану з ним тра- |
||
|
|||
290

Об’ємні гідроприводи
версу 6, а разом із нею і передній коток машини. Поворот котка від- буватиметься доти, поки корпус 6 розподільника, який переміщу- ється разом з траверсою, не зміститься на величину ходу, що дорів- нює зміщенню золотника, і знову не перекриє канали розподільни- ка. Щоб повернути коток у вихідне положення, рульове колесо по- трібно повернути на такий самий кут проти стрілки годинника. Внаслідок цього золотник, поршень, траверса і, отже, корпус розпо- дільника повернуться у вихідне положення. Так відбувається сте- ження котка за поворотом рульового колеса. Коефіцієнт підсилення гідропідсилювача Kг у цьому разі можна виразити співвідношенням
Kг = F/Fз, де F — зусилля, створюване на поршні гідроциліндра, Fз — зусилля, необхідне для переміщення золотника. Важливим
параметром стежного гідроприводу є коефіцієнт передачі, який ви- значається відношенням лінійної або кутової величини переміщен- ня ланки до величини переміщення вхідної ланки. Для наведеної схеми вхідним сигналом на гідропідсилювач руля є переміщення Х золотника, а вихідним — переміщення Y поршня гідроциліндра. Тоді коефіцієнт передачі можна визначити співвідношенням Kп = (a + b)b, де a і b — плечі важеля траверси 6.
Стежний гідропривід гичкозбиральної машини типу БМ-6Б. Взагалі гідропривід машини типу БМ-6Б призначений для автоматичного водіння і ручного коригування машини і опускання різальних апаратів, завантажувального транспортера та очисника головок коренеплодів.
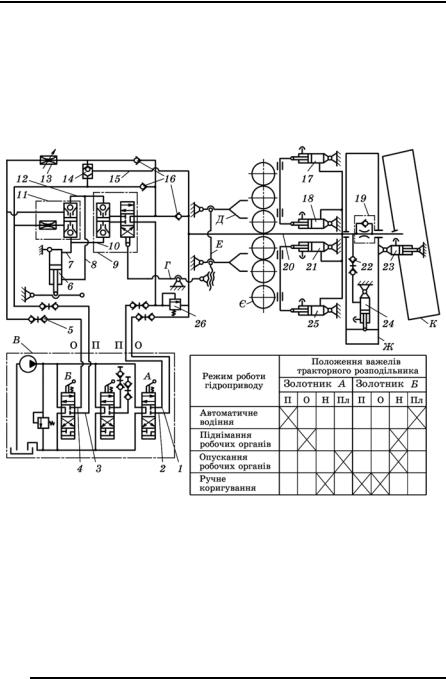
Гідропривід складається із гідросистеми машини і гідросистеми трактора (рис. 9.62.), до якої входять бак, насос, та моноблоковий золотниковий розподільник (на рисунку зображений спрощено, без переливного каналу і лінії керування).
Система автоматичного водіння (САВ) складається з гідроцилін- дра 6, розподільника 9 з гідрозамком, запобіжного клапана 26 і ме- ханічної системи керування розподільником 9 (копір-водіїв Д, попе- речної тяги Е та двоплечого важеля Г). Гідроциліндр 6 шарнірно приєднано до основної рами і причепа машини. Запобіжний клапан 26 відрегульований на тиск спрацювання 3,5 МПа.
Для роботи САВ важіль розподільника трактора золотника А встановлюють в положення «Піднімання», золотника Б — у поло- ження «Плаваюче» (див. таблицю рис. 9.62), а середній золотник в положення «Нейтральне», тоді при нейтральному положенні копір- водіїв Д олива від насоса через золотник А по трубопроводу 1 над- ходить до розподільника 9, золотник якого знаходиться в нейтра- льному положенні, і зливається по трубопроводу 2, а також кла- панах 16 і трубопроводах 3 і 4 в бак.
При поперечному зміщенні копір-водіїв Д сигнал через попереч- ну тягу Е, двоплечий важіль Г передається на золотник розподільни-
291
Розділ 9
ка 9. Той, наприклад, зміщуючись вниз, спрямовує оливу в гідроза- мок, а далі по трубопроводу 7 в поршневу порожнину гідроциліндра 6. Із штокової порожнини цього циліндра олива по трубопроводу 8, через гідрозамок і розподільник, зворотний клапан 16, трубопровід 2, золотник А розподільника трактора надходить на злив. Одночасно олива може надходити на злив через зворотні клапани 16, регульо- ваний дросель 13 по трубопроводах 3, 4 і золотник Б тракторного роз- подільника. Гідрозамок 11 при нагнітанні і зливанні оливи в такому положенні буде запертий. Якщо копір-водій змістить золотник розпо-
Рис. 9.62. Принципова схема гідроприводу гичкозбиральної машини БМ-6Б:
1, 2, 3, 4, 7, 8, 10, 12, 15 і 20 — трубопроводи; 5 — розривна муфта; 6 — гідроци- ліндр автомата водіння; 9 — розподільник із гідрозамком автомата водіння; 11 — гідрозамок; 13 — регульований дросель; 14 — логічний клапан «АБО»; 16 — зво- ротні клапани; 17, 18, 21 і 25 — гідроциліндри піднімання і опускання різальних апаратів; 19 — сповільнювальний клапан; 22 — швидкорознімна муфта; 23 — гідроциліндр піднімання і опускання очисника; 24 — гідроциліндр піднімання і опускання завантажувального конвеєра; 26 — запобіжний клапан; А і Б — відпо- відно правий і лівий золотники моноблокового розподільника трактора; В — гід- росистема трактора; Г — двоплечий важіль; Д — копір-водій; Е — поперечна тя- га; Є — різальний апарат; Ж — завантажувальний конвеєр; К — очисник; П — «Піднімання»; О — «Опускання»; Н — «Нейтральне»; Пл — «Плаваюче»
292

Об’ємні гідроприводи
дільника 9 вгору, то олива від насоса надходитиме в штокову порож- нину гідроциліндра, а зливатись з безштокової. Шток гідроциліндра змістить раму машини в той чи інший бік і вона через двоплечий ва- жіль поверне золотник розподільника 9 в нейтральне положення. Таким чином золотник стежить за роботою гідроциліндра.
Гідропривід ручного коригування САВ призначений для втру- чання оператора в роботу САВ при виході копір-водіїв із міжрядь або при заїзді машини на рядки коренеплодів. Для цього важіль золотника А встановлюють у положення «Нейтральне», а золотника Б — в положення «Піднімання» або «Опускання». У такому разі олива від золотника Б тракторного розподільника надходитиме в порожнини гідроциліндра 6 по трубопроводах 3 і 4 через гідрозамок 11 і трубопроводи 7 і 8. Зворотні клапани 16 будуть закриті. Після коригування важіль золотника Б встановлюють у положення «Пла- ваюче», а важіль золотника А — в положення «Піднімання» і тоді робота САВ відновлюється.
Гідропривід піднімання і опускання різальних апаратів, заван- тажувального конвеєра та очисника здійснюється гідроциліндрами відповідно 17, 18, 21, 25, 23 і 24.
Керування цими гідроциліндрами здійснюється золотником А тракторного розподільника: піднімання при положенні «Опускан- ня» а опускання при положенні «Плаваюче». Важіль золотника Б при цьому повинен бути в положенні «Нейтральне». При підніманні зазначених виконуючих органів олива порожнин гідроциліндрів надходить від золотника А по трубопроводах 2 і 20. При опусканні олива із порожнин гідроциліндрів витискується на злив завдяки ма- сі виконуючих органів по цих самих трубопроводах 20 і 2.
Якщо машина працює на полях з підвищеною вологістю, змен- шують тиск на ґрунт копіювальних коліс рухомих рамок різальних апаратів, зменшивши переріз зливного трубопроводу 4 за допомогою дроселя 13. Швидкорознімну муфту 22 роз’єднують після того, як завантажувальний конвеєр опущений в робоче положення, а при транспортних переїздах з’єднують.
Оскільки гідроприводи ручного коригування і піднімання вико- нуючих органів сполучені трубопроводами 15 і 20, то при поперед- ньому зміщенні рами машини з деяким випереджанням здійсню- ється піднімання виконуючих органів, що виключає їх поломку.
Стежний гідропривід коренезбиральних машин типу КС-6Б, МКК-6 — це гідромеханічна автоматична система (гідропі- дсилювач з зворотним зв’язком) для спрямування машини по ряд- ках, як і САВ машини типу БМ-6Б.
Копір-водій 1 (рис. 9.63.) у вигляді полозка або стрілчастої лапи через важільний механізм 9 з’єднаний із золотником 3 розподіль- ника. Золотник 3 і гідроциліндр 8 керованих коліс утворюють сис- тему гідроприводу з важелем 4 зворотного зв’язку.
293

Розділ 9
Рис. 9.63. Схема гідромеханічної авто- матичної системи спрямування маши- ни по рядках:
1 — копір-водій; 2, 8 — гідроциліндри; 3 — золотник розподільника; 4 — важіль зворот- ного зв’язку; 5 — важільна система рульової трапеції; 6 — кероване (напрямне) колесо; 7 — рама; 9 — важільний механізм
При відхиленні рядка від прямо- лінійного напрямку копір-водій від- хиляється від середнього положення на певний кут і через важільний ме- ханізм 9 зміщує золотник 3. Робоча рідина під тиском надходить від на- соса у певну порожнину гідроцилін- дра 8. Шток гідроциліндра, рухаю- чись, через важільну систему 5 ру-
льової трапеції повертає керовані колеса. При цьому через важіль 4 зворотного зв’язку корпус розподільника переміщується у бік змі- щення його золотника. Поворот коліс відбуватиметься доти, поки золотник і корпус розподільника під дією зворотного зв’язку не зай- муть один відносно одного нейтральне положення.
Для ручного коригування передбачено гідроциліндр 2. Докладніше будову і принцип дії стежних гідроприводів машин
типу КС-6Б, МКК-6 розглянуто у роз. 9 «Гідроприводи рульових ке-
рувань» (див. рис. 9.29, 9.30).
Стежний гідропривід самохідного кукурудзозбирального комбайна типу КСКУ-6 — це також САВ. Система може викорис- товуватись тільки при переміщенні комбайна. Основними елемен- тами САВ є: копіювальні пристрої з диференційними індуктивними датчиками (поворотними трансформаторами), датчики зворотного зв’язку положення керованих коліс, електрокерований трипозицій- ний розподільник, електрокерований двопозиційний відсічний роз- подільник, електронний блок, з’єднувальні кабелі та гідропривід рульового керування комбайна.
Копіювальні пристрої контактні з поворотними трансформато- рами розміщені всередині третього і п’ятого мисів жатки комбайна. Датчик зворотного зв’язку встановлено на мосту керованих коліс. Електронний блок розміщено в кабіні.
Трипозиційний розподільник 10 (рис. 9.64) типу Е6-4ПГ-73-12 призначений для керування потоком оливи, що надходить в гідро- циліндр 9 рульового керування. Працює розподільник 10 так. Коли електромагніти 11 знеструмлені, золотник розподільника знахо- диться в нейтральному положенні і потік оливи, що надходить у розподільник, вільно зливається в бак 8. При вмиканні одного із
294
Об’ємні гідроприводи
Рис. 9.64. Принципова схема гідроприводу САВ-1 кукурудзо- збирального комбайна КСКУ-6:
1, 11 — електромагніти; 2 — насос- дозатор; 3 — розподільник типу ГА-35000А; 4 — відсічний розпо- дільник типу Е5-4ПБГ-73-12; 5 — фільтр; 6 — запобіжний клапан; 7 — насос НШ-10Е-Л; 8 — гідро- бак; 9 — гідроциліндр рульового керування; 10 — розподільник типу Е6-4ПГ-73-12
електромагнітів золотник зміщується у крайнє положення. Потік оливи спрямовується в одну із порожнин гідроциліндра 9. Оскільки електромагніти вмикаються імпульсно, то розподільник спрямовує оливу у гідроциліндр незначними порціями, що забезпечує плав- ність повороту керованих коліс.
Двопозиційний відсічний розподільник 4 типу Е5-4ПБГ-73-12 призначений для блокування вихідних каналів розподільника 3 гідроприводу рульового керування. Живлення на обмотку електро- магніта 1 подається при вмиканні тумблера САВ. В положенні «Ви- мкнено» в розподільнику 4 канали сполучають порожнини гідроци- ліндра 9 з каналами розподільника 3 і гідропривід рульового керу- вання працює аналогічно гідроприводу комбайна СК-5М «Нива». В положенні «Ввімкнено» канали розподільника і порожнини гідро- циліндра закриті.
Працює САВ так. Заїзд в рядки і керування комбайном перші 10 – 15 м виконують вручну при вимкненій САВ. Після того, як рух комбайна стабілізується, не зупиняючи його, тумблер на панелі електронного блока переводять в положення «Ввімкнено». Ручне рульове керування при цьому вимикається. При відхиленні при- ймальних русел жатки комбайна від рядків стебел кукурудзи і ме- ханічній дії стебел на копіювальні пристрої на виході диференцій- них датчиків виробляється сигнал, амплітуда якого пропорційна величині відхилення, а фаза залежить від напрямку відхилення. Цей сигнал надходить в електронний блок, де він фільтрується і підсилюється. Тут же формується командний сигнал на вмикання певного електромагніту розподільника 10, золотник якого спрямо- вує потік оливи в одну із порожнин гідроциліндра 9. Керовані коле- са повертаються.
Колеса повертаються доти, поки сигнал на виході датчика зворот- ного зв’язку, величина якого пропорційна куту повороту коліс, не зрівняється із сигналом, що надійшов в електронний блок. Керовані колеса поступово повертаються у вихідне положення.
295