


4. Момент силы относительно центра и оси
4. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ЦЕНТРА И ОСИ
4.1. Момент силы
Момент силы F относительно центра О полностью определяется векторным произведением между радиус-вектором rА, соединяю-
щим центр О с точкой приложения силы А, и вектором силы F :
|
|
|
|
|
|
|
|
|
О (F |
)= rА ×F |
. |
|
(4.1) |
||||||
|
|
|
|
|
|
M |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
О. |
|
|||||
Вычислим модуль вектора момента M |
|
||||||||||||||||||
|
|
|
О (F |
) |
|
|
|
|
|
|
= rАF sinα = F h, |
||||||||
|
M |
= |
rА × F |
|
|||||||||||||||
|
|
(рис. 4.1). |
|
||||||||||||||||
где h = rA · sinα – плечо силы F |
|
||||||||||||||||||
Если радиус-вектор |
|
|
|
||||||||||||||||
rА и вектор силы F |
заданы декартовыми |
||||||||||||||||||
прямоугольными координатами: rА{xА, yА, zА} |
|
|
|
|
|
{Fx , Fy , Fz }, то век- |
||||||||||||||||||||||||||||
и F |
||||||||||||||||||||||||||||||||||
|
|
О (F |
) (4.1) будет иметь вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
тор M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О (F |
)= rА ×F |
|
|
|
i |
|
|
j |
|
k |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
= |
xA y A zA |
= |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
M |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fx |
Fy |
Fz |
|
|
|
|
|
|
|
|||||||||
|
= |
|
(y A Fz − z A Fy )+ |
|
(z A Fx − x A Fz )+ |
|
(x A Fy − y A Fx ). |
|||||||||||||||||||||||||||
|
i |
j |
k |
|||||||||||||||||||||||||||||||
|
Тогда (4.1) запишется |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
О (F |
)= rА ×F |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
M |
= mx |
i |
+my |
j |
+mz |
k |
, |
||||||||||||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
mx = (yA Fz − zA Fy ); my = (zАFx − xАFz ); |
|
|
mz = (xАFy − yАFx ). |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
81 |
||||||

И. В. Богомаз. Механика
Рис. 4.1
Слагающие mx, my, mz называют моментами силы F {Fx , Fy , Fz }
относительно осей Ox, Oy, Oz соответственно (рис. 4.1). Тогда модуль момента MО будет равен:
MО = mx2 + m2y + mz2 .
Направление вектора M O определяется направляющими косинусами
|
|
|
m |
|
|
|
|
my |
|
|
|
m |
|
|
cos (x, MО )= |
x |
, cos (y, MО )= |
, cos (z , MО )= |
z |
. |
|||||||||
MО |
MО |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
MО |
|||||
В частном случае, когда вектор силы распложен в плоскости Oxy (плоская система сил), т. е. F {Fx , Fy }, rА{xA , yA}, тогда
MО (F )= rА ×F = mx i + my j + mz k = mz k .
Здесь уместно сказать несколько слов относительно различных обозначений произведений двух векторов10. В табл. 4.1 показано, что по историческим и национальным обстоятельствам эти обозначения, к сожалению, различаются.
10 Зоммерфельд А. Механика. М. : Иностр. лит, 1947. 389 с.
82

4. Момент силы относительно центра и оси
Таблица. 4.1
Наименование |
В данной |
А. Зоммерфельд |
В. Гиббс |
О. Хивисайт |
||||||||||||||||
|
книге |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Скалярное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(a b ) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
a b |
a b |
||||||||||||||
a b |
||||||||||||||||||||
произведение |
||||||||||||||||||||
Векторное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Va b |
||||||||
a ×b |
|
|
a ×b |
|||||||||||||||||
произведение |
|
|
||||||||||||||||||
a b |
||||||||||||||||||||
Великий термодинамик В. Гиббс (1839–1903) составил для своих студентов краткий очерк векторного анализа, в то время еще мало известного. Обозначения, введенные в этом очерке, применяются большинством американцев, англичан и русскими. Введение О. Хивисайтом (1850–1925) обозначения векторного произведения, в котором V означает начальную букву слова «вектор», было после этого оставлено.
4.2. Приведение силы к заданному центру
Теорема. Сила F , приложенная в произвольной точке тела A, эквивалентна силе, перенесенной в другую точку B параллельно самой себе и присоединенной паре, момент которой M B = F AB.
Доказательство. Пусть имеем силу F ' , приложенную к твердому телу в точке А в плоскости П (рис. 4.2).
Рис. 4.2
83

И. В. Богомаз. Механика
В соответствии с аксиомой статики № 2 приложим в точку В, выбранной за центр приведения, равновесную систему сил (систему двух равных по модулю, но противоположных по направлению сил) F и F′′ , параллельных и равных заданной силе F ' . Тогда система
сил F ' и F′′ составят пару сил, которую назовем присоединенной парой, модуль момента которой равен M B = F AB, где AB – минимальное расстояние между линиями действия силы F ' и F .
Теорема Пуансо. Любая произвольная система сил, приложенных к твердому телу, эквивалентна системе, состоящей из одной силы (главного вектора R ), приложенной в точке приведения О, и одной пары, момент которой называют главным моментом системы сил относительно точки приведения.
N
R = ∑Fi – главный вектор системы;
i=1
N
M O = ∑M O (Fi ) – главный момент системы.
i=1
Здесь i =1,…, N , N – число сил системы.
Пример 4.1. Дана произвольная система сил, приложенная к прямоугольнику (рис. 4.3, а) высотой 2a, шириной 3a, a = 80 см. Модули сил составляют: F1 = F2 = 6 Н, F3 = 3 Н. Вычислить модули главного вектора R и главного момента MO относительно центра приведения О, который лежит на пересечении диагоналей.
а |
б |
Рис. 4.3
84

4. Момент силы относительно центра и оси
Решение. Совместим прямоугольную систему координат Oxy с заданным центром приведения. Перенесем каждую силу параллельно самой себе в точку приведения О, одновременно добавляя присоединённые пары от каждой силы (рис. 4.3, б)
m1 = −F1 1,5a, m2 = F2 a, m3 = −F3 1,5a.
Вычислим главный вектор R :
Rx = ∑Fix = F2 = 6 Н; Ry = ∑Fiy = F1 − F3 = 6 −3 = 3 Н;
R = Rx2 + Ry2 = 62 +32 = 45 = 6, 71 Н.
Направление главного вектора R в плоскости действия сил определим по направляющему косинусу (рис. 4.3):
cosθ = cos (x, R) = RRx = 6,671 = 0,894 → θ = arccos 0,894 = 26°35′.
Вычислим главный момент MO как алгебраическую сумму моментов присоединенных пар. Система сил плоская, следовательно, все присоединенные пары будут расположены в одной плоскости Oxy
(рис. 4.3, б).
Имеем
M О = ∑mOi (Fi ).
С учетом направлений дуговых стрелок присоединённых пар имеем (рис. 4.3, б)
MO = ∑MO (Fi )= −m1 + m2 −m3 =
=−F1 1,5a + F2 a − F3 1,5a =
=−6 1,5 0,8 +6 0.8 −3 1,5 0,8 = −7,2 +4,8 −3,6 = −6 Н м.
85
И. В. Богомаз. Механика
Рис. 4.4
Полученный знак главного момента означает, что дуговая стрелка, определяющая направление поворота, направлена по часовой стрелке (рис. 4.4).
Ответ: R = 6,71 Н, MO = 6Н м.
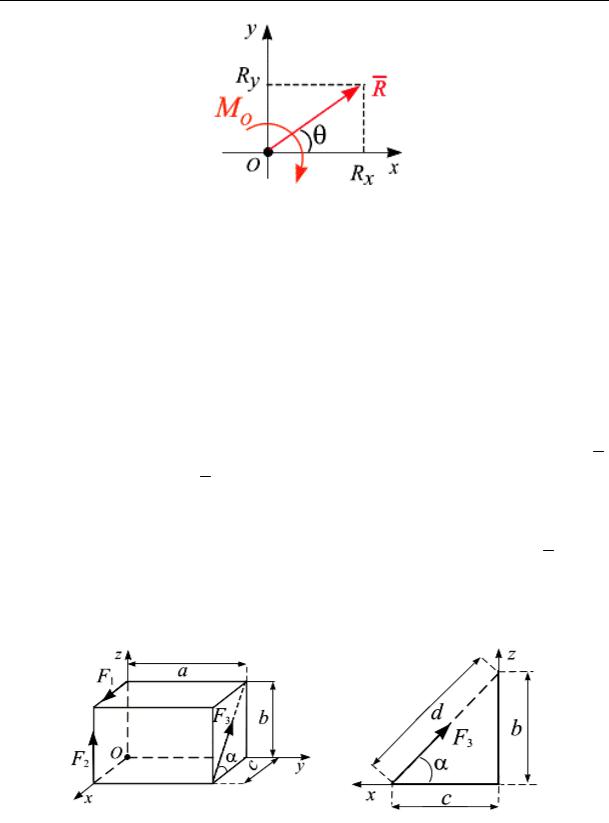
Пример 4.2. Дана произвольная система сил, приложенная к твердому телу (рис. 4.5, а). Модули сил составляют: F1 = F2 = 54 кН, F3 = 2 кН. Вычислить направления и модули главного вектора R и главного момента MO относительно центра приведения О, если
размеры a = 4 м, b = 2 м, c = 3 м.
Решение. Рассмотрим геометрию задачи (рис. 4.5, б). Вычислим тригонометрические функции угла α – угол приложения силы F4 .
а |
б |
Рис. 4.5
86

4. Момент силы относительно центра и оси
Диагональ боковой грани треугольника
d = |
c2 +b2 = |
9 + 4 = 13 ≈ 3,6, |
||||||||
тогда |
|
|
|
|
|
|
|
|
||
sin α = |
b |
= |
2 |
= 0,55; |
cosα = |
c |
= |
3 |
= 0,83. |
|
d |
3,6 |
d |
3,6 |
|||||||
|
|
|
|
|
|
|||||
Вычислим главный вектор системы сил:
R = Rx i + Ry j + Rzk ,
где
Rx = ∑Fix = F1 − F3 cos α = 5 + 2 0,83 = 6,66 кН;
Ry = ∑Fiy = 0 ;
Rz = ∑Fiz = F2 + F3 sin α = 5 + 2 0,55 = 6,1 кН.
Главный вектор заданной системы сил имеет вид
R = 6,66i + 6,1k .
Модуль главного вектора
R = R2 |
+ R2 |
+ R2 |
= (6,66)2 + 0 + (6,1)2 |
= 9,03 кН. |
x |
y |
z |
|
|
Направление главного вектора R вычислим по направляющим косинусам (рис. 4.6, а)
cos α = cos (x, R) = RRx = 6,9,6603 = 0,74 → α = arccos 0,74 = 43°.
Вычислим главный момент MО:
MО = mx i + my j + mz k .
87

И. В. Богомаз. Механика
При вычислении моментов относительно осей учитываем, что момент силы относительно оси равен нулю, если линия действия этой силы параллельна оси или пересекает её.
Имеем (рис. 4.6, б)
mx = ∑mxi (Fi )=F3a sin α = 2 4 0,55 = 4,4 кН м;
my = ∑myi (Fi )= F1 b − F2 c − F3 csin α =
= 5 2 + −5 3 − 2 0,55 3 = −8,3 кН м;
mz = ∑mzi (Fi )= a F4 cosα = 4 2 0,83 = 6,64 кН м.
Главный момент заданной системы сил имеет вид
MО = 4,4i −8,3 j + 6,64k .
Модуль главного момента
MО = mx2 + my2 + mz2 = (4,4)2 +(−8,3)2 +(6,64)2 =11,5 кН м.
а |
б |
Рис. 4.6
88