


И. В. Богомаз. Механика
Измеряем модуль равнодействующей R и угол между осью x и R . Сравниваем полученные результаты.
6.2. Условия равновесия системы сходящихся сил
Аналитическое условие равновесия. Пусть на абсолютно твер-
дое тело действует система сходящихся сил. Тогда для равновесия этой системы сил необходимо и достаточно, чтобы равнодействую-
щая системы R была равна нулю, т. е.
R = ∑Fi = 0.
Это условие равновесия в векторной форме. В проекциях на оси декартовых координат условия равновесия системы сил представляют так:
Rx = ∑Fix = 0; Ry = ∑Fiy = 0; Rz = ∑Fiz = 0,
т. е. для равновесия системы сходящихся сил необходимо и достаточно, чтобы сумма проекций всех сил на каждую из осей координат была равна нулю. (Для плоской системы сил в проекциях будут только два условия равновесия). Например, аналитическое условие равновесия системы сил на рис. 6.6, а имеет вид
а |
б |
Рис. 6.6
124
|
|
|
|
6. Система сходящихся сил |
|
|
F |
= 0, |
S2 + S1 cos 78°− S3 cos 50°− Sn = 0; |
Rx = 0, |
∑ ix |
|
||
|
→ |
F |
= 0. |
→ |
Ry = 0, |
|
S1 sin 78°+ S3 sin 50°− P = 0. |
||
|
∑ iy |
|
|
|
Геометрическое условие равновесия системы сходящихся сил. Для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный на этих силах, как на сторонах, был замкнутым. Построим силовой многоугольник для системы сил (рис. 6.6, а).
Из точки С (рис. 6.6, б) проводим прямую, параллельную линии действия силы S1, и откладываем отрезок вдоль этой линии, равный модулю этой силы, далее через его конец проводим прямую, параллельную линии действия силы S2 (угол между линиями действия сил S1
иS2 равен 78°) и откладываем на ней отрезок, равный модулю силы S2,
ит. д. Если силы S1, S2, S3 … Sn в равновесии, то силовой многоугольник получится замкнутым.
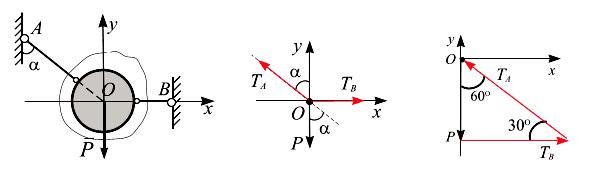
Пример 6.1. Шар весом Р =10 кН подвешен на нерастяжимой нити в точке А и удерживается горизонтальной нерастяжимой нитью, привязанной в точке В, угол α = 60 (рис. 6.7, а). Вычислить реакции связей.
Решение. Выделим шар, отбросим связи и заменим их силами натяжения TA и TB (рис. 6.7, а, б). Тогда на шар будут действовать три силы: вес Р (внешняя сила) и две реакции связей. Все силы пересекаются в точке О (центр шара) и лежат в одной плоскости (рис. 6.7, б).
а |
б |
в |
Рис. 6.7
125

И. В. Богомаз. Механика
Совместим прямоугольную систему координат с точкой О и запишем условия равновесия:
∑Fix = 0, |
−TA sin α +TВ = 0, |
|
|
→ |
TA cos α − P = 0. |
∑Fiy = 0. |
|
|
Решая полученную систему уравнений, имеем
T = |
P |
|
= |
10 |
= 20 |
кН, T = |
P sin α |
= 5 0,87 =8,7 кН. |
|
|
|
|
|||||
A |
cos |
α |
0,5 |
|
В |
cos α |
0,5 |
|
|
|
|
||||||
Проверим полученный результат графически. Строим силовой многоугольник (рис. 6.7, в). Совмещаем начало системы координат с точкой пересечения линий действия сил, т. е. с точкой О. Из точки О проводим прямую, параллельную линии действия вектора силы Р, и откладываем на ней 5 масштабов, затем через начало и конец вектора Р проводим прямые, параллельные линиям действия TA и TВ до их
пересечения между собой. Силовой многоугольник, составленный из этих сил, замкнутый; равнодействующая этих сил равна нулю; силы Р, TA и находятся в равновесии. Измерив стороны построенного си-
лового треугольника в масштабе силы Р, определим реакции TA и TB. Подтвердим полученный результат теоремой синусов:
|
|
|
P |
= |
|
|
TВ |
= |
TA |
|
, |
||
откуда |
|
|
sin 30° |
|
sin 60° |
sin 90° |
|||||||
|
|
|
|
|
|
||||||||
P |
|
|
|
|
|
|
|
P sin 60° |
= 5 0,87 =8,7 . |
||||
T = |
= 2P , |
|
T |
|
= |
||||||||
|
|
|
|
||||||||||
A |
sin 30° |
|
|
|
|
В |
|
sin 30° |
|
0,5 |
|||
|
|
|
|
|
|
|
|
|
|||||
Ответ: TA = P = 20 кН, TB = 8,7 кН.
Пример 6.2. На нерастяжимой нити АВС в её середине подвешен груз весом Q. Точки А и С, расстояние между которыми , находятся на горизонтальной прямой (рис. 6.8, а).
Смещение точки В от прямой АС равно z. Вычислить натяжение нити в зависимости от отношения 2 / z .
126

6. Система сходящихся сил
а |
б |
в |
Рис. 6.8
Решение. Рассмотрим геометрию задачи. Из ∆AOB (рис. 6.8, б) вычислим гипотенузу АВ и тригонометрические функции угла α, как
функции аргумента |
/ z : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB = |
z |
2 |
|
|
|
2 |
|
|
|
2z 2 |
|
|
|
|||||||
|
+ |
|
|
= |
|
|
|
|
+1; |
|
|
|||||||||
|
|
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||
sin α = |
AO |
= |
|
|
|
|
|
|
2 |
|
|
|
|
= |
|
1 |
|
|
; |
|
AB |
|
|
|
|
2z |
2 |
|
|
|
2z |
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
2 |
|
+1 |
|
|
+1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
cos α = |
z |
|
= |
|
|
|
|
2z |
|
. |
|
|
|
||||||
|
AB |
|
|
|
|
2z |
+1 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим равновесие узла В: вырежем узел (рис. 6.8, в), отбросим связи, заменим отброшенные связи реакциями. Силы натяжения TA, TC (реакции связей) направлены вдоль нитей АВ и ВС к точкам подвеса А и С. Совместим прямоугольную систему координат с точкой В. Запишем условия равновесия аналитически и решим полученные уравнения:
∑Fx = 0, (−TA +TС )sin α = 0 →TA =TС ≡T;
127