

- •ПРЕДИСЛОВИЕ
- •ВВЕДЕНИЕ
- •1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ ИЗ МАТЕМАТИКИ
- •1.1. Прямоугольная декартова система координат
- •1.2. Понятие об абсолютно твердом теле и его степенях свободы
- •1.3. Элементы тригонометрии
- •1.4. Векторы
- •1.5. Инерциальная система отсчета
- •2. СТАТИКА
- •2. 1. Аксиомы статики
- •2.2. Теорема о переносе вектора силы вдоль линии действия
- •3. СИСТЕМА ПАРАЛЛЕЛЬНЫХ СИЛ
- •3.1. Приведение к равнодействующей системы параллельных сил, направленных в одну сторону
- •3.2. Приведение к равнодействующей двух сил, направленных в разные стороны
- •3.3. Пара сил
- •3.4. Правило рычага. Момент силы относительно точки
- •3.5. Распределенные силы
- •4. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ЦЕНТРА И ОСИ
- •4.1. Момент силы
- •4.2. Приведение силы к заданному центру
- •4.3. Условия равновесия произвольной пространственной системы сил
- •4.4. Условия равновесия произвольной плоской системы сил
- •4.5. Вычисление реакций опор конструкций арочного типа
- •5. ЦЕНТР ТЯЖЕСТИ
- •5.1. Центр параллельных сил
- •5.2. Центр тяжести твердого тела
- •5.3. Центр тяжести плоского сечения
- •5.4. Центры тяжести простейших тел
- •5.5. Методы вычисления центров тяжести тел
- •6. СИСТЕМА СХОДЯЩИХСЯ СИЛ
- •6.1. Приведение к равнодействующей силе
- •6.2. Условия равновесия системы сходящихся сил
- •6.3. Равновесие твердого тела под действием трех сил
- •7. КИНЕМАТИКА ТОЧКИ
- •7.1. Траектория, скорость, ускорение
- •7.2. Движение точки в плоскости
- •7.3. Простейшие движения твердого тела
- •8. ДИНАМИКА
- •8.1. Основные законы движения материальной точки
- •8.2. Две основные задачи динамики точки
- •8.3. Теорема об изменении кинетической энергии
- •8.4. Принцип возможных перемещений
- •8.5. Принцип Д’Аламбера. Силы инерции
- •9. ДЕФОРМИРУЕМОЕ ТВЕРДОЕ ТЕЛО
- •9.1. Общие сведения
- •9.2. Классификация нагрузок
- •9.3. Метод сечений. Виды сопротивлений бруса. Построение эпюр
- •10. ПОНЯТИЕ О НАПРЯЖЕНИИ И ДЕФОРМАЦИИ
- •10.1. Напряженное состояние в точке
- •10.2. Интегральные зависимости между внутренними силовыми факторами и напряжениями
- •10.3. Деформации и перемещения. Деформированное состояние в точке
- •11. ОСЕВОЕ РАСТЯЖЕНИЕ И СЖАТИЕ В ПРЕДЕЛАХ УПРУГОСТИ
- •11.1. Основные понятия и зависимости. Условия прочности
- •11.2. Перемещения. Эпюра перемещений. Условие жесткости
- •11.3. Расчеты на прочность и жесткость
- •12. ПЛОСКИЕ СТЕРЖНЕВЫЕ ФЕРМЫ
- •12.1. Общая характеристика и классификация ферм
- •12.2. Методы расчета плоских ферм
- •13. ИЗГИБ БРУСА
- •13.1. Поперечный изгиб
- •13.2. Расчеты на прочность при изгибе
- •13.3. Перемещения при изгибе
- •13.4. Расчет балок на жесткость
- •14. ВНЕЦЕНТРЕННОЕ СЖАТИЕ ИЛИ РАСТЯЖЕНИЕ
- •14.1. Определения. Условия прочности
- •14.2. Ядро сечения
- •15. УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ
- •15.1. Понятие об устойчивости
- •15.2. Продольный изгиб. Потеря устойчивости
- •15.3. Формула Эйлера для вычисления критической силы шарнирно закрепленного стержня
- •15.5. Критическое напряжение. Гибкость стержня
- •15.6. Продольный изгиб за пределом пропорциональности. Формула Ясинского
- •15.7. Диаграмма критических напряжений
- •15.8. Принципы рационального проектирования сжатых стержней
- •ОГЛАВЛЕНИЕ

12. Плоские стержневые фермы
12. ПЛОСКИЕ СТЕРЖНЕВЫЕ ФЕРМЫ
12.1. Общая характеристика и классификация ферм
Стержневыми системами называются системы, состоящие из отдельных стержней, т. е. таких элементов, у которых один размер (длина) значительно превышает два других, соединенных между собой в узлах с помощью сварки, заклепок, болтов или других скреплений.
Фахверк (нем. Fachwerk – ферма) – тип строительной конструкции, при котором несущей основой служит пространственная секция из диагональных (под различным углом) балок из древесины хвойных пород – стержневая конструкция (рис. 12.1). Конструктивно это кар- кас-рама из вертикальных, горизонтальных и косо поставленных балок: архитектурный и строительный термин, вошедший в русский язык с XVIII в. как способ строительства, а также сама постройка.
В большинстве случаев соединения стержней в узлах являются жесткими – не шарнирными. Точный расчет стержневых систем с такими узлами сложен и рассматривается в курсах строительной механики и строительных конструкций. В нашу задачу входит рассмотреть простейшие стержневые конструкции со стержнями, шарнирно соединенными в узлах.
Рис. 12.1
257
И. В. Богомаз. Механика
Сооружение должно быть геометрически неизменяемым, т. е. постоянно сохранять ту геометрическую форму, которая ему задана при возведении.
Фермой называется стержневая система, остающаяся геометрически неизменяемой после условной замены ее жестких узлов шарнирными.
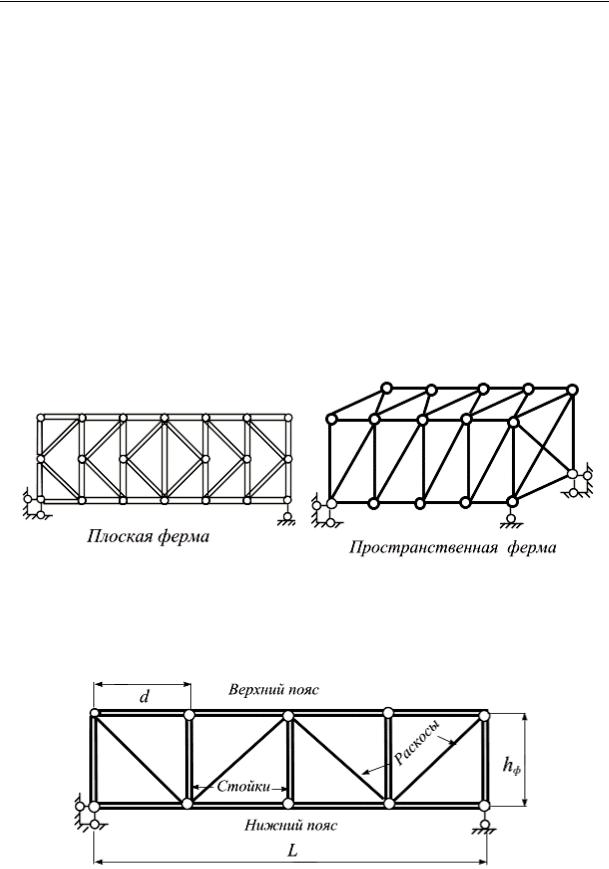
Фермы бывают плоскими (рис. 12.2, а) (все стержни лежат в одной плоскости) и пространственными (рис. 12.2, б).
Основными элементами ферм являются пояса, образующие контур фермы, и решетка, состоящая из раскосов и стоек (рис. 12.3)
Расстояние между узлами пояса называют панелью d, расстояние между опорами – пролетом l, расстояние между осями поясов – высотой фермы hф.
а |
б |
Рис. 12.2
Рис. 12.3
258

12. Плоские стержневы е фермы
Установ им зависимость между числом узлов и числом стержней, необходимых для получения простейшей фермы. Всякий новый узел, добавляемый в процессе образования геом етрически неизменяемой системы, может быть присоединен с помощью двух стержней, оси которых не должны лежать на одной прямой. Следовательно, системы, полученные из шарнирного треугольника путем последовательного присоединения узлов, причем каждогодвумястержнями, нележащимина однойпрямой, геометрически неизменяемы. Такиеферм ыназываютсяпростейшими.
Обозначим: S – число стержней такой фермы, k – число ее узлов. Осно вной треугольник имеет три узла и три стержня (рис. 12.4 ); каждый из остальных присоединяемых узлов в количестве k – 3 прикрепляется двумя стержнями. Поэтому полное число стержней в простейшей геометрически неизменяемой фер ме S = 3 + 2(k – 3) или S = 2k –3.
Если число стержней S < 2k–3, то это показывает, что ферма в своем составе не имеет минимального коли чества стержней, необ-
ходим ого |
для |
образования |
геометрически неизменяемой системы. |
|
Следовательно, |
в |
этом случае система геометрически изменяема. |
||
Примером |
такой |
системы |
служит четырехугольник (рис. 12.5, а), |
|
в котором S = 4, k = 4, следовательно, S = 4 < 2k – 3 = 2 × 4 – 3 = 5. Превращение его в геометрически неизм еняему ю систем у мо-
жет быть достигнуто включением пятого диагонального стержня (рис. 12.5, б). Если далее введем втору ю диагональ – шестой стержень (рис. 12.5, в), то с точки зрения геометрической неизменяемости этот стержень будет лишним.
Рис. 12.4
а |
б |
в |
Рис. 12.5
259
И. В. Богомаз. Механика
Соотнош ение S ≥ 2k – 3 является необходимым, но недостаточным у словием неизменяемости фермы. Так фермы, изображен ные на рис. 12.6, геометрически изменяемы, несмотря на то, что число стержней S ≥ 2k – 3. Изменяемость этих ферм объясняется тем, что правые их части представляют собой шарнирны е четырехугольники.
Фермы, образованные из шарнирного треугольника путем последовательного присоединени я узлов (с помо щью двух стержней, не лежа щих на одной прямой), называются простейшими.
На рис. 12.7 представлен ы два стержневых сооружения, получившие золотые медали на выставке в Париже в 1900 г. – Эй фелева башня и мост через р. Енисей архитектора Л. Д. Проскурякова.
Стержневая конструкция будет статически определима лишь в том случае, когда на нее нал ожено три опорные связи .
Рис. 12.6
Рис. 12.7
260