


4. Момент силы относительно центра и оси
Направление вектора главного момента заданной системы сил вычисляется по направляющим косинусам (рис. 4.6, б):
cos (x, M |
O )= |
|
|
mx |
= |
0, 44 |
= 0,04; |
|||||||
|
MО |
11,5 |
||||||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
my |
|
|
|
|
|
8,3 |
|
|
cos (y, MО )= |
|
|
|
= − |
= 0,72; |
|||||||||
|
MО |
|
11,5 |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||
cos (z , M |
О )= |
|
|
mz |
|
= |
6,64 |
= 0,58. |
||||||
|
|
MО |
|
11,5 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
Ответ: R = 9,03 кН, MO = 11,5 кН м.
4.3. Условия равновесия произвольной пространственной системы сил
Для равновесия системы сил, приложенных к абсолютно твердому телу, необходимо и достаточно, чтобы главный вектор сил был равен нулю и главный момент системы сил относительно любого центра приведения также был равен нулю:
R = ∑Fi = 0, MO = ∑MO (F )i .
Из векторных уравнений следует шесть скалярных уравнений равновесия:
∑Fix = 0, |
∑Fiy = 0, |
∑Fiz |
= 0, |
|
|
|
∑mzi (Fi )= 0. |
∑mix (Fi )= 0, ∑myi (Fi )= 0, |
|||
|
|
|
|
Пространственная заделка. Пример пространственной жесткой заделки представлен на рис. 4.7. Рассмотрим пример вычисления реакций пространственной заделки для ломаного бруса. Совместим систему координат Oxyz с точкой О (рис. 4.7, а).
89
И. В. Богомаз. Механика
а |
б |
Рис. 4.7
Ломаный брус нагружен силами F1 
 Oz, F2
Oz, F2 
 Ox, F3
Ox, F3 
 Oy. Про-
Oy. Про-
странственная жесткая заделка лишает ломаный брус всех шести степеней свободы, которыми обладает абсолютно твердое тело в пространстве: перемещения в трех ортогональных направлениях и вращение в каждой из плоскостей.
Используя аксиому связей, отбросим заделку и заменим ее ше-
стью реакциями связей: xO, yO, zO, и mOx, mOy, mOz (рис. 4.7, б). Составим уравнения равновесия пространственной системы сил:
∑Fix = 0, xO − F2 = 0 xO = F2 ;
∑Fiy = 0, yO + F3 = 0, yO = −F3;
∑Fiz = 0, zO − F1 = 0, zO = F1;
∑mOx (Fi )= 0, mOx − F1 4 = 0, mOx = F1 4;
∑miy (Fi )= 0, mO y + F1 5 + F2 2 = 0, mO y = −(F1 5 + F2 2);
∑miz (Fi )= 0, mOz + F3 5 + F2 4 = 0, mOz = −(F3 5 + F2 4).
90

4. Момент силы относительно центра и оси
4.4. Условия равновесия произвольной плоской системы сил
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций этих сил на любые две ортогональные оси (например, оси Ox и Oy) были равны нулю и сумма моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равна нулю:
∑Fix = 0, ∑Fi y = 0, ∑M A (Fi ) = 0.
Точка А называется точкой приведения, или моментной точкой.
Жесткое закрепление (заделка). В балках с заделанным концом
(консоли) может быть только неподвижно-плоское закрепление, т. е. жесткое закрепление (рис. 4.8, а). Такое закрепление не допускает ни линейных, ни угловых перемещений опорного сечения. В этой опоре возникают вертикальная VA, горизонтальная HA составляющие опорной реакции и реактивный момент MR или MA.
а |
б |
в
Рис. 4.8
91

И. В. Богомаз. Механика
Закрепление с тремя связями может быть также представлено тремя стержнями, не пересекающимися в одной точке (рис. 4.8, в). Это опоры с тремя связями. Возможность поворота около точки пересечения двух стержней устраняется наличием третьего стержня. Такая схема характеризует полную неподвижность бруса под действием внешних сил.
При вычислении реакций в заделке за моментную точку выбирают точку закрепления консоли (точка А на рис. 4.8, а).
Пример 4.3. Балка АВ нагружена |
парой сил с моментом |
m = 6 кН·м, силой P = 12 кН, длина балки 2 |
= 4 м, α = 60° (рис. 4.9, а). |
Вычислить реакции в консольной балке. |
|
а
б
Рис. 4.9
Решение. Применив метод сечения, рассмотрим равновесие балки АВ. Отбросим связи и заменим их соответствующими реакциями
(рис. 4.8, б).
Разложим силу Р на Px = P cos α и Py = P sin α. Запишем уравнения равновесия и решим их.
∑Fi x = 0, H A − Px = 0 → H A = Px = P cos α =12cos 60° =12 0,5 = 6 кН;
∑Fi y = 0, VA − Py = 0 →VA = Py = P sin α =12sin 60° =12 0,87 =10, 44 кН;
∑M А = 0, M R + m − Py 2 = 0 → M R = −m + P sin α 2 =
= −6 +12 sin 60° 4 = −6 + 48 0,87 = 35,76 кН м.
92

4. Момент силы относительно центра и оси
Проверка:
∑M B = M R −VА 2L + m = 35,76 −10,44 2 2 +6 = 0.
Ответ: HA = 6 кН; VA = 10,44 кН; MR = 35,76 кН м.
Пример 4.4. Балка АВ нагружена равномерно-распределенной нагрузкой q = 6 кН/м, длина балка =1 м (рис. 4.10, а). Вычислить
реакции в консольной балке.
а
б
Рис. 4.10
Решение. Применим метод сечения, отбросим связи и заменим их соответствующими реакциями, рассмотрим равновесие балки АВ
(рис. 4.10, б).
Распределенную нагрузку интенсивностью q заменим равнодействующей:
Q = q 4 = 6 4 1 = 24 кН.
Запишем уравнения равновесия и решим их:
∑M А = 0, −Q (2 +3 ) + MR = 0 → M R = Q (2 +3 ) =
=5Q = 5 24 1 =120 кН м.
∑Fi y = 0, RA −Q = 0 → RA =Q = 24 кН.
93
И. В. Богомаз. Механика
Проверка:
∑M B = M R − RA 7a +Q 2a =120 −24 7 1+ 24 2 1 = 0.
Ответ: RA = 15,3 кН; MR = 73,9 кН м.
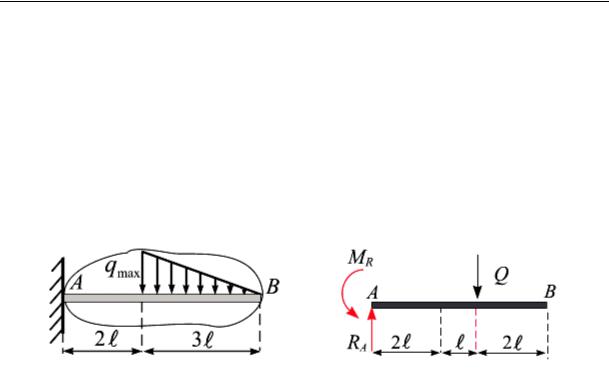
Пример 4.5. Вычислить реакции в консольной балке (рис. 4.11, а). Дано: qmax = 16 кН/м, = 2 м.
а |
б |
Рис. 4.11
Решение. Применив метод сечения, отбросим связи и заменим их соответствующими реакциями. Рассмотрим равновесие балки АВ (рис. 4.11, б). Распределенную нагрузку заменим сосредоточенной силой Q:
Q = 12 qmax = 12 16 2 =16 кН.
Линия действия сосредоточенной силы Q делит отрезок, равный
3a в соотношении |
1 |
3 |
|
: |
2 |
3 |
|
(рис. 4.11, б). |
|
3 |
|
|
|
3 |
|
|
|
Запишем уравнения равновесия и решим их.
∑M A = 0, −Q(13 3 + 2 ) + MR = 0 → MR = Q(13 3 +2 ) =
=16(2 + 2 2) = 96 кН м.
∑Fi y = 0, RA −Q = 0 → RA =Q =16 кН.
94

4. Момент силы относительно центра и оси
Проверка:
∑M B = M R − RA 5 +Q 2 = 96 −16 10 +16 4 = 0.
Ответ: RA = 16 кН, MR = 96 кН м.
Для вычисления реакций в шарнирно опертых балках выбирают две моментные точки (часто шарниры А и В) и записывают сумму моментов сил относительно этих точек, за третье уравнение равновесия выбирают сумму проекций сил на ось, не перпендикулярную прямой, соединяющей точки А и В, т. е. уравнения равновесия имеют вид
∑M А (Fi )= 0, ∑M B (Fi )= 0, ∑Fix = 0.
В общем случае за точки приведения принимают точки пересечения линий действий реакций опор.
Пример 4.6. Дано: P = 10 кН, q = 4 Н/м, = 6 м, α = 30°. Вы-
числить реакции опор балки АВ, опертой на шарнирно-подвижную и шарнирно-неподвижную опоры, нагруженной как показано на рис. 4.12, а.
Решение. Используя метод сечения, отбросим связи и заменим их соответствующими реакциями опор (рис. 4.11, б).
а
б
Рис. 4.12
95

И. В. Богомаз. Механика
Распределенную нагрузку интенсивностью q заменим равнодействующей: Q = q 2 = 4 62 =12 кН.
Разложим силу Р на составляющие Px и Py:
Py = Psin 30° =10 0,5 =5 кН,
Px = P cos 30° =10 0,87 =8,7 кН.
За точки приведения примем точки на шарнирах балки: точку А (точка пересечения линий действий реакции опор VA и HB) и точку В (точка пересечения линий действий реакции опор VB и HB). Запишем уравнения равновесия:
∑M A = 0, VB 2 + 4 + 2 −Q 4 + 4 + 2 − Py 2 = 0 →
V = |
4 |
Q + |
1 P |
|
= |
4 |
12 + 1 |
5 |
=11,6 кН; |
|||||||||||||||||
B |
|
5 |
|
|
|
2 |
y |
|
5 |
|
|
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MB = 0, − RA |
|
+ |
|
|
+ |
|
|
|
+ Py |
|
|
+ |
|
|
|
|
+Q |
|
= 0 → |
|||||||
2 |
4 |
|
2 |
|
4 |
|
2 |
|
4 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
RA = |
4 |
|
1 |
Q |
+ |
3 |
|
|
= |
4 |
|
|
1 |
12 |
+ |
3 |
5 |
|
= 5,4 кН; |
|||||||
5 |
|
4 |
4 |
Py |
5 |
|
|
4 |
4 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
∑Fix |
= 0, Px − HB = 0 → HB = Px |
=8,7 кН. |
||||||||||||||||||||||||
Проверка:
∑Fy = RA − Py −Q +VB = 5,4 −5 −12 +11,6 = 0.
Ответ: HB = 8,7 кН, VB = 11,6 кН; VA = 5,4 кН.
Пример 4.7. Дано: m = 2 кН/м, q = 1 кН/м, F = 2 кН. Для шарнирно опертой консольной балки АВ (рис. 4.13, а) требуется вычислить опорные реакции.
96

4. Момент силы относительно центра и оси
а
б
Рис. 4.13
Решение. Мысленно выделим балку АВ, отбросим связи и заменим их действие соответствующими реакциями опор (рис. 4.13, б).
Реакция шарнирно-подвижной опоры В направлена перпендикулярно оси балки, направим ее вверх и обозначим RB. Реакция шарнир- но-неподвижной опоры А – RA будет направлена параллельно заданным силам и реакции RB, так как на балку приложена система параллельных сил.
Для вычисления реакций опор запишем уравнения равновесия. За моментные точки выбираем точки опор, т. е. точки А и В:
∑МА = 0, −m −q 6 3 + RB 10 + F 14 = 0 →
R |
= m + q 6 3 − F 14 |
= 2 +1 6 3 |
−2 14 = − |
|
8 |
= |
|
− 0,8 |
|
кН. |
|
|
|
|
|||||||||
|
|
||||||||||
B |
10 |
10 |
|
10 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||
Знак «минус» означает, что выбранное первоначально направление реакции RB вверх является ошибочным. На схеме зачеркиваем ошибочное направление и направляем в истинном (рис. 4.13, б).
∑МB = 0, −m + q 6 7 − RА 10 + F 4 = 0 →
97
И. В. Богомаз. Механика
RА = |
−m + q 6 |
7 + F 4 |
= |
−2 +1 6 7 + 2 4 |
= |
48 |
= 4,8 |
кН. |
|
10 |
|
|
10 |
|
10 |
|
|
На схеме указываем численное значение реакций опор.
Проверка:
∑Fy =−q 6 + RA + F − RB = −1 6 + 4,8 + 2 −0,8 = 0.
Ответ: RA = 4,8 кН, RB = 0,8 кН.
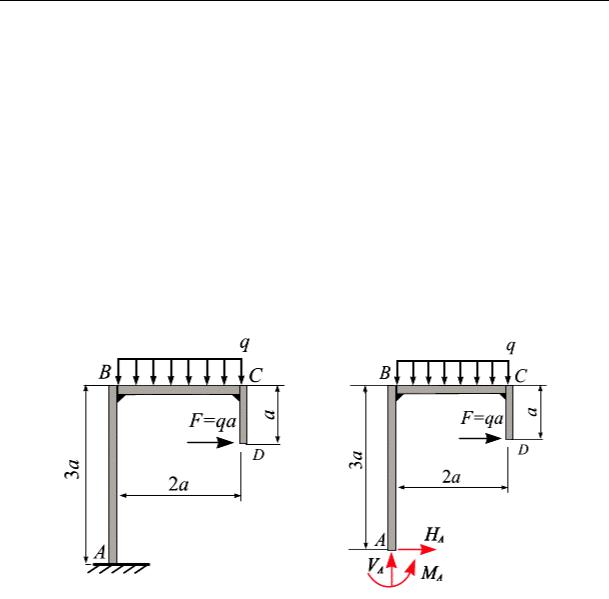
Пример 4.8. Консольная рама загружена, как показано на рис. 4.14, а. Вычислить реакции опор в жесткой заделке.
а |
б |
Рис. 4.14
Решение. Мысленно выделим раму, отбросим жесткую заделку и заменим ее действие реакциями опор – горизонтальной реакцией HA, вертикальной реакцией VA и реактивным моментом MA (рис. 4.14, б).
Запишем уравнения равновесия:
∑M A = 0, − F (3a −a) −q 2a a + M A = 0 →
M A = F 2a + 2qa2 = qa 2a + 2qa2 = 4qa2 ;
98

4. Момент силы относительно центра и оси
∑Fi y = 0, VA −q 2a = 0 →VA = q 2a = 2qa;
∑Fi y = 0, HA − F = 0 → HA = F = qa.
Проверка:
∑M D =−VA 2a + H A (3a −a) + q 2a a = −2qa 2a + qa 2a + q 2a a =
=−4qa2 + 2qa2 + 2qa2 = 0.
Ответ: MA = 4qa2, VA = 2qa, HA = qa.
Пример 4.9. Дано: P = 10 кН, q = 4 Н/м, = 8м, α = 30°. Вы-
числить реакции опор балки АВ, опертой на шарнирно-подвижную и шарнирно-неподвижную опоры, нагруженной, как показано на рис. 4.15, а.
Решение. Используя метод сечения, отбросим связи и заменим их соответствующими реакциями (рис. 4.15, б).
Распределенную нагрузку интенсивностью q заменим равнодействующей: Q = q = 4 8 = 32 кН.
а |
б |
Рис. 4.15
99
И. В. Богомаз. Механика
Разложим силу Р на составляющие Px и Py:
Py = Psin 30° =10 0,5 =5 кН,
Px = P cos 30° =10 0,87 =8,7 кН.
За моментные точки примем точку С (точка пересечения линий действий реакции опор RA и HB) и точку В (точка пересечения линий действий реакции опор VB и HB).
Запишем уравнения равновесия:
∑MC = 0, VB 2 − Py − Px ( + |
|
|
|
|
|
|
|
|
|
) +Q |
|
+ |
|
|
= 0; |
||
4 |
2 |
4 |
||||||
|
|
|
|
|
VB 2 8 −5 8 −8,7 (8 + 2) +32(4 + 2)= 161 (40 +87 −192)= −4,1 кН.
На чертеже меняем направление реакции VB (рис. 4.15, б).
∑MB = 0, − RA 2 +Q ( |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
) − Px |
+ |
|
|
+ Py |
= 0; |
||
2 |
4 |
4 |
||||||||
|
|
|
|
|
|
|
−RA 2 8 +32 (4 + 2) −8,7(8 + 2)+5 8 =
=161 (192 −87 + 40)= 161 (145)= 9,1 кН;
∑Fix = 0, −Q + Px − HB = 0 → HB =
= −Q + Px = −32 +8,7 = −23,3 кН.
На чертеже меняем направление реакции HB (рис. 4.15, б).
Проверка:
∑Fy = RA − Py −VB = 9,1−5 −4,1 = 0.
Ответ: HB = 8,7 кН, VB = 11,6 кН; RA = 5,4 кН.
100