



10. Понятие о напряжении и деформации
Получим полное напряжение p в точке K.
|
|
|
|
|
Сила |
|
|
p = lim |
R |
|
|||||
|
|
|
|
|
. |
(10.1) |
|
|
|
|
|
||||
A→0 |
A |
Площадь |
|
||||
В системе СИ напряжение выражается в паскалях Па = Н/м2 или мегапаскалях МПа = 106 Па.
Разложим вектор R по осям координат на составляющие N,
Qx, Qy. Определим нормальные и касательные напряжения:
• нормальное напряжение
σz = lim |
N |
= dN |
; |
(10.2) |
|
A |
|||||
A→0 |
dA |
|
|
• касательные напряжения
|
|
Qx |
|
|
dQx |
|
|
|
τyz = |
lim |
|
= |
|
|
, |
|
|
A |
dA |
|
||||||
|
A→0 |
|
|
|
|
(10.3) |
||
|
|
Qy |
|
|
|
|
. |
|
τyz = |
lim |
|
= |
dQy |
|
|||
A |
|
dA |
|
|
|
|||
|
A→0 |
|
|
|
|
|
||
Тогда величину напряжения p можно рассматривать как полное напряжение в точке на данной площадке (рис. 10.2).
p = σ2z + τ2xz + τ2yz . |
(10.4) |
Рис. 10.2
223


10. Понятие о напряжении и деформации
10.3. Деформации и перемещения. Деформированное состояние в точке
Изменение формы и размеров тела в результате внешнего воздействия (нагрузка, температура и другое) называется деформацией.
Положение каждой точки тела определяется ее радиус-вектором r {x, y, z} в системе координат Oxyz. При деформировании тела все
его точки смещаются.
Под влиянием приложенных сил твердое тело деформируется. Смещение во взаимном расположении частиц материала, соответствующее деформации, сопровождается изменением внутренних сил взаимодействия между частицами, при этом они являются непрерывными функциями точек тела.
Рассмотрим определенную точку. Если ее радиус-вектор до деформации был r {x1, x2 , x3}, то в деформированном теле он будет
иметь другое значение: r {x2 , y2 , z2} (рис. 10.3).
Смещение точки тела при деформировании будет определено вектором деформации (вектором смещения), который обозначим
u = r2 −r1 .
Рис. 10.3
Выразим вектор деформации через его координаты u {ux ,uy ,uz },
где ux, uy, uz – координаты вектора деформации u по осям декартовой системы координат.
225


10. Понятие о напряжении и деформации
Тогда растяжения по осям Oy и Oz будут описываться величи-
нами
εyy = |
∂u(x, y, z) |
≡ |
∂u |
, εzz = |
∂u(x, y, z) |
≡ |
∂u . |
|
∂y |
|
∂y |
|
∂z |
|
∂z |
Тогда перемещение вектора деформации u = ux i +uy j +uz k можно записать как дифференциал
числяется по формуле
dR = Rxdx + Rydy + Rzdz,
где
R = ∂R |
= |
lim |
R(x + x, y, z) − R(x, y, z) ; |
|||
|
x |
∂x |
|
|
x |
|
|
|
|
x→0 |
|
||
Ry = |
∂R |
= lim |
R(x, y + |
y, z) − R(x, y, z) ; |
||
du = |
|
∂y |
|
y→0 |
|
y |
R = ∂R |
= |
lim |
R(x, y, z + z) − R(x, y, z) . |
|||
x |
∂z |
|
|
z |
||
|
|
z→0 |
||||
∂u dx + |
∂u dy |
+ ∂u dz = εxxdx +εyydy +εzzdz . |
||||
|
∂x |
|
∂y |
∂z |
|
|
Полный дифференциал |
dR векторной функции R{x, y, z}вы- |
|||||
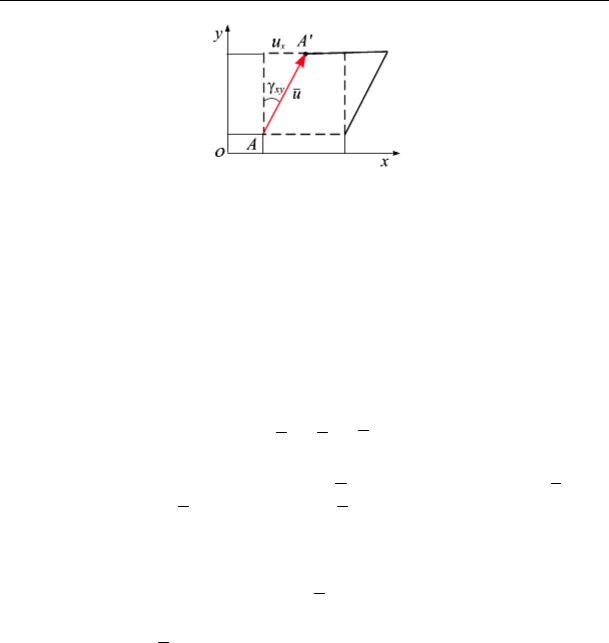
Введем понятие угловой деформации или, как принято говорить, деформации сдвига. При этой деформации точка будет перемещаться под углом к направлению оси Ox, например, в плоскости Oxy (рис. 10.5). При такой деформации перемещение в направлении оси Ox каждой частицы пропорционально ее перемещению вдоль оси Oy,
т. е. углу γyx. Тогда
tg γxy = uyx , при γxy 1 имеем γxy = uyx →ux = γxy y.
227

10. Понятие о напряжении и деформации
|
∂u |
x A |
|
|
∂uy |
|
∂u |
z |
|
|
|
∂u |
x |
A2 |
|
|
∂uy |
m2 |
|
∂u |
z n2 |
|
|||||||
+ |
|
|
+ |
|
|
m + |
|
n dz |
= |
|
|
+ |
|
|
|
|
+ |
|
|
+ |
|||||||||
|
|
∂z |
|
|
|
|
|
|
∂z |
|
|
||||||||||||||||||
|
∂z |
|
|
|
|
∂z |
|
|
|
∂z |
|
|
|
|
|
|
|
|
∂z |
|
|||||||||
|
|
∂uy |
|
|
∂u |
|
|
|
|
∂u |
|
∂u |
|
|
|
|
|
∂uy |
|
∂u |
|
|
|||||||
+ |
|
|
|
+ |
|
x Am + |
|
|
z + |
|
|
x |
An + |
|
|
|
|
+ |
|
|
z mn. |
|
|||||||
|
∂x |
|
|
|
|
|
∂x |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
∂y |
|
|
∂x |
∂z |
|
|
|
|
|
|
∂y |
|
||||||||||||
Вычислим относительную деформацию (а):
|
|
|
|
|
|
|
|
|
|
ευ = |
d |
u |
υ |
|
= |
|
∂u |
x A |
+ |
∂uy |
|
|
m |
+ |
|
∂u |
z |
|
n |
dx |
+ |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dS |
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
dS |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
∂u |
x A+ |
|
∂uy |
|
|
|
|
|
|
|
∂u |
z n |
dy |
|
|
|
∂u |
x A+ |
|
|
∂uy |
|
|
|
|
|
|
∂u |
z |
dz |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
+ |
|
|
|
|
|
|
|
|
|
m + |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m + |
|
|
|
n |
|
|
|
= |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
dS |
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
dS |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
∂u |
x A |
|
|
∂uy |
|
|
|
|
|
|
∂u |
z |
|
|
|
|
|
|
|
∂u |
x A+ |
|
∂uy |
|
|
|
|
|
|
∂u |
z |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
= |
|
|
|
|
+ |
|
|
|
|
|
|
m |
+ |
|
|
|
|
|
|
|
n A |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
m + |
|
|
n m |
+ |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂u |
x A |
|
|
|
|
|
∂uy |
|
|
|
|
|
|
∂u |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
+ |
|
|
|
|
|
|
m |
+ |
|
|
|
|
|
n n |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
= |
|
∂u |
x |
A2 |
+ |
∂uy |
|
mA+ |
|
∂u |
z |
|
|
nA+ |
∂u |
x |
|
Am + |
|
|
∂uy |
|
|
m2 + |
∂u |
z nm + |
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
||||||||||||||||||||
|
∂u |
|
|
|
∂uy |
|
|
|
|
|
∂u |
|
z n2 = |
∂u |
|
|
|
|
A2 |
|
|
|
∂uy |
|
m2 + |
∂u |
|
|
|
|
n2 |
|
∂uy |
|
∂u |
|
||||||||||||||||||||||||||||||||||||||||
+ |
|
x An + |
|
|
|
|
|
|
mn + |
|
|
|
|
|
|
|
|
|
x |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
+ |
|
|
|
|
+ |
|
|
|
x nA+ |
||||||||||||||||||||||||||||||||
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
∂x |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
∂z |
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
∂y |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂u |
z + |
|
|
∂u |
x |
|
|
|
|
|
|
|
|
∂u |
z + |
|
∂uy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
nA+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nm. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂x |
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
Введем обозначения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
εx = |
|
∂u |
x |
|
; |
|
|
|
εy = |
∂uy |
|
; |
|
εz |
= |
∂u |
z ; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
229 |

10. Понятие о напряжении и деформации
В зависимости от свойств материала и величины нагрузок деформации бывают упругие, полностью исчезающие после удаления нагрузок, и пластические или остаточные, неисчезающие, остающиеся после удаления нагрузок.
При исследовании напряженно-деформированного состояния используют различные программные продукты, например, программу MAV. Structure, предназначенную для численного анализа напряжен- но-деформированного состояния17 (рис. 10.6).
17 http://mav-structure.narod.ru/index.htm http://mav-structure.narod.ru/index.htm
231