

И. В. Богомаз. Механика
Рис. 7.8
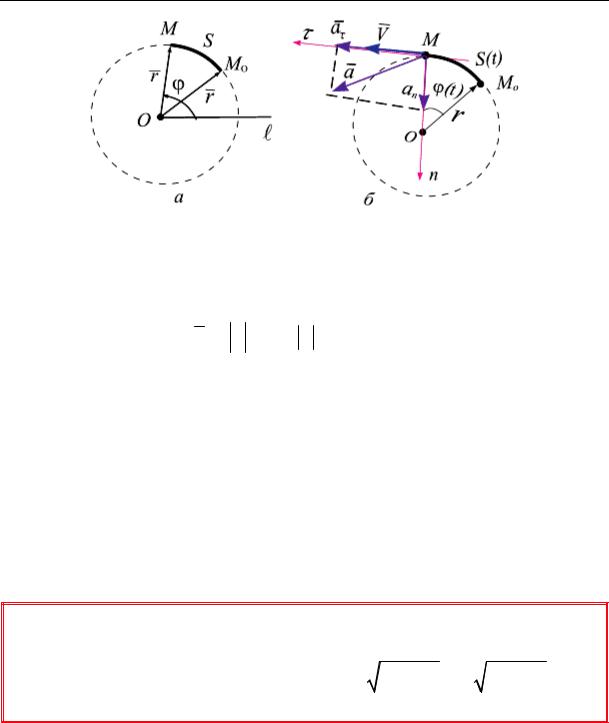
Вычислим скорость и ускорение точки:
Vτ = S τ = ro ϕ τ = roωo τ;
(7.4)
|
|
|
|
|
|
|
|
|
|
|
|
V 2 |
|
||
a |
τ |
= |
S |
τ = r |
ϕ |
τ = r ε |
o |
τ; |
a |
n |
= |
|
τ |
n = ω2r |
n. |
|
|
||||||||||||||
|
|
|
0 |
|
o |
|
|
|
|
|
o o |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ro |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Знак производной ϕ определяет направление движения точки:
•при ϕ > 0, точка движется против часовой стрелки;
•при ϕ< 0, точка движется по часовой стрелке;
•ϕ > 0, ϕ > 0, или ϕ< 0, ϕ< 0– точка движется ускоренно;
•ϕ > 0, ϕ< 0 или ϕ< 0, ϕ > 0 – точка движется замедленно.
Круговое движение точки
V = ω R, |
a = ε |
R, |
a = ω2 R, |
a = a2 |
+a2 |
= R ε2 |
+ω4 . |
|
o |
τ |
o |
|
n o |
τ |
n |
o |
o |
7.3. Простейшие движения твердого тела
Рассмотрим абсолютное твердое тело П в плоскости (рис. 7.9, а). Положение тела П в плоскости определим тремя независимыми параметрами. Выберем на теле точку А (полюс) и зафиксируем ее координаты – xA, yA. Через полюс проведем произвольную прямую AB и за-
144

7. Кинематика точки
фиксируем угол между осью Ox прямой AB – угол φ. Если тело П неподвижно, параметры xA, yA и φ остаются неизменными с течением времени. Если тело П движется, то параметры xA, yA и φ меняются со временем, т. е. являются функциями времени: xA(t), yA(t), φ(t). Поскольку эти параметры независимы, движение тела П в плоскости можно разложить на три независимых движения: движение тела вдоль оси Ox – xA(t) (рис. 7.9, б), движение тела вдоль оси Oy – yA(t) (рис. 7.9, в), вращение твердого тела вокруг полюса А – φ(t) (рис. 7.9, г). Эти движения принято называть простейшими.
Рис. 7. 9
Запишем уравнения движения простейших движений твердого
тела.
1. Уравнения поступательного движения твердого тела
имеют вид:
x = xA(t), y = yA(t).
При поступательном движении твердого тела траектории, скорости и ускорения всех точек тела одинаковы (рис. 7.9, б, в).
В этом случае тело принимается за материальную точку и исследуется движение тела, как движение материальной точки.
2. Уравнение вращения твердого тела в плоскости вокруг не-
подвижной точки А имеет вид (рис. 7.9, г):
φ = φ(t).
Вращение твердого тела вокруг неподвижной точки А в плоскости определяется углом поворота тела (рис. 7.10):
φ = φ(t).
145

И. В. Богомаз. Механика
Рис. 7.10
Тогда ϕ = ω – угловая скорость тела, ϕ = ε – угловое ускоре-
ние тела.
При вращении твердого тела все его точки движутся по окружности в направлении угловой скорости.
Скорость и ускорение любой точки тела, например точки М, вычисляются по формулам:
V = ω r ; a |
τ |
= r ε; |
a |
n |
= r ω2 |
, a = a2 |
+a2 |
= r ε2 |
+ω4 . |
|
M |
M |
M |
|
M |
τ |
n |
M |
|
||
Здесь rM – расстояние точки М до центра вращения А.
Пример преобразования поступательного движения тела во вращательное движение другого твердого тела осуществляется при помощи диска, на обод которого намотана нерастяжимая нить (нерастяжимый трос, канат и т. д.), за конец которой прикреплен груз (рис. 7.11).
Запишем уравнения связи. Для этого свяжем перемещение точек соприкосновения нити и обода диска, радиус которого равен r.
Пусть тело опустилось на S(t), тогда все точки нерастяжимой нити прошли путь тоже S(t), в результате чего диск повернулся на
угол φ(t) против часовой стрелки. |
|
|
|
|
|
|
|
|
|
|
||||||||||
Имеем |
|
|
|
|
|
|
S(t) = φ(t) · r. |
|
|
|
|
|
||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 S →ω= |
|
|
|
|
1 |
|
|
|
|
1V →ε = |
|
|
|
|
1 |
|
|
|
= a . |
|
ϕ = |
|
ϕ |
|
= |
|
S( t ) |
|
= |
|
ϕ |
|
= |
|
S( t ) |
|
|||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|||||||||||||||||
146 |
r |
|
|
|
|
r |
|
|
|
|
r |
|
|
|
|
r |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

7. Кинематика точки
Рис. 7.11
а |
б |
в |
г |
Рис. 7.12
Преобразование вращения одного твердого тела вокруг неподвижной оси во вращение второго твердого тела вокруг другой неподвижной оси осуществляется посредством зубчатого или фрикционного (за счет сил трения) зацепления двух дисков (рис. 7.12, а, б) или при помощи ременной передачи (рис. 7.12, в, г).
При внешнем зацеплении (рис. 7.12, а) и прямой ременной передаче (рис. 7.12, в) направления вращений обоих дисков совпадают; при внутреннем зацеплении (рис. 7.12, б) и скрещивающейся ременной передаче (рис. 7.12, г) направление вращения дисков противоположно.
147

И. В. Богомаз. Механика
Примем за ведущее звено диск 1, за ведомое – диск 2. Пусть диск 1 за время t повернулся по часовой стрелке на угол φ1, тогда диск 2 повернется против часовой стрелки на угол φ1. Тогда путь S, пройденный точками на ободе дисков, находящихся в зацеплении или связанных ременной передачей, одинаков. На этом основании запишем уравнение связи. Напомним, что длина дуги, угол поворота и радиус связаны соотношением S = φR.
Тогда для всех типов зацепления имеем
φ1r1 = φ2r2. |
(а) |
Дифференцируя по времени правые и левые части (а), получим
ω1r1 = ω2r2. |
(б) |
Здесь ω1, ω2 – угловые скорости дисков; r1, r2 – радиусы дисков. Угловые скорости дисков обратно пропорциональны числам
зубцов zi, или радиусам ri, или диаметрам di дисков.
ω1 |
= |
r2 |
= |
z2 |
= |
d2 |
, |
|
ω |
r |
z |
d |
|||||
|
|
|
|
|||||
2 |
1 |
1 |
1 |
|
||||
где d1, d2 – диаметры дисков; z1, z2 – число зубцов каждого диска. Дифференцируя по времени правые и левые части (в), получим
ε1r1 = ε2r2.
Здесь ε1, ε2 – угловые ускорения дисков.
Часто применяется соединение дисков, когда два диска вращаются вокруг одной неподвижной оси. Если при этом они жестко соединены друг с другом, то их угловые скорости и угловые ускорения равны (на рис. 7. 2, в – второй диск).
148