


12. Плоские стержневые фермы
Этому условию удовлетворяют, например, следующие две системы опорных закреплений:
1)комбинация шарнирно-подвижной и шарнирно-неподвижной опор для стержневых конструкций, опирающихся в двух точках;
2)комбинация трех шарнирно-подвижных опор, при этом направления реакций всех трех опор не должны пересекаться в одной точке и не должны быть параллельны друг другу.
Наличие у геометрически неизменяемой стержневой конструкции системы четырех и более опорных связей указывает на то, что сооружение статически неопределимо. Статически неопределимую стержневую конструкцию нельзя рассчитывать с помощью одних лишь уравнений статики.
12.2. Методы расчета плоских ферм
Рассмотрим принципы вычисления внутренних усилий в стержнях плоской фермы (рис. 12.8, а). Если в узлах фермы приложены сосредоточенные силы, в стержнях фермы возникают внутренние продольные усилия.
Для их вычисления используется метод сечения: рассечем стержень на две части произвольным сечением z (рис 12.8, б), отбросим вторую часть стержня. В поперечных сечениях рассеченного стержня возникнут внутренние усилия N , N ′, равные по модулю и противопо-
ложные по знаку.
Рис. 12.8
261


12. Плоские стержневые фермы
∑M K =RА AK − P2 KM + N5 h1 = 0 → N5 = |
1 |
(P2 KM −VA AK ), |
|
||
|
h1 |
|
где h1 – плечо внутреннего усилия N5 относительно моментной точки K. Для вычисления внутренних усилий N4 и N6 составим сумму моментов относительно моментных точек точек L и М соответственно:
∑M L = −VA h2 + P2 h3 + N6 h = 0 → N6 |
= |
1 |
(VA h2 − P2 h3 ), |
|
|
h |
|
где h – высота фермы; h2 – плечо силы VА; h3 – плечо силы Р2;
∑MM = −VA AM − N4 h4 = 0, откуда N4 = − |
1 |
AM VA . |
|
||
|
h4 |
|
а |
б |
Рис. 12.9
Упрощение, основанное на специальном выборе моментной точки, может быть достигнуто не только тогда, когда в разрезе встречается три стержня, но и в некоторых более сложных случаях.
Например, усилия в стержнях фермы (рис. 12.9, а) вычислим в следующем порядке: рассечем ферму сечением 1–1; определим моментные точки, составим уравнения моментов относительно этих точек, вычисляем усилия в стержнях N1, N3, N4. Далее проводится сечение 2–2,
263

12. Плоские стержневые фермы
Сечение II–II рассечет следующие стержни и т. д. Таким образом можно вычислить усилия в нижнем и верхнем поясе фермы.
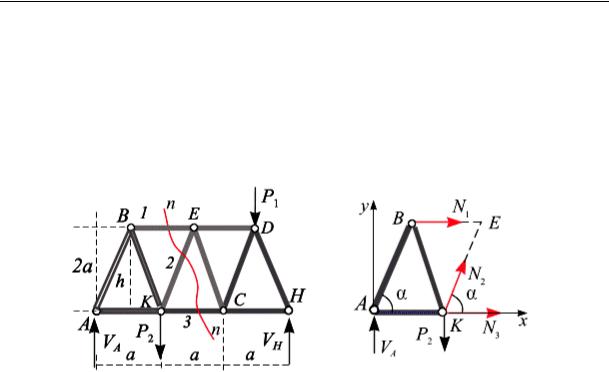
Пример 12.1. Задана плоская ферма (12.11, а). Значение внешних сил задано, реакции опор предварительно вычислены. Вычислить усилия, возникающие в стержнях фермы № 1, № 2, № 3.
а |
б |
Рис. 12.11
Решение. Для вычисления усилий в стержнях фермы 1, 2, 3 применим метод сплошных сечений. Рассечем ферму сплошным сечением n–n (рис. 12.11, а), отбросим правую часть рассеченной фермы. Рассеченные стержни заменим соответственно усилиями: № 1→ N1, № 2→ N2, № 3→ N3 и рассмотрим равновесие левой части фермы от сечения (рис. 12.11, б). Попарно пересечем линий действия усилиий N2, N3 и N1, N2, тем самым определим положение моментных точек.
Моментной точкой для усилия N1 является точка K (рис. 12.11, б). Запишем уравнение моментов относительно моментной точки K:
∑M K = −VA a − N1 a1 = 0,
откуда
N1 = −VA .
Моментная точка для усилия N3 – точка Е. Запишем уравнение моментов относительно моментной точки Е (рис. 12.11, б):
|
a |
+ P |
a |
+ N |
a = 0 |
, |
|
∑ME = −VA a + |
2 |
|
2 |
||||
|
|
2 |
|
3 |
|
||
265


12. Плоские стержневые фермы
Способ проекций (способ вырезания узлов). Рассмотрим пло-
скую ферму, показанную на рис. 12.13, а. Вычислим усилия в стержнях фермы и построим эпюры внутренних продольных усилий, если
P1 = 20 кН, P = 10 кН.
Обозначим узлы заданной фермы буквами и пронумеруем стержни Выделим сечением ферму, отбросим связи, заменим их действие реакциями RA и RH, вычислим реакции опор. За моментные точки выберем шарниры A и H:
∑M A = 0, RH 3a − P2 2a − P1 1,5a − P2 a = 0 → RH = 20 кН;
∑M H = 0, − RA 3a + P2 2a + P1 1,5a + P2 a = 0 → RA = 20 кН.
Проверка:
∑Fy = RA − P2 − P1 − P2 + RH = 20 −10 −20 −10 + 20 = 0.
Искомые внутренние усилия обозначим символом Ni. Будем мысленно последовательно вырезать все узлы заданной фермы, рассеченные стержни заменять соответственно усилиями: № 1→ N1, № 2→ N2 и т. д. и вычислять соответствующие усилия способом проекций.
а |
б |
Рис. 12.13
267


12. Плоские стержневые фермы
−N1 − N4 cos 60D + N3 sin 75D = 0;
−(−21, 28) −0,5 N4 + 0,966 N3 = 0 ;
∑Fi y = 0, N4 sin 60D + N3 cos 75D = 0 ;
0,866 S4 + 0, 259 S3 = 0 ;
N4 = 5,7 кН, N3 = −3,344 N4 = −19,06 кН.
Построим из сил N1, N3, N4, силовой многоугольник и убедимся, что он замкнутый (рис. 12.15, б).
а б
Рис. 12.15
Узел С (рис. 12.16, а):
∑Fi y |
= 0, N4 sin 50D + N5sin 78D − Р2 = 0 , |
|||||
|
Р − N |
sin 50o |
|
10-5,7 0,766 |
|
|
N5 = |
2 |
4 |
|
= |
|
=5,78кH; |
|
sin 78D |
0,978 |
||||
|
|
|
|
|||
∑Fi x = 0, − N2 − N4 cos 50D + N5 cos 78D + N6 = 0;
N6 = N2 + N4cos 50D − N5cos 78D =
= 7, 28 +5,7 0,643 −5,76 0, 208 = 9,75 кH.
269

12. Плоские стержневые фермы
где Nрасч = Nmax – значение продольной силы, вычисленное от расчётных нагрузок.
Условие прочности для опасного сечения при сжатии
|
|
|
N max |
|
|
21,3 103 |
|
= 0,197 10−3 |
м2 =1,97 см2 . |
||||
A |
= |
|
|
сжат |
|
= |
|
|
|
||||
γ |
|
0,9 120 106 |
|||||||||||
с |
|
|
с |
R |
|
|
|
|
|
||||
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
Площадь |
|
квадрата |
A |
= a 2 |
, откуда |
сторона квадрата |
|||||||
|
|
|
|
|
|
|
|
|
с |
|
с |
|
|
ac = 1,97 =1, 4 см.
Условие прочности для опасного сечения при растяжении
A = |
|
Nрастmax |
|
= |
9,8 103 |
= 0,136 10−3 |
м2 |
=1,36 см2 . |
||
|
γ |
|
R |
|
0,9 80 106 |
|||||
t |
|
с |
|
|
|
|
|
|||
|
|
|
c |
|
|
|
|
|
|
|
Площадь квадрата At = at 2 , тогда сторона квадрата
at = 1,36 =1,17 см.
а |
б |
Рис. 12.17
271
