

- •ВВЕДЕНИЕ
- •1.1. Общие сведения по электрическим машинам
- •1.2. Классификация электрических машин
- •1.4. Принцип действия трансформатора
- •1.9. Принцип действия и устройство машины постоянного тока
- •2. ТРАНСФОРМАТОРЫ
- •2.1. Основные соотношения в трансформаторе
- •2.2. Виды трансформаторов и магнитопроводов
- •2.3. Типы и конструкция обмоток
- •2.4. Схемы и группы соединения трансформаторов
- •2.5. Расчет магнитной цепи, намагничивающий ток и ток холостого хода
- •2.6. Форма кривых намагничивающего тока и магнитного потока трансформатора
- •2.7. Уравнения напряжения и векторные диаграммы трансформатора
- •2.8. Схема замещения трансформатора
- •2.9. Опытное определение параметров схемы замещения
- •2.10. Энергетические диаграммы активной и реактивной мощностей трансформатора
- •2.11. Коэффициент полезного действия трансформатора. Зависимость КПД от нагрузки
- •2.12. Изменение вторичного напряжения при нагрузке. Внешняя характеристика трансформатора
- •2.13. Регулирование напряжения трансформатора
- •2.14. Параллельная работа трансформаторов
- •2.16. Включение ненагруженного трансформатора в сеть
- •2.17. Внезапное короткое замыкание
- •2.17. Перенапряжения в трансформаторах
- •3. РАЗНОВИДНОСТИ ТРАНСФОРМАТОРОВ
- •3.1. Автотрансформаторы
- •3.2. Трехобмоточный трансформатор
- •3.3. Измерительные трансформаторы тока и напряжения
- •3.4. Сварочные трансформаторы
- •3.5. Трансформаторы преобразовательных установок
- •4. ОБМОТКИ МАШИН ПЕРЕМЕННОГО ТОКА
- •4.2. Магнитодвижущие силы многофазных обмоток
- •4.3. Электродвижущие силы, индуцируемые в обмотках машин переменного тока
- •4.4. Схемы обмоток машин переменного тока
- •5. АСИНХРОННЫЕ МАШИНЫ
- •5.1. Асинхронная машина при неподвижном роторе
- •5.2. Фазорегуляторы и индукционные регуляторы напряжения
- •5.3. Работа асинхронной машины при вращающемся роторе
- •5.4. Схема замещения асинхронной машины
- •5.5. Расчет характеристик двигателей по схемам замещения
- •5.6. Механические характеристики
- •5.7. Влияние на механическую характеристику высших гармоник магнитного поля
- •5.8. Устойчивость работы асинхронного двигателя
- •5.9. Рабочие характеристики асинхронного двигателя
- •5.10. КПД и коэффициент мощности асинхронного двигателя
- •5.11. Пуск в ход трехфазных асинхронных двигателей
- •5.12. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом
- •5.14. Многоскоростные двигатели
- •5.15. Торможение двигателей
- •6. АСИНХРОННЫЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
- •6.1. Асинхронный автономный генератор
- •6.2. Однофазные асинхронные двигатели
- •6.3. Двухфазные управляемые асинхронные двигатели автоматических устройств
- •6.4. Асинхронный тахогенератор
- •6.5. Сельсины
- •6.6. Вращающиеся трансформаторы
- •7. СИНХРОННЫЕ МАШИНЫ
- •7.2. Характеристика холостого хода
- •7.3. Работа синхронного генератора при симметричной нагрузке
- •7.4. Математическая модель электромагнитных процессов в синхронном генераторе
- •7.5. Векторные диаграммы синхронных генераторов
- •7.6. Характеристики синхронных генераторов
- •7.7. Потери мощности и КПД синхронного генератора
- •7.8. Параллельная работа синхронных машин
- •7.9. Мощность и электромагнитный момент
- •7.10. Статическая устойчивость
- •7.12. Качания синхронных машин
- •7.13. Синхронные двигатели
- •7.14. Внезапное короткое замыкание синхронной машины
- •7.15. Несимметричные режимы работы синхронных генераторов
- •8. СИНХРОННЫЕ МАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
- •8.1. Назначение и особенности рабочего режима
- •8.4. Синхронные гистерезисные двигатели
- •9. МАШИНЫ ПОСТОЯННОГО ТОКА
- •9.1. Магнитная цепь машины и метод ее расчета
- •9.2. Основные электромагнитные соотношения в машине постоянного тока
- •9.3. Магнитное поле машины постоянного тока
- •9.4. Напряжение между коллекторными пластинами и компенсационная обмотка
- •9.5. Коммутация
- •9.6. Потери мощности. Коэффициент полезного действия электрической машины
- •9.7. Генераторный режим работы машины
- •9.8. Параллельная работа генераторов постоянного тока
- •9.9. Двигательный режим работы машины
- •9.10. Пуск и реверсирование двигателей постоянного тока
- •9.11. Устойчивость работы двигателей
- •9.12. Двигатели параллельного возбуждения
- •9.13. Двигатели последовательного возбуждения
- •10. СПЕЦИАЛЬНЫЕ МАШИНЫ ПОСТОЯННОГО ТОКА
- •10.1. Исполнительные двигатели постоянного тока
- •10.2. Тахогенераторы
- •10.3. Бесконтактные двигатели постоянного тока
- •ЗАКЛЮЧЕНИЕ
- •БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- •ОГЛАВЛЕНИЕ

6. Асинхронные машины cпециального назначения
Величина ЭДС выходной обмотки приемника зависит от продольной составляющей МДС Fdп, которая изменяется в зависимости от угла рассогласования:
F |
= |
3 F |
sin θ, |
(6.19) |
dп |
|
2 фm |
|
|
где Fфm – максимальное значение МДС фазы; θ = θд – θп – угол рассогласования сельсинов.
Магнитный поток приемника Фdп, созданный МДС (Fdп), индуцирует в выходной обмотке ЭДС: Евых = 4,44wвпkwФdп.
Так как Евых ~ Фdп, а Фdп Fdп, выходная ЭДС ( Евых ) изменяется по такому же закону, что и Fdп, см. формулу (6.19):
Евых = Евых mах sin θ. |
(6.20) |
Таким образом, выходная ЭДС приемника зависит от синуса угла рассогласования θ, в согласованном состоянии сельсинов равна нулю и достигает максимума при θ = 90°.
При выводе ротора сельсина-датчика из согласованного положения (при его повороте на некоторый угол) на выходной обмотке приемника появляется напряжение Uвых. Это напряжение подается на вход усилителя
ипосле усиления попадает на обмотку управления исполнительного двигателя ИАД. Ротор двигателя вращается, поворачивая ротор сельсинаприемника, с которым он механически связан. Вместе с ротором приемни-
ка поворачивается в пространстве и его магнитный поток Фdп; изменяется потокосцепление с выходной обмоткой и ее ЭДС. Роторы двигателя и приемника поворачиваются до тех пор, пока ротор сельсина-приемника не по-
вернется на заданный датчиком угол θд = θп и сельсины не займут согласованного положения, в котором Фdп перпендикулярен оси выходной обмотки и выходное напряжение сельсина-приемника Uвых равно нулю.
При необходимости автоматически складывать или вычитать угловые величины, задавать в качестве углов логарифмы других величин, производить умножение или деление применяют дифференциальный сельсин, получающий сигнал от двух датчиков (или служащий вторым датчиком)
иработающий в индикаторном режиме [21].
6.6. Вращающиеся трансформаторы
Вращающимися трансформаторами называют электрические микромашины переменного тока, преобразующие угол поворота ротора θ в напряжение, пропорциональное синусу или косинусу этого угла или пропор-
271

6. Асинхронные машины cпециального назначения
циональное самому углу поворота. Эти машины широко применяются в автоматических и вычислительных устройствах, предназначенных для решения геометрических и тригонометрических задач, выполнения различных математических операций, построения треугольников, преобразования координат, разложения векторов и т. д. В системах автоматического регулирования их используют в качестве измерителей рассогласования, фиксирующих отклонение от некоторого заданного положения.
Вращающие трансформаторы (ВТ) выполняют так же, как асинхронные двигатели с фазным ротором. На статоре и роторе размещают по две одинаковые распределенные обмотки, сдвинутые на 90°. Магнитопровод выполняют из листов электротехнической стали или пермаллоя, тщательно изолированных друг от друга.
Работает трансформатор в режиме поворота ротора или его вращения. Одну обмотку статора – обмотку возбуждения В − подключают к сети переменного тока, а другую – компенсационную обмотку К – к некоторому сопротивлению или замыкают накоротко. Иногда обе статорные обмотки получают независимое питание переменного тока.
Обмотки ротора S (синусная) и С (косинусная) присоединяют к контактным кольцам. Для уменьшения числа контактных колец концы двух обмоток ротора присоединяют к общему кольцу (рис. 6.17, а).
В зависимости от схемы включения обмоток возможны различные режимы работы ВТ.
|
|
|
|
d |
|
|
|
|
|
I |
|
|
|
|
|
|
В |
в |
|
|
Фsd |
||
|
|
|
|
|
Фs |
||
|
К |
|
|
|
|
α |
|
|
α |
|
|
|
Фsq |
||
|
|
Is |
|
|
|||
|
|
|
|
|
Фd |
|
|
С |
S |
С |
S |
q |
|
|
|
|
|
|
|
|
Фв |
|
|
|
|
|
|
Zнs |
|
|
|
|
а |
|
|
б |
|
в |
|
Рис. 6.17. Схемы соединения вращающихся трансформаторов и векторная диаграмма синусного трансформатора
272

6.Асинхронные машины cпециального назначения
Всинусно-косинусных трансформаторах (СКВТ) выходное напряжение одной обмотки пропорционально синусу угла поворота, а другой – косинусу угла поворота ротора.
Если ось обмотки С ротора сдвинута относительно оси обмотки статора на некоторый угол α (рис. 6.17, б), то максимальное значение потока, сцепленного с этой обмоткой,
Φcm = Φdm cos α, |
(6.21) |
а ЭДС, индуцированная в этой обмотке, |
|
Ес = 4,44 f1w2Фdm cosα. |
(6.22) |
Выразив ЭДС ротора, наведенную в ней потоком Фd, через ЭДС статорной обмотки, и отношение эффективных витков (w2 и w1) обмоток, получим
Е |
= w2 |
E cos α = k |
E cos α = k(α)E , |
(6.23) |
|
с |
w1 |
в |
т в |
в |
|
где k (α) = kmcos α = (w2/w1)cos α − коэффициент трансформации вращающегося трансформатора, значение которого в отличие от обычного является функцией угла поворота α.
Обмотка S ротора сдвинута относительно обмотки С на угол 90°, следовательно выходная ЭДС в этой обмотке
Е |
|
= 4,44w f Ф |
|
cos |
α − |
π |
|
= k |
E cos |
α − |
π |
|
= k |
E sin α. (6.24) |
|
|
s |
1 1 |
dm |
|
|
2 |
|
|
т в |
|
|
2 |
|
|
т в |
При холостом ходе выходные напряжения на синусной и косинусной обмотках ротора равны соответствующей ЭДС:
Us = Es = kтEв sin α , |
(6.25) |
Uc = Ec = kтEв cos α, |
(6.26) |
т. е. изменяются по требуемым законам.
При подключении нагрузки с высоким входным сопротивлением (например, электронноеустройство) режимработыпрактически неизменится.
При любой другой нагрузке по обмоткам, например синусной (синусный ВТ), потечет ток, величина которого определится ЭДС синусной обмотки и сопротивлениями обмотки zs и нагрузки zнs:
Is = Es (zs + zнs ) . |
(6.27) |
273

6. Асинхронные машины cпециального назначения
Созданная этим током МДС совпадает с осью фазы S (рис. 6.17, в), которую представим в виде двух составляющих: продольной Fsd = Fs sin α и поперечной Fsd = Fs cos α. Продольная составляющая, как в обычном трансформаторе, создает в обмотке возбуждения компенсирующий ток, МДС которого компенсирует действие Fsd, не искажая выходное напряжение. Поперечная составляющая Fsd создает во вращающемся трансформаторе поперечный поток Фq, относительно которого обмотка S является косинусной, и, следовательно, в ней индуцируется косинусная составляющая ЭДС, пропорциональная току нагрузки. При включении нагрузки в цепь косинусной обмотки появляется синусная составляющая ЭДС. Итак, при нагрузке нарушается требуемый закон изменения ЭДС и выходного напряжения от функции угла поворота ротора и возникает погрешность. Для ее устранения применяют симметрирование трансформатора. При вторичном симметрировании (со стороны ротора) на выходе обеих обмоток ротора включают одинаковые нагрузочные сопротивления, создавая компенсирующие друг друга поперечные составляющие МДС. При первичном симметрировании (со стороны статора) замыкают накоротко или на добавочное сопротивление компенсационную обмотку, создающую поперечную МДС и компенсирующую погрешность.
Достижение у вращающегося трансформатора линейной выходной характеристики сводится к получению зависимости выходного напряжения от угла поворота ротора в виде функции
|
f (α) = sin α (1 + C cos α), |
(6.28) |
|
|
|
где С − коэффициент, не зависящий от α. |
|
|
|
Наименьшее отклонение (в преде- |
|
|
|
лах 0,1 %) этой функции от линейной за- |
|
|
В |
висимости в диапазоне углов от −55 до |
|
|
|
+55° достигается при C = 0,536. |
|
|
К |
В схеме, приведенной на рис. 6.18 |
|
|
(первичное симметрирование), последо- |
||
|
|
||
|
Iнs |
вательно и согласованно соединены об- |
|
С |
мотки возбуждения В и косинусная С, их |
||
S |
концы подключают к сети. К синусной |
||
|
Zнs |
||
|
обмотке подсоединяют нагрузочное со- |
||
|
|
противление Zнs. Компенсационную об- |
|
|
|
мотку К замыкают накоротко для ком- |
|
|
|
пенсации поперечного потока Фq. Про- |
|
Рис. 6.18. Линейный |
дольный (основной) магнитный поток Фd |
||
вращающийся трансформатор |
создается током Iв, проходящим по вит- |
||
274
6. Асинхронные машины cпециального назначения
кам wв обмотки В и продольным виткам wс cos α обмотки С, т. е. обмотка возбуждения имеет wв + wс cos α витков. Тогда ЭДС Es, индуцируемая потоком Фd в продольных витках выходной обмотки S, определится выражением
Es = Epeз |
ws sin α |
, |
(6.29) |
w + w cos α |
|||
|
в c |
|
|
гдеЕрез = Ев + Ес − ЭДСрезультирующейобмоткивозбуждения(Ерез U1).
Введя коэффициент трансформации kт = wc = ws , получим wв wв
Es = kтEpeз |
|
|
sin α |
. |
(6.30) |
|
1 |
+ kт cos α |
|||||
|
|
|
||||
Уравнение (6.30) аналогично выражению (6.28). Для определения гипотенузы треугольника по двум заданным катетам, преобразования системы координат (например, декартовой в полярную) используют транс- форматор-построитель, выходное напряжение которого связано с подаваемыми напряжениями зависимостью
Uвых = C U12 +U22 . |
(6.31) |
||
|
|
|
|
С |
|
Uв |
|
|
|
|
|
|
|
|
Uк |
|
|
|
В |
В |
ИАД |
|
К |
|
|
||
|
|
С |
S |
|
У |
S |
С |
|
|
|
U |
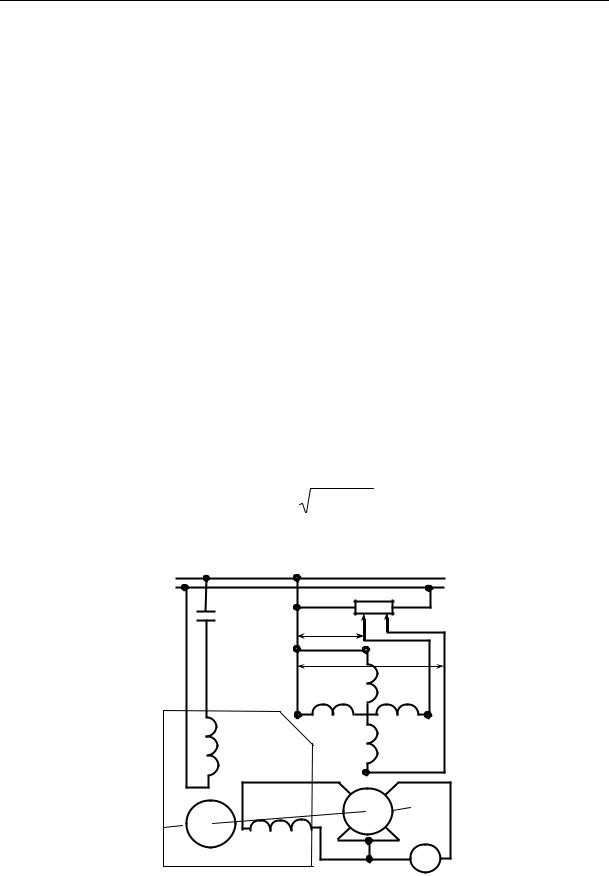
Рис. 6.19. Вращающийся трансформатор-построитель |
|||
275

6.Асинхронные машины cпециального назначения
Втаком трансформаторе обмотки статора В и К присоединяют к од-
нофазной сети и подают напряжение различного значения Uв и Uк (рис. 6.19). Одну из обмоток ротора, например C, присоединяют к управляющей обмотке исполнительного двигателя, а другую – выходную S – к измерительному прибору U.
Обмотки статора В и К создают в трансформаторе результирующий магнитный поток, продольная и поперечная составляющие которого
Фdm =Uв |
(4,44 f1 w1 ) , |
(6.32) |
Фqm =Uк |
(4,44 f1 w1) . |
(6.33) |
Если магнитная цепь машины не насыщена, то результирующий |
||
поток |
(Uв2 +Uк2 ) (4,44 f1w1 )2 . |
|
Фpeз = Ф2тd +Ф2тq = |
(6.34) |
|
В обмотках С и S результирующий поток индуцирует ЭДС: |
|
|
Ес = 4,44 f1w2Фрезт cos γ, |
(6.35) |
|
Es = 4,44 f1w2Фрезт sin γ, |
(6.36) |
|
где γ − угол между осью обмотки С и осью результирующего потока.
Напряжение Uc = Ec подается на управляющую обмотку асинхронного исполнительного двигателя ИАД, который вращает ротор до тех пор, пока угол γ = 90º, а ЭДС Ec = 0. При этом ротор остановится, а напряжение
U |
вых |
= E |
s m |
= 4,44 f w Ф |
резт |
= K |
т |
U 2 |
+U 2 . |
(6.37) |
|
|
1 2 |
|
в |
к |
|
Это выражение зафиксирует прибор; оно пропорционально гипотенузе прямоугольного треугольника, катеты которого пропорциональны Uв и Uк. Если требуется перейти от декартовой системы координат к полярной, то напряжение Uвых можно рассматривать как модуль вектора, задан-
ного в декартовой системе координат проекциями Uв и Uк. Аргумент вектора определится углом поворота ротора относительно статора.
От вращающихся трансформаторов требуется высокая точность воспроизведения тех или иных функциональных зависимостей. Точность их в основном определяется тщательностью конструктивной проработки, качеством изготовления материалов, принципом действия, условиями экс-
276

6. Асинхронные машины cпециального назначения
плуатации. У вращающихся трансформаторов величина максимальной погрешности составляет доли процента воспроизведения требуемой зависимости [27].
Вопросы и задания для самоконтроля
1.Поясните способы пуска однофазных асинхронных двигателей.
2.Почему асинхронный двигатель с однофазной обмоткой на статоре не имеет пускового момента?
3.Объясните действие сельсинов. Какие режимы сельсинов Вам известны? Как осуществляются эти режимы?
4.Расскажите, как работает асинхронный генератор?
5.Объясните устройство асинхронного исполнительного двигателя
сполым ротором. Чем достигается отсутствие самохода у таких двигателей?
6.Объясните принцип действия асинхронного тахогенератора. В чем его преимущество перед тахогенератором постоянного тока?
7.Какие схемы включения (режимы работы) вращающихся трансформаторов Вам известны? Расскажите об особенностях этих режимов.
277