

4.3.3. Распределенные силы. Центр тяжести
До сих пор сила как мера взаимодействия материальных тел рассматривалась в виде вектора, приложенного к определенной точке тела. Однако в природе существует широкий класс взаимодействий материальных тел, которые нельзя заранее представить в виде сосредоточенного вектора, т. е. силы, приложенной к какой-то конкретной точке тела. Такими силовыми факторами являются, например, силы давления жидкостей и газов на твердые тела, силы тяготения, электромагнитные силы и т. д. Поэтому в механике вводятся в рассмотрение распределенные силы, которые делятся на поверхностные и объемные. Поверхностные действуют на каждый элемент поверхности рассматриваемого тела. Объемные действуют на каждый элемент объема рассматриваемого тела. К поверхностным силам относятся силы давления, а к объемным — силы тяготения и электромагнитные силы.
В теоретической механике все аксиомы и теоремы кинетики справедливы только при действии на механическую систему сосредоточенных сил. Поэтому при использовании этих теорем каждую распределенную нагрузку нужно заменить ее равнодействующей, то есть сосредоточенной силой. Такая замена правомерна, потому что в теоретической механике рассматриваются только абсолютно твердые тела.
Р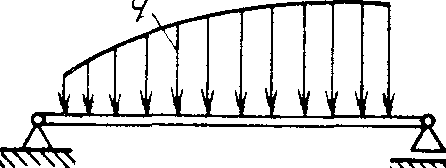 аспределенная
нагрузка характеризуется ее
интенсивностью, т. е. величиной силы,
приходящейся: на единицу объема тела
(в случае объемных сил), на единицу
площади (в случае поверхностных сил),
на единицу длины (в случае, когда можно
пренебречь поперечными размерами тела).
В последнем случае распределенная
нагрузка называется плоской и на схеме
изображается в виде
аспределенная
нагрузка характеризуется ее
интенсивностью, т. е. величиной силы,
приходящейся: на единицу объема тела
(в случае объемных сил), на единицу
площади (в случае поверхностных сил),
на единицу длины (в случае, когда можно
пренебречь поперечными размерами тела).
В последнем случае распределенная
нагрузка называется плоской и на схеме
изображается в виде
Рис. 4.22 графика интенсивности q, называемого эпюрой распределенной нагрузки (рис. 4.22). Направление взаимодействия между телами указывается стрелками, а кривая, ограничивающая эпюру, дает закон изменения интенсивности. На практике чаще всего встречаются параллельные распределенные силы одного направления. Рассмотрим наиболее важные с точки зрения практических приложений примеры распределенных сил этого вида: силы тяжести и плоскую распределенную нагрузку.
Центр тяжести твердого тела. На каждую частицу твердого тела, которое находится вблизи земной поверхности и размерами которого по сравнению с радиусом Земли можно пренебречь, действуют вертикальные силы тяжести (рис. 4.21). Как было выяснено выше (см. формулы 4.35 и 4.36), система этих параллельных сил имеет равнодействующую, модуль которой равен весу тела
![]() .
(4.37)
.
(4.37)
Эта равнодействующая направлена параллельно силам тяжести частиц тела, а координаты точки ее приложения С — центра тяжести тела — определятся по формулам
 ,
,
 ,
,
 ,
(4.38)
,
(4.38)
где хk, уk, zk — координаты точек приложения сил тяжести Pк частиц тела.
Сила тяжести частицы тела равна массе этой частицы, умноженной на ускорение свободного падения:
Pk = mkg. Если частица обладает объемом Uk, то ее масса тk = ρkUk, где ρk — объемная плотность. В случае однородного тела, когда ρk = const, координаты центра тяжести определятся выражениями
 ,
, ,
, ,
(4.39)
,
(4.39)
где![]() —
объем тела.
—
объем тела.
Если тело представляет
собой однородную поверхность (оболочку),
то
![]() ,
где ρ — поверхностная плотность,
Sk —
поверхность частицы, и тогда
,
где ρ — поверхностная плотность,
Sk —
поверхность частицы, и тогда
 ,
,
 ,
,
 ,
(4.40)
,
(4.40)
где S = ∑Sk — поверхность тела.
В случае однородной материальной кривой тk = ρk, где ρ — линейная плотность, lk— длина частицы, и тогда
 ,
, ,
, ,
(4.41)
,
(4.41)
где l = ∑lk — длина материальной линии. Все эти формулы служат основой для практических методов определения координат центра тяжести: метода интегрирования, разбиения и метода симметрии.
При использовании метода интегрирования тело разбивается на бесконечно малые частицы. Суммы в числителях заменяются интегралами по объему, площади или длине тела.
Если же данное тело можно разделить на конечное число частей, веса и центры тяжести которых известны, то применяются непосредственно формулы (4,38)—(3.41); этот метод называется методом разбиения.
Суть метода симметрии заключается в том, что если материальное тело имеет плоскость, ось или центр материальной симметрии, то его центр тяжести лежит в этой плоскости, на этой оси или в этом центре материальной симметрии.
Пример 1. Определить центр тяжести однородной дуги окружности радиусом R с центральным углом 2α (рис. 4.23).
Р ешение.
Так как дуга АВ
имеет ось симметрии,
то ее центр
тяжести лежит на этой оси (ось Ох),
и нам достаточно определить ху.
Длина бесконечно малого участка дуги
равна
ешение.
Так как дуга АВ
имеет ось симметрии,
то ее центр
тяжести лежит на этой оси (ось Ох),
и нам достаточно определить ху.
Длина бесконечно малого участка дуги
равна
dl = R dφ,
а длина всей дуги. l = 2R α̣.. Заменив в формуле (4.41) сумму интегралом,
Рис. 4.23 получим
![]() .
.
 Пример
2. Определить
координаты центра тяжести однородной
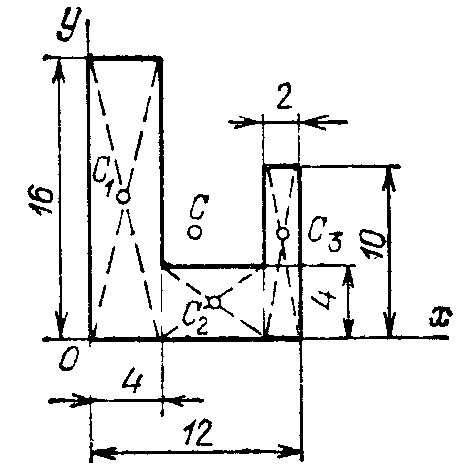
пластины, изображенной на рис. 4.24.
(размеры указаны в сантиметрах).
Пример
2. Определить
координаты центра тяжести однородной
пластины, изображенной на рис. 4.24.
(размеры указаны в сантиметрах).
Решение. Проведем оси координат и разобьем пластину на три прямоугольника. Подсчитаем их площади и координаты их центров тяжести:
Рис. 4.24 S1 = 64, x1 =2, y1= 8;
S2 = 24, x2 =7, y2 =2;
S3= 20, x3 = 11, y3 = 5.
Используя формулы (4.40), получаем
=![]() cм,
cм,
=![]() см.
см.
Найденное положение центра тяжести С показано на рисунке 4.24.
Рассмотрим теперь плоскую распределенную нагрузку, интенсивность которой изменяется по закону q = f(х) (рис. 4.25). На элементарном участке длиной dx интенсивность нагрузки можно считать постоянной и распределенную нагрузку можно заменить сосредоточенной силой dQ = qdx. Тогда, заменив входящие в формулы (4.35) и (4.36) суммы интегралами, получим, что равнодействующая плоской распределенной нагрузки равна
 (4.42)
(4.42)
п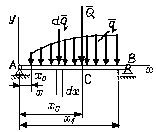 араллельна
интенсивности распределенной нагрузки
и приложена в точке С с
араллельна
интенсивности распределенной нагрузки
и приложена в точке С с
координатой (4.43)
(4.43)
Рис. 4.25
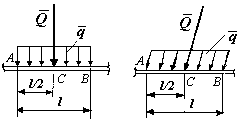
Используя эти зависимости, легко показать, что равнодействующая равномерно распределенной нагрузки (рис. 4.26) равна произведению интенсивности q на длину участка приложения нагрузки, т. е. Q = ql, а точка ее приложения делит этот участок пополам:
![]() .
.
Если же интенсивность распределенной нагрузки меняется по линейному закону (рис. 4.27), то есть эпюра имеет вид треугольника, то равнодействующая равна
Pис. 4.26
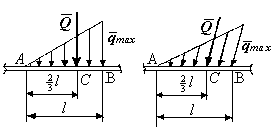
Рис. 4.27
половине произведения максимальной интенсивности на длину участка действия нагрузки Q = qтахl/2; при этом
![]() .
.