

4.1.5. Классификация связей
Аналитически связи, налагаемые на точку, тело, точки механической системы, выражаются в виде уравнений связей, в которые в общем случае могут входить координаты точек, их скорости и время. Так, например, если материальная точка движется по некоторой неподвижной поверхности, то связью является эта поверхность. Координаты точки в каждый момент времени должны удовлетворять уравнению поверхности
![]() (а)
(а)
то уравнение этой поверхности и будет уравнением связи, наложенной на точку. Если точка вынуждена двигаться по линии, то уравнениями связи являются уравнения этой линии
![]() (б)
(б)
В общем случае уравнение связи, налагаемой на систему точек, записывается в виде
![]() .
(в)
.
(в)
В зависимости от вида данной функции связи делятся так:
1) геометрические и дифференциальные,
2) стационарные и нестационарные,
3) голономные и неголономные,
4) удерживающие и неудерживающие.
К геометрическим
относятся связи, в уравнения которых
входят только координаты точек (а,
б) системы
и, может быть, время. Например, уравнение
связи в случае математического
маятника постоянной длины с подвесом
в начале координат имеет вид
![]() ,
или
,
или
![]() ,
то есть связь является геометрической.
,
то есть связь является геометрической.
Дифференциальными называются связи, уравнения которых кроме координат точек системы содержат, и первые производные от этих координат по времени и, может быть, время. Примером дифференциальной связи может служить связь, наложенная на колесо, катящееся без скольжения по неподвижной поверхности (рис. 4.10, а). В этом случае скорость центра колеса и его угловая скорость связаны между собой зависимостью, являющейся уравнением этой связи:
![]() ,
или
,
или
![]() .
.
С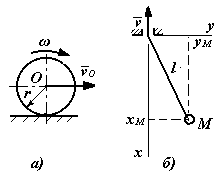 вязи,
в уравнения которых время явно не
входит, называются стационарными.
Разобранные выше связи, наложенные на
математический маятник и колесо,
являются стационарными. Если же время
входит явно в
вязи,
в уравнения которых время явно не
входит, называются стационарными.
Разобранные выше связи, наложенные на
математический маятник и колесо,
являются стационарными. Если же время
входит явно в
Рис. 4.10 уравнение связи, то такая связь будет нестационарной.
Пусть нить, на
которой подвешен математический
маятник, втягивается в отверстие,
совпадающее с точкой подвеса, с
постоянной скоростью
![]() (рис. 4.10, б). Тогда длина маятника
будет переменной: l
= lо - vt,
где l0 —
первоначальная длина маятника, и
уравнение связи принимает вид
(рис. 4.10, б). Тогда длина маятника
будет переменной: l
= lо - vt,
где l0 —
первоначальная длина маятника, и
уравнение связи принимает вид
![]() ,
или
,
или
![]() .
.
Так как время входит в уравнение явно, то эта связь нестационарная.
К голономным относятся все геометрические связи, а также те из дифференциальных, которые путем интегрирования могут быть сведены к геометрическим. Так, например, рассмотренная выше дифференциальная связь, наложенная на колесо, является голономной, так как ее можно проинтегрировать и свести к геометрической. Действительно,
,
то есть
![]()
и
 ,
,
откуда![]() ,
где С - постоянная интегрирования.
Дифференциальная связь, уравнение
которой не может быть проинтегрировано,
называется неголономной.
,
где С - постоянная интегрирования.
Дифференциальная связь, уравнение
которой не может быть проинтегрировано,
называется неголономной.
Если влияние связи
не может прекратиться или, иначе
говоря, система не может освободиться
от связи, то последняя называется
удерживающей. Если же система
может покинуть связь, то связь является
неудерживающей. Например,
жесткий невесомый стержень является
удерживающей связью для математического
маятника, так как точка М всегда
отстоит от точки подвеса О на
расстоянии l. Если же математический
маятник подвешен на гибкой нерастяжимой
нити, то в процессе движения нить может
смяться, и расстояние ОМ окажется
меньше l, т. е. точка М покинет
связь. Поэтому в данном случае гибкая
нить является неудерживающей связью,
и ее уравнение можно записать в виде
неравенства
![]() .
В дальнейшем мы будем, как правило,
рассматривать механические системы
с голономными стационарными
удерживающими связями.
.
В дальнейшем мы будем, как правило,
рассматривать механические системы
с голономными стационарными
удерживающими связями.