

4.3.7. Приведение системы сил к данному центру
Как известно, силу, приложенную к абсолютно твердому телу, можно переносить вдоль линии действия в любую точку тела. Докажем теперь, что
силу, приложенную к абсолютно твердому телу, можно переносить параллельно самой себе в любую точку тела, добавляя при этом пару сил с моментом, равным моменту переносимой силы относительно ее новой точки приложения.
Пусть сила приложена в точке А тела (рис. 4.36, а) Приложим в точке В, куда мы хотели бы перенести силу , уравновешенную систему сил таких, что
Р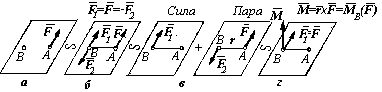 ис.
4.36
ис.
4.36
![]() (рис. 4.36, 6).
Тогда
~
(рис. 4.36, 6).
Тогда
~![]() .
.
Силы
и
образуют пару сил, поэтому полученную
систему трех сил
можно рассматривать как совокупность
силы
![]() ,
приложенной в точке В, и пары сил
,
приложенной в точке В, и пары сил
![]() (рис. 4.36, в). Пара сил
определяется ее моментом
,
равным. моменту силы
относительно точки В:
(рис. 4.36, в). Пара сил
определяется ее моментом
,
равным. моменту силы
относительно точки В:
![]() .
Таким образом, исходная сила
,
приложенная в точке А, эквивалентна
геометрически равной ей
силе, приложенной в точке В, и паре
сил с моментом равным моменту силы
относительно центра В (рис. 4.36, г),
что и требовалось доказать.
.
Таким образом, исходная сила
,
приложенная в точке А, эквивалентна
геометрически равной ей
силе, приложенной в точке В, и паре
сил с моментом равным моменту силы
относительно центра В (рис. 4.36, г),
что и требовалось доказать.
Теперь рассмотрим
произвольную систему сил
![]() ,
приложенную к абсолютно твердому телу
(рис. 4.37, а). Докажем, что эта система
сил эквивалентна совокупности одной
силы и паре сил.
,
приложенную к абсолютно твердому телу
(рис. 4.37, а). Докажем, что эта система
сил эквивалентна совокупности одной
силы и паре сил.
Процесс замены системы сил одной силой и парой сил называется приведением к заданному центру.
Выберем в теле произвольную точку О, которую назовем центром приведения Пользуясь только что доказанной теоремой о параллельном переносе силы, перенесем в точку О параллельно самим себе все силы системы, добавляя каждый раз пару сил с моментами,
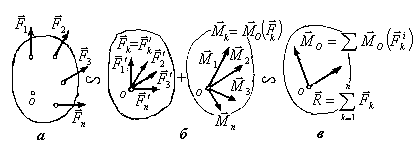
Рис. 4.37
равными
моментам переносимой силы относительно
центра приведения О. В результате
этой операции мы получим систему
сходящихся сил
![]() таких, что
таких, что![]() ,
и систему пар сил (
,
и систему пар сил (![]() ),
моменты которых равны моментам
исходных сил относительно точки О:
),
моменты которых равны моментам
исходных сил относительно точки О:
![]() (рис. 4.37, б). Как было доказано выше,
систему сходящихся сил можно заменить
ее равнодействующей
(рис. 4.37, б). Как было доказано выше,
систему сходящихся сил можно заменить
ее равнодействующей
![]() ,
,
а систему пар сил — одной парой с моментом, равным векторной сумме моментов слагаемых пар:
![]() .
.
Таким образом,
исходная система сил заменена одной
силой
и
одной парой сил с моментом
![]() (рис.
4.37, в), что и требовалось доказать.
По определению, данному в предыдущем
параграфе, полученная сила
и момент пары сил
являются главным вектором и главным
моментом исходной системы сил в точке
О.
(рис.
4.37, в), что и требовалось доказать.
По определению, данному в предыдущем
параграфе, полученная сила
и момент пары сил
являются главным вектором и главным
моментом исходной системы сил в точке
О.
Следовательно, произвольная система сил, приложенных к абсолютно твердому телу, в результате приведения ее к произвольному центру может быть заменена одной силой, равной главному вектору исходной системы сил, и одной парой сил, с моментом, равным главному моменту исходной системы сил относительно точки О, причем
![]() ,
.
(4.54)
,
.
(4.54)
4.3.8. Масса и центр масс системы материальных точек
Масса М системы п материальных точек равна арифметической сумме масс тk всех ее точек, то есть
![]() (4.55)
(4.55)
Центром масс
системы п материальных точек
называется геометрическая точка С,
радиус-вектор
![]() которой определяется выражением
которой определяется выражением
![]() (4.56)
(4.56)
где
![]() —
радиус-вектор k-й точки. Спроектировав
это равенство на оси координат, получим
выражения для координат центра масс
системы материальных точек:
—
радиус-вектор k-й точки. Спроектировав
это равенство на оси координат, получим
выражения для координат центра масс
системы материальных точек:
![]() ,
,
![]() ,
,
![]() ,
(4.57)
,
(4.57)
где
![]() —
координаты точек системы. Если центр
масс находится в начале координат, то
=
0 и, следовательно,
—
координаты точек системы. Если центр
масс находится в начале координат, то
=
0 и, следовательно,
![]() ,
,
или
![]() ,
,
![]() ,
,
![]() .
(4.58)
.
(4.58)
Для тел малых размеров, находящихся вблизи поверхности Земли, можно принять, что mk = Pk/g, где Рk — вес k-й точки, и поэтому выражение для радиус-вектора центра масс принимает вид
 (4.59)
(4.59)
То есть при инженерных расчетах можно считать, что центр масс совпадает с центром тяжести механической системы.