

4.3. Введение в динамику механической системы
4.3.1. Дифференциальные уравнения движения механической системы
Изученная теория движения материальной точки под действием приложенных к ней сил применима для анализа движения реальных тел, если размерами этих тел можно пренебречь. Но в большинстве случаев это недопустимо, тогда для решения задачи применяется теория движения системы материальных точек механической системы.
Механической системой материальных точек или тел называется такая их совокупность, в которой положение или движение каждой точки зависит от положения всех остальных точек.
Материальное тело – это механическая система, образованная непрерывной совокупностью материальных точек (частиц).
Совокупность тел, между которыми нет ни каких сил взаимодействия, механическую систему не образует. В соответствии со сказанным, силы, действующие на точки или на тела системы, можно разделить на внешние и внутренние.
Сила внешняя
– сила, действующая на какую-либо
материальную точку механической системы
со стороны тел, не принадлежащих
рассматриваемой механической системы.
Обозначим ее
![]() .
.
Внутренняя
сила –
сила, действующая на какую-либо
материальную точку механической системы
со стороны других материальных точек,
принадлежащих рассматриваемой
механической системы обозначим
![]() .
.
Как внешние, так и внутренние силы могут быть в свою очередь активными или силами реакции связей. Разделение на внешние и внутренние является условным и зависит от того, движение какой системы сил мы рассматриваем. Внутренние силы обладают следующими свойствами:
Геометрическая
сумма (главный вектор) всех внутренних
сил равен нулю. Действительно по третьему
закону динамики любые две точки системы
действуют друг на друга силами, равными
по модулю и противоположно направленными
сумма которых равна нулю (рис. 4.16). Так
как аналогичный результат имеет место
для любой пары точек, то
![]() ;
;
Сумма моментов (главный момент всех внутренних сил системы) относительно любого центра или оси равняется нулю
![]() ,
,
следовательно, для всей системы:
![]() .
.
Д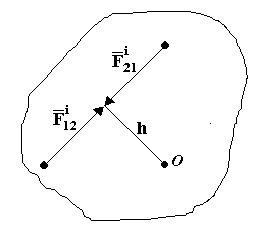 ля
анализа движения механической системы
самый прямой метод состоит в ее трактовке
как совокупности материальных точек и
в использовании для анализа ее движения
мето-дами динамики точки. Так, пусть нам
дана система состоящая из п
материаль-
ля
анализа движения механической системы
самый прямой метод состоит в ее трактовке
как совокупности материальных точек и
в использовании для анализа ее движения
мето-дами динамики точки. Так, пусть нам
дана система состоящая из п
материаль-
Рис. 4.16 ных точек.
Освободим мысленно каждую из точек от наложенных на нее внешних и внутренних связей и приложим к ней равнодействующие действующих на нее внешних и внутренних сил. Тогда все точки модно считать свободными и для них модно записать основное уравнение динамики точки:
![]() , (k
= 1,2,…,n).
(4.33)
, (k
= 1,2,…,n).
(4.33)
Спроектировав эти векторные равенства на оси декартовой системы координат, получим систему 3п дифференциальных уравнений:
![]() ,
,
![]() ,
(k
= 1,2,…, n).
,
(k
= 1,2,…, n).
![]() ,
,
Эти 3п уравнений являются дифференциальными уравнениями движения системы материальных точек. Проинтегрировав эту систему уравнений второго порядка и определив по начальным условиям произвольные постоянные, мы найдем движение каждой точки и, следовательно, системы в целом.
Но такой метод решения для большинства практических задач неприемлем из-за математической сложности. Трудности возникают еще из-за того, что ни внутренние силы, ни силы реакции связей, как правило, неизвестны. В большинстве задач не требуется определять движение каждой точки системы, а достаточно найти параметры, характеризующие движение системы в целом. Эти суммарные характеристики движения механической системы определяются с помощью общих теорем динамики, являющиеся следствием дифференциальных уравнений движения системы (4.33).