

5.2. Теорема Вариньона о моменте равнодействующей
Пусть на твердое
тело действует система сил (
),
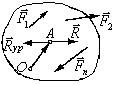
имеющая равнодействующую, приложенную
в точке А тела (рис. 5.2). Приложим в
точке А уравновешивающую силу
ур
равную и противоположно направленную
равнодействующей,
![]() =
-
Тогда система сил (
,
ур)
будет уравновешенной, то есть будет
находиться в равновесии, и поэтому
ее главный момент относительно
произвольной точки О равен нулю:
=
-
Тогда система сил (
,
ур)
будет уравновешенной, то есть будет
находиться в равновесии, и поэтому
ее главный момент относительно
произвольной точки О равен нулю:
Поскольку ур= - , то
![]()
и, следовательно,
![]()
Отсюда получаем формулу, являющуюся математической
Рис. 5.2 записью теоремы Вариньона:
![]() ,
(5.3)
,
(5.3)
то есть если система сил, приложенных к твердому телу, имеет равнодействующую, то момент равнодействующей относительно произвольной точки равен сумме моментов всех сил системы относительно той же точки.
Проведем через точку О прямоугольную систему координат Oxyz и спроектируем на ее оси уравнение (5.3). Тем самым мы получим теорему Вариньона в проекциях на оси декартовой системы координат:
![]() ,
,
![]() ,
(5.4)
,
(5.4)
![]() ,
,
то есть момент равнодействующей системы сил относительно произвольной оси равен сумме моментов всех сил системы относительно той же оси.
Теоремой Вариньона удобно пользоваться при определении моментов силы как относительно точки, так и относительно оси.
П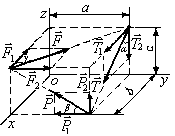 ример.
Найти моменты сил
ример.
Найти моменты сил
![]() ,
,
действующих вдоль диагоналей граней
прямоугольного параллелепипеда (рис.
123), относительно осей х,
у, z.
Размеры
параллелепипеда даны на рисунке.
,
,
действующих вдоль диагоналей граней
прямоугольного параллелепипеда (рис.
123), относительно осей х,
у, z.
Размеры
параллелепипеда даны на рисунке.
Решение. Начнем с определения моментов силы . Для этого разложим ее по правилу параллелограмма на составляющие 1 и 2,
Рис. 5.3 параллельные осям Ох и Oy. Сила является равнодействующей системы сил ( 1 , 2 ). Поэтому по теореме Вариньона
![]() ,
,
так
как
![]() =
0, поскольку сила
1
параллельна
оси Ох.
=
0, поскольку сила
1
параллельна
оси Ох.
Аналогично
![]()
![]() .
.
Разложив силу на составляющие 1, 2 вдоль осей Ох и Оу находим
![]()
![]()
![]()
Предлагаем читателю самостоятельно определить моменты силы .
5.3. Условия равновесия систем сходящихся и параллельных сил
Рассмотренные выше аналитические условия равновесия произвольной системы сил, приложенных к твердому телу, можно значительно упростить при действии на тело систем сил частного вида, а именно систем сходящихся и параллельных сил. Найдем эти условия.
С истема
сил, линии действия которых пересекаются
в одной точке, называется системой
сходящихся сил. При равновесии
такой системы п сил, действующих
на твердое
истема
сил, линии действия которых пересекаются
в одной точке, называется системой
сходящихся сил. При равновесии
такой системы п сил, действующих
на твердое
Рис. 5.4 тело (рис. 5.4), как и в случае произвольной системы, главный вектор системы сил и ее главный момент относительно любой точки должны быть равны нулю:
![]() ,
,
![]() .
.
Введем в рассмотрение
радиус-вектор
![]() точки
А пересечения сил относительно
центра О и радиус-вектор
точки Мk
приложения k-й
силы относительно точки А;
точки
А пересечения сил относительно
центра О и радиус-вектор
точки Мk
приложения k-й
силы относительно точки А;
Ясно, что
![]() .
Тогда
.
Тогда
![]() ,
или
,
или
![]() (
(![]() ибо радиус-вектор
,
коллинеарен вектору силы
ибо радиус-вектор
,
коллинеарен вектору силы
![]() ).
).
Из полученного выражения для главного момента следует, что при равенстве нулю главного вектора системы сходящихся сил ее главный момент относительно любого центра тождественно равен нулю. Таким образом, для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы ее главный вектор равнялся нулю:
, (5.5)
и аналитические условия равновесия принимают вид
![]() ,
,
![]() ,
,
![]() .
(5.6)
.
(5.6)
Определим теперь аналитические условия равновесия системы параллельных сил, то есть системы сил, линии действия которых параллельны. Так как выбор осей координат произволен, направим ось Оz параллельно линиям действия сил системы. При таком выборе осей координат проекции всех сил на оси Ох и Oy, а также их моменты относительно оси Oz равны нулю и уравнения
, , .
выполняются тождественно; поэтому из шести условий (5.2) равновесия произвольной системы сил в случае параллельных сил остаются только три:
![]() ,
,
![]() ,
,
![]() .
(5.7)
.
(5.7)
Следовательно, для равновесия системы параллельных сил необходимо и достаточно, чтобы сумма их проекций на ось, параллельную силам, и сумма их моментов относительно двух других осей координат были равны нулю.
Пример
1.
Найти усилия S1
и S2
в стержнях АВ
и АС
и натяжение Т троса AD
(рис. 5.5), если известно, что
![]() СВА
=
BCA
= α
= 60°,
ЕАD
= β=
30°, вес груза М
равен Р
=300 Н, плоскость АВС
горизонтальна и в точках А,
В и
С стержни
закреплены шарнирами.
СВА
=
BCA
= α
= 60°,
ЕАD
= β=
30°, вес груза М
равен Р
=300 Н, плоскость АВС
горизонтальна и в точках А,
В и
С стержни
закреплены шарнирами.
Р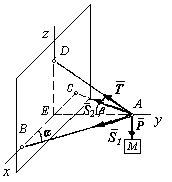 ешение.
В качестве
тела, равновесие которого мы будем
рассматривать в дайной задаче, выберем
узел А.
На него действуют активная сила Р и
реакции стержней АВ,
АС
и троса АD.
Реакция троса Т
направлена вдоль троса к точке D.
Реакции шарнирно закрепленных и
нагруженных только в шарнирах прямых
стержней направлены вдоль осей
стержней. Поэтому направим реакции S1и
S2
от
ешение.
В качестве
тела, равновесие которого мы будем
рассматривать в дайной задаче, выберем
узел А.
На него действуют активная сила Р и
реакции стержней АВ,
АС
и троса АD.
Реакция троса Т
направлена вдоль троса к точке D.
Реакции шарнирно закрепленных и
нагруженных только в шарнирах прямых
стержней направлены вдоль осей
стержней. Поэтому направим реакции S1и
S2
от
Рис.
5.5 узла А
к точкам В и
С, предполагая, что стержни растянуты.
Таким образом, под действием системы
сходящихся сил (![]() )
узел А
находится в равновесии.
)
узел А
находится в равновесии.
Для определения неизвестных реакций проведем оси координат (рис. 214) и составим уравнения равновесия:
(1)
![]() =
S1
cosα
-
S2
cos
=
S1
cosα
-
S2
cos![]() =0,
=0,
(2)
![]() =
- S1
sinα
- S2
sinα
-Т
cosβ = 0,
=
- S1
sinα
- S2
sinα
-Т
cosβ = 0,
(3) = Т sinβ – P=0.
Из уравнения (1) находим S1 = S2. Из уравнения (3) получаем Т = P/sinβ = 600 Н, а из уравнения (2) следует, что S1= S2 = - T cosβ/(2sinα) = - 300 Н. Отрицательные значения усилий S1 и S2 показывают, что в действительности стержни сжаты и их реакции направлены к узлу А (в данной конструкции это можно было предвидеть). Полученные усилия в стержнях равны между собой, что тоже можно было предвидеть (из соображений симметрии).
П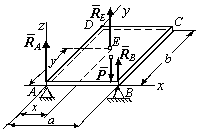 ример
2. Однородная
прямоугольная пластина ABCD
покоится в
горизонтальном положении на трех
точечных опорах, две из которых
расположены в вершинах прямоугольника
А
и В, а
третья — в некоторой точке Е
(рис. 5.6), Вес пластины равен Р,
а давления на опоры в точках А
и
В равны Р/4
и Р/5
соответственно. Найти давление RB
на опору
в точке Е
и координаты этой точки, если длины
сторон пластины равны а
и b.
ример
2. Однородная
прямоугольная пластина ABCD
покоится в
горизонтальном положении на трех
точечных опорах, две из которых
расположены в вершинах прямоугольника
А
и В, а
третья — в некоторой точке Е
(рис. 5.6), Вес пластины равен Р,
а давления на опоры в точках А
и
В равны Р/4
и Р/5
соответственно. Найти давление RB
на опору
в точке Е
и координаты этой точки, если длины
сторон пластины равны а
и b.
Решение.
Рассмотрим равновесие пластины ABCD.
На нее действует активная вертикальная
сила Р
и реакции
![]() ,
,
![]() ,
,
Рис.
5.6
![]() гладких точечных опор А,
В и
Е, направленные
нормально плоскости пластины. Это
система параллельных сил, поэтому
проведем ось Аz
вертикально,
а оси Ах
и Ау
совместим со сторонами пластины. Составим
уравнения равновесия:
гладких точечных опор А,
В и
Е, направленные
нормально плоскости пластины. Это
система параллельных сил, поэтому
проведем ось Аz
вертикально,
а оси Ах
и Ау
совместим со сторонами пластины. Составим
уравнения равновесия:
(1)
![]() ,
,
(2)
![]() ,
,
(3)
![]() .
.
Число неизвестных (RE, х, у) равно числу условий равновесия, поэтому задача статически определима. Решив полученную систему уравнений, найдем неизвестные:
RE = P - RA - RB = (11/20) P,
y = Pb/(2RE) = (10/11)b,
x = a(P - 2RB)/(2RE) = (6/11)a.