

4.5.2. Кинетический момент системы материальных точек
Кинетическим моментом системы материальных точек относительно центра О называется геометрическая сумма кинетических моментов всех точек системы относительно того же центра:
![]() .
(4.90)
.
(4.90)
Кинетический
момент системы
![]() приложен
к точке О, относительно
которой он вычисляется.
приложен
к точке О, относительно
которой он вычисляется.
Е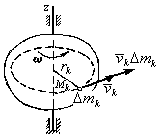 сли
спроектировать кинетический момент
относительно центра О на оси
координат, проходящие через этот центр,
то получим проекции кинетическою момента
на эти оси (кинетические моменты
системы относительно осей
сли
спроектировать кинетический момент
относительно центра О на оси
координат, проходящие через этот центр,
то получим проекции кинетическою момента
на эти оси (кинетические моменты
системы относительно осей
Рис. 4.47 координат):
![]() ,
,
![]() ,
,
![]() .
.
Определим
кинетический момент тела относительно
его неподвижной оси вращения z (рис.
4.47). Для этого разобьем тело на бесконечно
большое количество элементов массой![]() и получим
и получим
![]() .
.
Так как
![]() ,
то
,
то
![]() .
Как известно, входящая в данное выражение
сумма равна моменту инерции тела
относительно оси z:
.
Как известно, входящая в данное выражение
сумма равна моменту инерции тела
относительно оси z:
![]() .
Тогда окончательно
.
Тогда окончательно
![]() .
(4.91)
.
(4.91)
Следовательно, кинетический момент твердого тела относительно оси вращения равен произведению момента инерции тела относительно данной оси на угловую скорость тела.
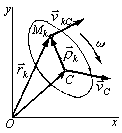
Аналогичным образом
найдем кинетический момент плоского
материального тела, совершающего
плоскопараллельное движение, относительно
неподвижного центра О, лежащего в
плоскости движения тела. Разобьем
тело на бесконечно большое число
элементов массой
![]() ,
каждый из которых можно считать
материальной точкой (рис. 4.48). Скорость
любой точки тела определяется равенством:
,
каждый из которых можно считать
материальной точкой (рис. 4.48). Скорость
любой точки тела определяется равенством:
![]()
 ,
,
где
—
скорость центра масс тел,
![]() и
и
![]() —
скорость и радиус-вектор k-й
точки тела относительно центра масс, ω
— угловая скорость тела.
—
скорость и радиус-вектор k-й
точки тела относительно центра масс, ω
— угловая скорость тела.
Так как
![]() (рис. 4.48),
(рис. 4.48),
Рис. 4.48 то искомый кинетический момент будет равен
 Преобразуем каждое
из четырех полученных слагаемых:
Преобразуем каждое
из четырех полученных слагаемых:
![]() ,
,
где![]() —
масса тела,
—
количество движения тела, то есть первое
слагаемое определяется движением
центра масс тела; второе и третье
слагаемые равны нулю:
—
масса тела,
—
количество движения тела, то есть первое
слагаемое определяется движением
центра масс тела; второе и третье
слагаемые равны нулю:

![]() ,
,
Поскольку
![]() ,
что следует из определения центра
масс. Так как
,
что следует из определения центра
масс. Так как
![]() ,
то модуль последнего слагаемого
равен
,
то модуль последнего слагаемого
равен

где
JzC
— момент инерции тела относительно
оси, перпендикулярной плоскости его
движения и проходящей через центр масс,
то есть это слагаемое (обозначим его
![]() )
определяется вращением фигуры вокруг
центра масс. Тогда
)
определяется вращением фигуры вокруг
центра масс. Тогда
![]() . (4.92)
. (4.92)
Полученное выражение свидетельствует о том, что кинетический момент в рассматриваемом примере зависит как от движения центра масс тела, так и от его вращательного движения по отношению к центру масс. Этот результат является частным случаем более общей теоремы, которую мы сформулируем без доказательства:
кинетический момент механической системы относительно неподвижного центра равен геометрической сумме момента относительно этого центра количества движения системы, условно приложенного в центре масс, и кинетического момента системы относительно центра масс в ее относительном движении по отношению к центру масс.
4.5.3. Теорема об изменении кинетического момента системы материальных точек
Запишем для механической системы, состоящей из п материальных точек, дифференциальные уравнения движения в векторной форме (4.30):
![]() ,
k = l,2,...,n,
,
k = l,2,...,n,
где
![]() и
и
![]() —
соответственно равнодействующие
приложенных к k-й точке внешних и
внутренних сил. Умножим левые и правые
части этих равенств слева векторно на
радиус-вектор каждой точки относительно
неподвижного центра О:
—
соответственно равнодействующие
приложенных к k-й точке внешних и
внутренних сил. Умножим левые и правые
части этих равенств слева векторно на
радиус-вектор каждой точки относительно
неподвижного центра О:
![]() ,
k = 1,2, ..., п.
,
k = 1,2, ..., п.
Нетрудно показать,
что
![]() .
.
Действительно,
![]() так
как
так
как
![]() как векторное произведение коллинеарных
векторов. Постоянный множитель тk
можно внести под знак производной,
следовательно,
как векторное произведение коллинеарных
векторов. Постоянный множитель тk
можно внести под знак производной,
следовательно,
![]() ,
k =1,2,..., п.
,
k =1,2,..., п.
Сложим все эти п уравнений:
![]() .
.
Операции суммирования и дифференцирования переместимы, и поэтому
![]() ,
,
где
![]() -
кинетический момент системы относительно
неподвижного центра О.
-
кинетический момент системы относительно
неподвижного центра О.
По свойству
внутренних сил их главный момент равен
нулю, то есть
![]() .
Кроме того,
.
Кроме того,
![]() - сумма моментов внешних сил системы
относительно центра О, то есть
главный момент внешних сил системы
относительно точки О. Поэтому
окончательная запись теоремы об
изменении кинетического момента системы
принимает вид
- сумма моментов внешних сил системы
относительно центра О, то есть
главный момент внешних сил системы
относительно точки О. Поэтому
окончательная запись теоремы об
изменении кинетического момента системы
принимает вид
![]() , (4.93)
, (4.93)
То есть производная по времени от кинетического момента системы материальных точек относительно неподвижного центра равна главному моменту внешних сил системы относительно того же центра.
Спроектировав это равенство на неподвижные оси прямоугольной системы координат, получим запись теоремы в проекциях на эти оси:
![]() ,
,
![]() ,
(4.94)
,
(4.94)
![]() .
.
Из формул (4.94) следует, что внутренние силы не влияют на изменение кинетического момента системы. Поэтому применение теоремы для исследования движения механической системы позволяет (в той же степени, что и использование теорем об изменении количества движения и движения центра масс системы) исключить из рассмотрения внутренние силы.
Из уравнения (4.93), в частности, следует, что если главный момент внешних сил относительно какого-нибудь неподвижного центра равен нулю, то кинетический момент относительно этого центра остается постоянным, то есть если
![]() то
=
const. (4.95)
то
=
const. (4.95)
Если же сумма моментов внешних сил системы относительно какой-либо неподвижной оси равна нулю, то соответствующая проекция кинетического момента остается постоянной, то есть если
![]() ,
то Lx
= const. (4.96)
,
то Lx
= const. (4.96)
Утверждения (4.95) и (4.96) представляют собой закон сохранения кинетического момента системы.
Закон сохранения кинетического момента часто встречается в природе и используется в технических приложениях. Так, выполнение одного из элементов фигурного катания на коньках, вращения на месте с переменной угловой скоростью, основано на этом законе. Действительно, сумма моментов действующих на фигуриста внешних сил (веса и реакции льда) относительно оси вращения равна нулю, и кинетический момент фигуриста относительно этой оси остается постоянным, то есть Jzω = const. Поэтому для увеличения угловой скорости ω фигурист прижимает руки к туловищу: момент инерции Jz уменьшается, а угловая скорость увеличивается. Если же фигурист хочет замедлить вращение, то он разводит руки в стороны; при этом Jz увеличивается, а ω уменьшается.
Из наиболее интересных технических приложений закона сохранения кинетического момента является использование маховика, установленного в космическом корабле, для изменения угловой ориентации последнего. Предполагается, что космический корабль движется вдали от центров притяжения, и внешние силы на него не действуют. Поэтому центр масс корабля движется по инерции и может рассматриваться как неподвижная точка. Если внешних сил нет, то и главный момент относительно центра масс равен нулю, так что кинетический момент корабля относительно его центра масс и любой его центральной оси остается постоянным, в частности равным нулю. Поэтому для изменения углового положения корпуса корабля начинают вращать маховик в направлении, противоположном желательному повороту корпуса. Так как до вращения кинетический момент корабля равен нулю, то он должен оставаться равным нулю и при вращении маховика, а это означает, что корпус будет поворачиваться в сторону, противоположную вращению маховика. Когда достигается желаемый угол поворота корпуса, маховик останавливается, и вращение корабля прекращается.
Если за центр, относительно которого определяется кинетический момент системы, выбрана неинерциально движущаяся точка, то формула (4.92) значительно усложняется. Однако если этой подвижной точкой является центр масс системы, то формула остается внешне без изменения:
![]() , (4.97)
, (4.97)
где
![]() —
кинетический момент системы в ее движении
относительно поступательно движущейся
системе координат, имеющей начало в
центре масс системы.
—
кинетический момент системы в ее движении
относительно поступательно движущейся
системе координат, имеющей начало в
центре масс системы.