

4.2.2. Движение несвободной материальной точки
Рассмотрим материальную точку М, движущуюся под действием задаваемой силы по некоторой поверхности, являющейся для точки связью (рис. 4.14). Пусть уравнение этой поверхности имеет вид: f(x, y, z)=0.
Рассмотрим случай, когда эта поверхность идеально гладкая. В этом случае реакция связи направлена по нормали к поверхности и называется нормальной реакцией. Согласно принципу освобождаемости от связи отбросим связь, заменив ее действие реакцией . Тогда для несвободной материальной точки можно написать основное уравнение динамики:
![]() .
(4.15)
.
(4.15)
С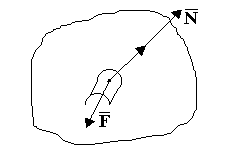 проектировав
векторы обеих частей этого равенства
на декартовы оси координат, получим
дифференциаль-ные уравнения движения
материальной точки М
проектировав
векторы обеих частей этого равенства
на декартовы оси координат, получим
дифференциаль-ные уравнения движения
материальной точки М
 ,
(4.16)
,
(4.16)
где Х, У, Z – проекции силы на оси координат, а проекции нормальной реакции Nx, Ny, Nz –
Рис. 4.14 на те же оси, то есть
 (4.17)
(4.17)
Косинусы углов, образованных направлением нормальной реакции с осями координат, можно определить по формулам дифференциальной геометрии как направляющие косинусы внешней нормали к поверхности, имеющей уравнение f(x, y, z)=0.

 (4.18)
(4.18)
где
![]() .
(4.19)
.
(4.19)
Если
задано уравнение поверхности, то вектор
с проекциями функции f,
называется градиентом функции f
![]() ,
а N=grad
f,
здесь
- называется неопределенным множителем
Лагранжа.
,
а N=grad
f,
здесь
- называется неопределенным множителем
Лагранжа.
Подставляя в (4.17) выражения (4.18) получим
![]() ;
;
![]() ;
;
![]()
Тогда, подставив найденные значения в (4.16) будем иметь
 (4.20)
(4.20)
Уравнения (4.20) называются дифференциальными уравнениями движения несвободной материальной точки в форме Лагранжа, или уравнениями Лагранжа первого рода.
Из трех дифференциальных
уравнений (4.20) и уравнения связи f(x,
y,
z)
= 0
определяют в зависимости от времени
четыре неизвестные величины: x,
y,
z,
.
Получив
координаты точки х,
у, z как
функции времени, определяют движение
точки М.
Вычислив множитель Лагранжа
находят из
![]() алгебраическое значение нормальной
реакции поверхности по формуле
алгебраическое значение нормальной
реакции поверхности по формуле
![]() .
(4.21)
.
(4.21)
При движении точки по неподвижной гладкой кривой удобно пользоваться дифференциальными уравнениями в проекциях на естественные оси, так как траектория точки известна:
 (4.22)
(4.22)
а уравнением связи является уравнение кривой.
4.2.3. Дифференциальные уравнения относительного движения материальной точки
Два первых закона классической механики и все полученные на их основе уравнения справедливы для движения материальной точки по отношению к инерциальной системе отсчета.
Изучим движение материальной точки по отношению к инерциальной системе. Пусть система отсчета О1zhx - инерциальная система (условно неподвижная), а связанная с ней система Oхуz – неинерциальная (подвижная) система отсчета (рис. 4.15). Движение точки М по отношению к системе О1zhx называется абсолютным, а движение точки по отношению к системе Oхуz называется относительным.
Основное уравнение динамики для абсолютного движения точки М имеет вид:
![]() ,
(4.23)
,
(4.23)
где
- абсолютное ускорение материальной
точки, а
![]() -геометрическая
сумма приложенных с точке сил.
-геометрическая
сумма приложенных с точке сил.
В разделе «кинематика»
установлено, что в случае непоступательного
переносного движения абсолютное
ускорение точки
равно геометрической сумме трех
ускорений: переносного
![]() ,
относительного
,
относительного
![]() и поворотного (кориолисового)
и поворотного (кориолисового)
![]() ,
то есть
=
+
+
.
Подставив это значение
в
уравнение (4.23), получим:
,
то есть
=
+
+
.
Подставив это значение
в
уравнение (4.23), получим:
т + т + т = .
Из полученного уравнения определим
т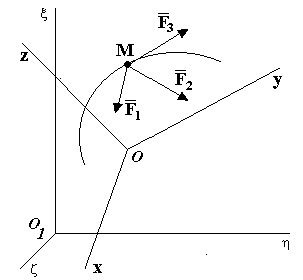 =
-
т
-
т
(4.24)
=
-
т
-
т
(4.24)
Введем два вектора
![]() ,
,
![]() ,
численно равные произведениям
,
численно равные произведениям
![]() и
и![]() и направленные противоположно ускорениям
и направленные противоположно ускорениям
![]() .
Эти векторы
.
Эти векторы
Рис. 4.15 назовем переносной и кориолисовой силами инерции. Подставив эти векторы в уравнение (4.24) получим:
![]() (4.25)
(4.25)
Уравнение (4.25) представляет собой динамическую теорему Кориолиса - основное уравнение динамики относительного движения материальной точки.
Сопоставляя уравнения (4.23) и (4.25), заключаем, что в случае непоступательного переносного движения, относительное движение материальной точки происходит как абсолютное под действием приложенных к точке сил и условно приложенных к ней переносной и кориолисовой сил инерции.
Рассмотрим частные случаи относительного движения материальной точки, соответствующие различным видам переносного движения.
Подвижная система отсчета движется поступательно, тогда wе=0. Следовательно,
 ,
тогда
,
тогда
![]()
Система движется прямолинейно, равномерно, тогда wе=0, aе=0, следовательно Фк=Фе=0, тогда
![]()
- это принцип относительности Гилилея-Ньютона. Этот принцип говорит о том, что система координат, движущаяся прямолинейно по отношению к инерциальной системе отсчета сама является инерциальной.
Если точка в подвижной системе координат не движется,

 ,
то есть
,
то есть
 ,
Фk
= 0. Тогда имеем условие относительного
равновесия точки
,
Фk
= 0. Тогда имеем условие относительного
равновесия точки
![]() .
.
Эта формула выражает статическую теорему Кориолиса:
В случае когда материальная точка находится в состоянии относительного покоя, геометрическая сумма приложенных к точке сил и переносной силы равна нулю.