

4.1.3. Связи и реакции связей
Основные Законы механики Галилея — Ньютона сформулированы для свободной материальной точки, то есть для точки, на перемещение которой не наложено никаких ограничений, и движение которой зависит только от начальных условий и действующих на нее сил. Однако как в природе, так и в искусственных сооружениях и машинах, созданных человеком, мы чаще имеем дело с несвободными материальными телами, перемещения которых в пространстве ограничены другими телами. Любое тело, ограничивающее свободу перемещения данного тела, называется связью, наложенной на это тело. Например, для лампы, подвешенной на шнуре, связью является шнур; для книги, лежащей на столе, связью является стол; для двери, подвешенной на петлях, связями являются петли и т. д.
Таким образом, ограничения, налагаемые на положение и скорости точек механической системы, которые должны выполняться при любых действующих на систему силах, называются связями, наложенными на механическую систему. Силы, с которыми связи действуют на рассматриваемое тело, называются реакциями связей. Если считать силу, с которой тело действует на связь, действием, то реакция связи является противодействием и приложена к телу. Эти силы, будучи равны по модулю и противоположны по направлению, не являются взаимно уравновешенными, так как они приложены к разным телам.
В механической системе ограничения на перемещения и скорости ее точек (тел) накладываются как со стороны тел, не входящих в систему, так и со стороны точек (тел) самой системы. В соответствии с этим делением и реакции связей подразделяются на внешние и внутренние.
Связи, осуществляемые телами, не входящими в рассматриваемую механическую систему, называются внешними, а связи, взаимно осуществляемые точками (телами) системы,— внутренними.
В отличие от всех остальных сил, действующих на механическую систему и называемых активными силами, реакции внешних и внутренних связей называются пассивными. Модуль и направление каждой активной силы не зависит от других сил, приложенных к системе (например, силы тяжести и др.), модули же и направления реакций связей зависят от совокупности действующих на систему сил, а также и от движения системы.
Анализ состояния движения или равновесия несвободной механической системы, то есть системы, на которую наложены связи, основан на принципе освобождаемости от связей (аксиоме связей). В соответствии с аксиомой связи любую несвободную механическую систему (несвободное тело, несвободную точку) можно рассматривать как свободную, если ее мысленно освободить от связей, заменив их действия на систему соответствующими реакциями связей.
Правильное определение направлений реакций связей играет очень важную роль при решении задач кинетики. Поэтому рассмотрим основные виды связей и их реакции. При установлении направления реакции связи используется правило, по которому направление реакции связи противоположно тому, куда связь не дает перемещаться телу.
Г
 ладкая
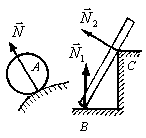
поверхность (рис. 4.1). Поверхность
называется гладкой, если при решении
данной задачи можно пренебречь силами
трения, возникающими в точках контакта
с поверхностью рассматривае-мого тела.
Такая связь препятствует
ладкая
поверхность (рис. 4.1). Поверхность
называется гладкой, если при решении
данной задачи можно пренебречь силами
трения, возникающими в точках контакта
с поверхностью рассматривае-мого тела.
Такая связь препятствует
Рис. 4.1 перемещению тела только в направле-нии общей нормали к поверхностям соприкасающихся тел в точках их контакта. Поэтому реакция данной связи N направлена по этой общей нормали и приложена в точке касания тел.
Гибкая нерастяжимая нить (трос, канат, цепь и др.) (рис. 4.2). Эта связь не дает перемещаться телу только вдоль линии натяжения нити, поэтому ее реакция Т направлена вдоль нити к точке подвеса.
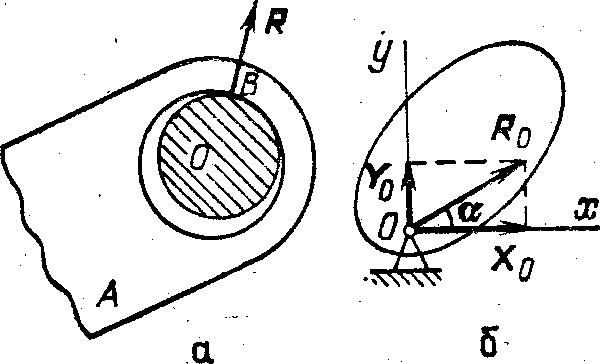
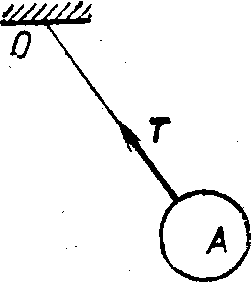
Рис. 4.2 Рис. 4.3
3. Гладкий цилиндрический шарнир или подшипник (рис. 4.3). Часто отдельные части конструкции соединяются друг с другом шарнирами. Шарнир — устройство, допускающее относительное вращение соединенных с его помощью тел. Если трением в шарнире пренебрегают, то он называется гладким. Цилиндрический шарнир позволяет соединенным с его помощью телам поворачиваться вокруг оси шарнира и скользить вдоль этой оси. Конструктивно это соединение можно представить (рис. 4.3, а) в виде цилиндрического стержня О, вставленного в цилиндрическое отверстие тела А.
В зависимости от нагрузки поверхности стержня и отверстия соприкасаются в какой-то точке В. Поэтому реакция (силами трения пренебрегаем) будет направлена по нормали к этим поверхностям в точке их соприкосновения. Указать заранее эту точку невозможно, и о реакции можно сказать только то, что она лежит в плоскости, перпендикулярной оси шарнира. Поэтому при освобождении тела от шарнирной связи реакцию RО (рис, 4.3, б) раскладывают на две составляющие ХО и YО, параллельные осям координат в плоскости, перпендикулярной оси шарнира. В процессе решения задачи находят каждую из них, а по составляющим находят модуль и направление полной реакции:
![]() ,
,
![]() ,
,
![]() .
.
Шарнирные опоры могут быть подвижными и неподвижными.
П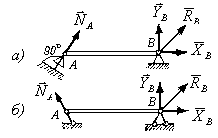 одвижная
шарнирная опора (рис. 4.4, опоры А)
дает возможность балке поворачиваться
вокруг нее и перемещаться или вдоль
плоскости катков (рис. 4.4, а), или в
направлении
одвижная
шарнирная опора (рис. 4.4, опоры А)
дает возможность балке поворачиваться
вокруг нее и перемещаться или вдоль
плоскости катков (рис. 4.4, а), или в
направлении
Рис. 4.4 перпендикулярном оси стержня опоры (рис. 4.4, б). В направлениях же, перпендикулярных рассмотренным, перемещения балки исключены. Поэтому реакция данной опоры na направлена или перпендикулярно плоскости катков, или вдоль стержня опоры.
Неподвижная шарнирная (рис. 4.4, опоры В) дает возможность балке только поворачиваться вокруг нее в плоскости чертежа, то есть является цилиндрическим шарниром. Поэтому направление реакции RВ заранее неизвестно, и ее раскладывают на две составляющие ХВ и YВ.
4. Сферический (шаровой) шарнир и подпятник (рис. 4.5). Сферический шарнир (рис. 4.5, a) допускает относительное вращение соединяемых тел вокруг трех осей, но препятствует любым перемещениям точки крепления (примером сферического шарнира может служить крепление рукоятки переключения скоростей большинства автомобилей). В связи с этим направление реакции сферического шарнира RO заранее неизвестно. Поэтому при освобождении от данного вида связи реакцию раскладывают на три составляющие: ХO, YO, ZO, определяемые в ходе решения задачи. По составляющим находят модуль и направление полной реакции:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Подпятник А (рис. 4.5, б) представляет собой соединение цилиндрического шарнира с опорной плоскостью,
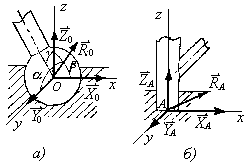
Рис. 4.5
препятствующей осевым перемещениям тела. Реакция подпятника, так же как и сферического шарнира, может иметь любое направление в пространстве и при отбрасывании связи раскладывается на три составляющие: ХА YА, ZА.,
5. Невесомый жесткий стержень (рис. 4.6). Если связь осуществляется посредством невесомого жесткого стержня, концы которого закреплены шарнирно и который нагружен только в этих шарнирах (стержни АВ и CD на рис. 4.6), то его реакция (S1 и S2) направлена вдоль прямой, соединяющей шарниры (вдоль АВ и CD), так как такой стержень препятствует перемещениям скрепленного с ним тела только вдоль этой прямой.
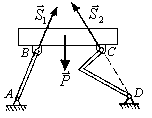
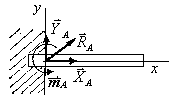
Рис. 4.6 Рис. 4.7
Решения многих задач статики сводятся к определению реакций опор, с помощью которых закрепляются балки, мостовые фермы и т. д.
6. Жесткая заделка. Примером тела, на которое наложена такая связь, может служить балка с замурованным в стену концом (рис. 4.7). Заделка исключает все перемещения тела — и вращательные, и поступательные. При действии на балку плоской системы сил в заделке возникает пара сил (см п. 4.3.5) с моментом тА - реактивный момент, препятствующий повороту балки, и произвольно направленная сила реакции Rа, препятствующая поступательным перемещениям. Эту силу заменяют двумя составляющими ее ХА и YА.
7. Связи с трением. Рассмотренные виды связей: гладкая поверхность, цилиндрический шарнир, сферический шарнир и т. д., являются идеализированными, так как при их анализе мы предполагаем, что реакция в точке контакта двух тел направлена по общей нормали к соприкасающимся поверхностям. В действительности же она отклоняется от нормали за счет возникновения составляющей, перпендикулярной нормали и препятствующей относительному скольжению тел (рис. 4.8). Эта составляющая полной реакции называется силой трения скольжения и возникает из-за шероховатостей соприкасающихся поверхностей и наличия сцепления у прижатых друг к другу тел.