

4.6.2. Работа силы
Эффект действия силы на материальное тело зависит не только от времени действия силы, но и от направления силы по отношению к перемещению точки ее приложения, а также от пути, на протяжении которого сила действует на тело. Для описания результата действия силы на материальное тело в зависимости от взаимного расположения векторов силы и перемещения и от пути, на котором действует сила, вводится понятие работы силы. Различают элементарную и полную работу силы.
Элементарная,
работа. Пусть материальная точка
М под действием силы
совершила
элементарное перемещение
![]() (рис. 4.51). Тогда элементарной работой
dA1) силы
на
перемещении
называется
скалярное произведение силы
на элементарное перемещение
точки ее приложения:
(рис. 4.51). Тогда элементарной работой
dA1) силы
на
перемещении
называется
скалярное произведение силы
на элементарное перемещение
точки ее приложения:
![]()
![]() ,
(4.104)
,
(4.104)
где α — угол между направлениями векторов и ).
Рис. 4.51 Так как, = dt, где — скорость точки М, то можно записать еще одно выражение элементарной работы:
dA= dt= F v dt cosα. (4.105)
------------------------------
1) Из данного обозначения (dA) не следует, что элементарная работа вообще является дифференциалом. Она будет таковым только при действии потенциальной силы (см. п.4.6.7).
Из формул элементарной
работы следует, что эта величина
может быть положительной, отрицательной
или же равной нулю. Если угол α между
векторами
и
(или
)
острый (cosα > 0), то
элементарная работа положительна,
если угол α тупой (cosα
< 0), то элементарная работа отрицательна,
а если угол α прямой (cosa
= 0), то элементарная работа равна нулю.
Кроме последнего случая
![]() ,
элементарная работа равна нулю, если в
данный момент F = 0, а также если
элементарное перемещение равно нулю,
т. е. в момент, когда точка М неподвижна.
В частности, силы, приложенные в
мгновенном центре скоростей тела,
не совершают работы.
,
элементарная работа равна нулю, если в
данный момент F = 0, а также если
элементарное перемещение равно нулю,
т. е. в момент, когда точка М неподвижна.
В частности, силы, приложенные в
мгновенном центре скоростей тела,
не совершают работы.
Обозначим проекции силы на оси декартовой системы координат через Fx, Fy, Fz а проекции элементарного перемещения через dx, dy, dz. Тогда
выражение для элементарной работы (по известному свойству скалярного произведения векторов) можно записать в виде
dA= · =Fxdx+Fydy+Fzdz. (4.106)
В случае, когда к
точке М приложена система сил (![]() ),
имеющая равнодействующую
,
),
имеющая равнодействующую
,
элементарная работа равнодействующей на перемещении равна алгебраической сумме элементарных работ сил системы на том же перемещении. Действительно,
![]() .
.
Работа силы на
конечном перемещении. Пусть материальная
точка М под действием силы
переместилась
из точки А в точку В по кривой l
(рис. 4.52). Разобьем кривую l на
бесконечное число элементарных отрезков
и определим на каждом из них элементарную
работу силы
.
Алгебраическая сумма всех этих
элементарных работ и будет полной
работой силы
на конечном перемещении АВ точки
ее приложения вдоль кривой I, т.е.
![]() .
.
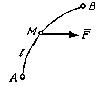 Рис.
4.52 Записанная сумма является
интегральной и может быть заменена
криволинейным интегралом, взятым вдоль
кривой l на
перемещении АВ. Тогда
Рис.
4.52 Записанная сумма является
интегральной и может быть заменена
криволинейным интегралом, взятым вдоль
кривой l на
перемещении АВ. Тогда
![]() ,
(4.107)
,
(4.107)
или
![]() ,
(4.108)
,
(4.108)
где момент времени t = 0 соответствует моменту нахождения точки М в положении А, а момент t — моменту нахождения точки М в положении В. Последняя запись особенно удобна в том случае, когда сила известна как функция времени. Еще раз необходимо подчеркнуть, что полная работа силы в общем случае зависит от траектории точки ее приложения и лишь в частных случаях, которые мы рассмотрим позднее, зависит только от начального и конечного положений точки приложения.
Единицы измерения элементарной и полной работ одинаковы: это Н·м = Дж (джоуль).
В качестве примеров вычисления полной работы силы найдем работу силы тяжести, силы ньютоновского тяготения и силы упругости.
Работа силы тяжести. Пусть точка М, на которую действует сила тяжести Р = mg, переместилась из положения М0 с координатами x0, y0, z0 в положение М1 с координатами x0, y0, z0, (рис. 4.53) (ось Oz направлена вертикально вверх). Определим элементарную и полную работу силы на этом перемещении. Вблизи поверхности Земли силу тяжести можно считать постоянной и направленной по вертикали вниз, поэтому она имеет проекции Рx=Ру= 0, Pz = - mg, и ее элементарная
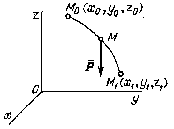 Рис. 4.53
работа равна
Рис. 4.53
работа равна
dA = Рх dx + Ру dy + Pzdz = - mg dz.
Полная работа силы на перемещении М0М1

,
или A = mgh, (4.109)
где h = z0 - z1 высота, на которую опустилась точка. Таким образом, работа силы тяжести положительна, когда точка опускается, и отрицательна, когда точка поднимается.
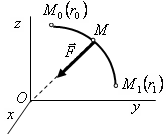
Работа силы ньютоновского тяготения. Пусть на материальную точку М действует сила тяготения, которая притягивает точку к неподвижному центру О и модуль которой равен F = km/r2, где т — масса точки М, r — модуль радиуса-вектора точки М относительно центра притяжения, a k —коэффициент пропорциональности (рис. 4.54). В векторной форме силу тяготения можно записать в виде
![]()
 ,
,
где r/ — единичный вектор радиуса-вектора точки М. Элементарная работа этой силы равна
![]() .
.
Рис. 4.54
Здесь
![]() ,
но скалярное произведение вектора
самого на себя равно просто квадрату
его модуля, так что
,
но скалярное произведение вектора
самого на себя равно просто квадрату
его модуля, так что
d( · )/2 = dr2/2 = rdr,
и мы получаем
![]() .
.
Если точка М
переместилась из начального положения
М0(r0) в конечное
положение M1(r1),
то полная работа силы тяготения на этом
перемещении равна А=![]() =
= ,
или окончательно
,
или окончательно
![]() .
(4.110)
.
(4.110)
Работа положительна, если r0>r1, то есть если точка приближается к центру тяготения.
Работа силы упругости. Рассмотрим груз М, лежащий на горизонтальной плоскости и прикрепленный к пружине жесткостью с (рис. 4.55). Выберем начало координат в положении, при котором пружина не напряжена, и определим работу, которую совершит сила упругости пружины при перемещении тела М из положения М0(х0) в положение M1(x1). Находим проекции силы : Fy = Fz = 0, Fx =.- сх, затем ее элементарную работу:
dA = Fxdx + Fydy + Fzdz = - cx dx,
 и,
наконец, полную работу:
и,
наконец, полную работу:
и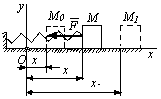 ли
окончательно
ли
окончательно
![]() .
(4.111)
.
(4.111)
При данном выборе начала координат координаты х0 и х1 представляют собой начальную
Рис. 4.55 и конечную деформации
пружины, то есть х0= Δlнач, х1=Δlкон.
Поэтому
А=![]() . (4.112)
. (4.112)
Работа силы упругости положительна, если начальная деформация пружины больше конечной, т. е. если точка М приближается к положению, при котором пружина не деформирована.
В разобранных примерах работа силы не зависит от пути, по которому двигалась точка ее приложения. Такие силы называются потенциальными.