

4.3.5. Пара сил
Рассмотрим теперь действующую на твердое тело систему двух сил, которые равны по модулю, параллельны, направлены в противоположные стороны и линии действия, которых не совпадают (рис. 4.32). Согласно предыдущему, такая система сил не имеет равнодействующей, но вместе с тем не уравновешена, и поэтому ее рассматривают как самостоятельный силовой фактор и называют парой сил. Таким образом,
парой сил называется совокупность двух равных противоположно направленных сил, линии действия которых не совпадают.
Плоскость, в которой лежат силы пары, называется плоскостью действия пары, а расстояние между линиями действия сил пары — плечом пары (h на рис. 4.32).
П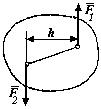 ри
действии пары сил на свободное твердое
тело последнее совершает вращательное
движение. Вращательный эффект действия
пары определяется ее плоскостью,
направлением поворота в этой плоскости
и интенсивностью воздействия пары на
тело, которая
ри
действии пары сил на свободное твердое
тело последнее совершает вращательное
движение. Вращательный эффект действия
пары определяется ее плоскостью,
направлением поворота в этой плоскости
и интенсивностью воздействия пары на
тело, которая
Рис. 4.32 определяется силами пары и плечом пары.
Для характеристики этого воздействия пары на тело, учитывающей все перечисленные выше факторы, введем в рассмотрение векторный момент пары.
В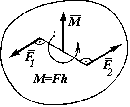 екторным
моментом пары сил называется
вектор, равный по модулю произведению
модуля одной из сил пары на плечо пары.
Направлен этот вектор (рис. 4.33)
перпендикулярно плоскости действия
пары в ту сторону, откуда
екторным
моментом пары сил называется
вектор, равный по модулю произведению
модуля одной из сил пары на плечо пары.
Направлен этот вектор (рис. 4.33)
перпендикулярно плоскости действия
пары в ту сторону, откуда
Рис. 4.33 мы видим вращение тела, вызываемое парой, происходящим против хода часовой стрелки.
Введем в рассмотрение радиус-вектор точки приложения одной из сил пары относительно точки приложения второй (рис. 4.34). Тогда векторный момент пары можно записать в виде векторного произведения
![]() .
(4.48)
.
(4.48)
Д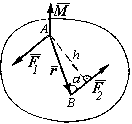 ействительно,
полученный вектор
ействительно,
полученный вектор
![]() направлен
перпендикулярно плоскости действия
пары в ту сторону, откуда мы видим
вращение тела, вызываемое парой,
происходящим против хода часовой
стрелки. Его модуль равен
направлен
перпендикулярно плоскости действия
пары в ту сторону, откуда мы видим
вращение тела, вызываемое парой,
происходящим против хода часовой
стрелки. Его модуль равен
М = rFsinα = Fh,
то есть модулю момента пары.
Если на тело действуют несколько пар сил и эти пары лежат в одной плоскости, то векторы моментов пар параллельны и вместо них можно рассматривать
Рис. 4.34 алгебраические моменты.
Алгебраический момент пары сил равен взятому с определенным знаком произведению модуля одной из сил пары на ее плечо. Знак плюс берется в случае, когда мы видим вращение тела, вызываемое парой, происходящим против хода часовой стрелки; таким образом,
М = ±Fh. (4.49)
4.3.6. Главный вектор и главный момент системы сил. Свойства внутренних сил
Пусть на механическую
систему действует система п сил
![]() .
Тогда главным вектором данной
системы сил называется сила,
равная геометрической сумме всех сил
системы:
.
Тогда главным вектором данной
системы сил называется сила,
равная геометрической сумме всех сил
системы:
. (4.50)
Главным моментом системы сил относительно произвольной точки О называют векторную сумму моментов всех сил системы относительно, этой точки:
![]() . (4.51)
. (4.51)
Эти два новых понятия играют большую роль в динамике и статике.
Как уже упоминалось выше, силы, действующие на механическую систему, делятся на внешние и внутренние. К внешним силам относятся силы, действующие на тела рассматриваемой механической системы со стороны других материальных тел, не входящих в данную систему. К внутренним силам относятся силы взаимодействия между телами рассматриваемой механической системы. Рассмотрим некоторые свойства внутренних сил.
В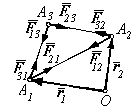 соответствии с третьим законом Ньютона
каждые две материальные точки механической
системы действуют друг на друга с равными
и противоположно направленными
силами. Например, сила
соответствии с третьим законом Ньютона
каждые две материальные точки механической
системы действуют друг на друга с равными
и противоположно направленными
силами. Например, сила
![]() действия точки A1
на точку А2 (рис. 4.35) равна и
противоположна силе
действия точки A1
на точку А2 (рис. 4.35) равна и
противоположна силе
![]() действия точки А2 на точку A1
и т. д. Таким образом, все внутренние
силы
действия точки А2 на точку A1
и т. д. Таким образом, все внутренние
силы
Рис. 4.35 попарно равны и противоположно направлены.
Поэтому их главный вектор
![]() .
.
Следовательно, главный вектор системы внутренних сил равен нулю:
= 0 . (4.52)
Определим главный момент внутренних сил относительно произвольной точки О:
![]() Легко
видеть, что сумма каждой пары слагаемых
правой части равна нулю
Легко
видеть, что сумма каждой пары слагаемых
правой части равна нулю
![]() =
=
=![]()
![]() ,
,
так
как вектор![]() коллинеарен силе
.
Поэтому и вся сумма равна нулю, то есть
главный момент внутренних сил системы
относительно произвольной точки О равен
нулю
коллинеарен силе
.
Поэтому и вся сумма равна нулю, то есть
главный момент внутренних сил системы
относительно произвольной точки О равен
нулю
=0. (4.53)