

4.6. Теорема об изменении кинетической энергии
4.6.1. Кинетическая энергия точки и системы точек
Несмотря на то, что кинетический момент раскрывает дополнительные свойства движения механической системы по сравнению с ее количеством движения, даже совокупность этих динамических характеристик не может описать движения системы, происходящего за счет внутренних сил. Чтобы убедиться в этом, достаточно рассмотреть следующий пример. Пусть два одинаковых тела, соединенных пружиной, покоятся на гладкой горизонтальной поверхности. Растянем пружину и отпустим грузы, не сообщая им начальной скорости. Под действием внутренних сил они начнут совершать прямолинейные колебания, такие, что скорости тел в каждый момент времени равны между собой и противоположно направлены. Общее количество движения системы и ее кинетический момент относительно любой неподвижной точки тождественно равны нулю, хотя система находится в движении; таким образом, в данном случае эти две величины никак не характеризуют движения системы. Поэтому в механике рассматривается еще одна мера механического движения, называемая кинетической энергией.
Кинетической энергией материальной точки называется скалярная (всегда положительная) величина, равная половине произведения массы точки на квадрат ее скорости:
![]() .
(4.99)
.
(4.99)
Кинетической энергией системы п материальных точек называется арифметическая сумма кинетических энергий всех точек системы:
 .
(4.100)
.
(4.100)
Кинетическая энергия механической системы равна нулю только в том случае, когда все точки системы неподвижны. В противном случае кинетическая энергия — величина заведомо положительная, отличная от нуля, независимо от того, какими силами вызвано движение точек системы. Однако, будучи величиной скалярной, кинетическая энергия не определяет направления движения, поэтому она (так же, как и количество движения, и кинетический момент) не является универсальной мерой движения механической системы.
Чтобы упростить подсчет кинетической энергии системы твердых тел, выведем из формулы (4.100) выражения для кинетической энергии твердого тела в простейших случаях его движения.
Поступательное движение. В этом случае скорости всех точек тела одинаковы, vk = v, и поэтому кинетическая энергия твердого тела при поступательном движении равна
 ,
,
где М =![]() —
масса тела.
—
масса тела.
Вращательное движение. Скорости точек тела определяются в этом случае выражением vk = ωhk, где hk — расстояние от точки тела до оси вращения, а ω — угловая скорость тела, одинаковая для всех его точек. Тогда
 .
.
По определению![]() ,
является моментом инерции тела
относительно оси вращения (например,
оси z), то есть
,
является моментом инерции тела
относительно оси вращения (например,
оси z), то есть
![]() и окончательно кинетическая энергия
твердого тела при его вращательном
движении равна
и окончательно кинетическая энергия
твердого тела при его вращательном
движении равна
![]() (4.101)
(4.101)
П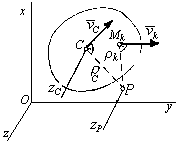 лоскопараллельное
движение. Пусть плоская фигура движется
в плоскости Оху (рис. 4.50) и ее мгновенный
центр скоростей находится в точке Р.
Скорость каждой точки фигуры
определяется как скорость при вращении
точки вокруг мгновенного центра
скоростей:
лоскопараллельное
движение. Пусть плоская фигура движется
в плоскости Оху (рис. 4.50) и ее мгновенный
центр скоростей находится в точке Р.
Скорость каждой точки фигуры
определяется как скорость при вращении
точки вокруг мгновенного центра
скоростей:
![]() ,
,
где ω - угловая скорость фигуры, одинаковая для всех ее точек, а ρk – расстояние от k-й точки до мгновенного центра скоростей. Таким
Рис. 4.50 образом, выражение для
кинетической энергии принимает вид
 .
.
Полученная сумма![]() представляет собой момент инерции
фигуры относительно оси zP,
перпендикулярной плоскости движения
фигуры и проходящей через мгновенный
центр скоростей Р.
представляет собой момент инерции
фигуры относительно оси zP,
перпендикулярной плоскости движения
фигуры и проходящей через мгновенный
центр скоростей Р.
Обозначим его
через
![]() и
окончательно получим
и
окончательно получим
![]() (4.102)
(4.102)
Этой формулой удобно пользоваться в том случае, когда в процессе движения момент инерции JzP его вычисление для каждого положения фигуры не вызывает затруднения. Однако чаще всего это условие не соблюдается или для определения кинетической энергии пользуются другим выражением. Для его вывода выразим момент инерции JzP через момент инерции относительно центральной оси zC , параллельной оси zP и проходящей через центр масс С:
![]() ;
;
здесь М- масса тела. Подставим это значение в формулу кинетической энергии:
![]() .
.
Так как
![]() - скорость центра масс, то
- скорость центра масс, то
![]() (4.103)
(4.103)
То есть кинетическая энергия твердого тела при плоскопараллельном, движении равна сумме кинетической энергии центра масс, в котором условно сосредоточена масса всего тела, и кинетической энергии тела при его вращении вокруг центральной оси, перпендикулярной плоскости движения.
Пример. Вычислить кинетическую энергию однородного круглого диска массой т, катящегося без скольжения по прямолинейному рельсу, если скорость центра диска равна vC.
Решение. Диск совершает плоскопараллельное движение, и поэтому
.
Для
однородного круглого диска,
![]() ,
точка касания с рельсом является
мгновенным центром скоростей, так что
ω = vC
/r,
и окончательно
,
точка касания с рельсом является
мгновенным центром скоростей, так что
ω = vC
/r,
и окончательно
![]() .
.